

16. Принципы организации ввода-вывода данных в микропроцессорных системах.
Вводом/выводом (ВВ) называется передача данных между ядром ЭВМ, включающим в себя микропроцессор и основную память, и внешними устройствами (ВУ). Это единственное средство взаимодействия ЭВМ с "внешним миром", и архитектура ВВ (режимы работы, форматы команд, особенности прерываний, скорость обмена и др.) непосредственно влияет на эффективность всей системы. В процессе ввода/вывода передается информация двух видов: управляющие данные и собственно данные. Управляющие данные от процессора, называемые также командными словами, инициируют действия, не связанные непосредственно с передачей данных, например запуск устройства, запрещение прерываний и т.п. Управляющие данные от внешних устройств называются словами состояния; они содержат информацию об определенных признаках, например о готовности устройства к передаче данных, о наличии ошибок при обмене и т.п.
ВВ данных:
1. Программно-управляемый ввод (вывод):
1) синхронный (безусловный) ВВ (ВУ всегда готово);
IN(OUT) PORT N
2) асинхронный ВВ;
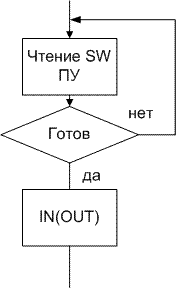
3) ВВ по запросу прерывания (устройство запрашивает прерывание выполняемой программы для ввода).
2. ВВ по каналу ПДП.
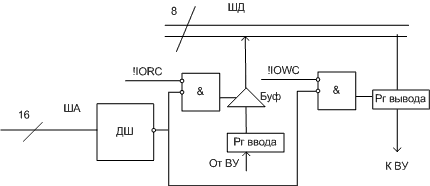
Схемотехнические средства ВВ:
17. Схемы портов параллельного синхронного ввода–вывода мп – систем.
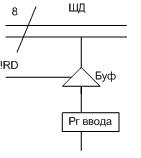
Схема:
Программирование
1. Процедура ввода с фиксированного порта N:
push PSW; сохранение СПП
in A,PORT N; ввод в аккумулятор
mov M,A; пересылка в память
pop PSW
ret
2. Процедура с настраиваемым номером порта. Пусть N порта задан в Рг С
Im: push PSW 1б
+1 mov A,C; передать номер порта в аккумулятор 1б
+2 sta a,Im+6; вместо 0 будет номер порта, хранящийся в А 3б
+5 in A,0; в А запишется содержимое порта с номером в А 2б
mov M,A
pop PSW
ret
Предполагается, что для хранения данных используется ОП.
3. Процедура вывода в фиксированный порт N:
push PSW
mov A,M; пересылка из памяти
out PORT N,A
pop PSW
ret
18. Схемы портов параллельного асинхронного ввода-вывода мп – систем.
Схема асинхронного ввода:
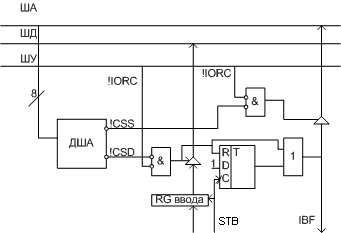
STB – строб от ВУ
IBF – флаг готовности порта (входной буфер заполнен)
CSD – выборка данных
CSS – выборка состояния
RDD – чтение данных
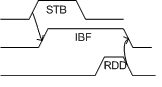
Временная диаграмма работы:
Процедура асинхронного ввода через порт:
PUSH PSW
WAIT: IN A,CSS; ввод состояния порта
ANI A,IBF; проверка готовности
JZ WAIT
IN A,CSD; ввод данных
MOV M,A; сохранение в памяти
POP PSW
RET
Схема асинхронного вывода:
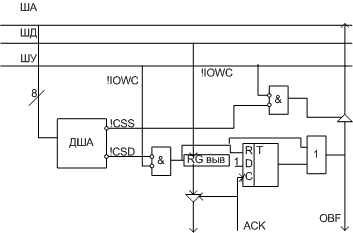
ACK – сигнал подтверждения от ВУ
OBF – флаг готовности порта (если ОBF = «1», то имеется готовность к дальнейшему выводу данных)
CSD – выборка данных
CSS – выборка состояния
WRD – запись данных
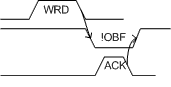
Временная диаграмма работы:
Процедура асинхронного вывода через порт:
PUSH PSW
WAIT: IN A,CSS; считываем флаг состояния
ANI A,NОBF; проверка готовности
JZ WAIT
MOV A,M;
OUT CSD,A
POP PSW
RET