

50. Таймеры микроконтроллеров avr. Использование таймеров для сравнения, захвата событий, формирования шим-сигналов, в сторожевом режиме.
Таймер-счетчик типа А
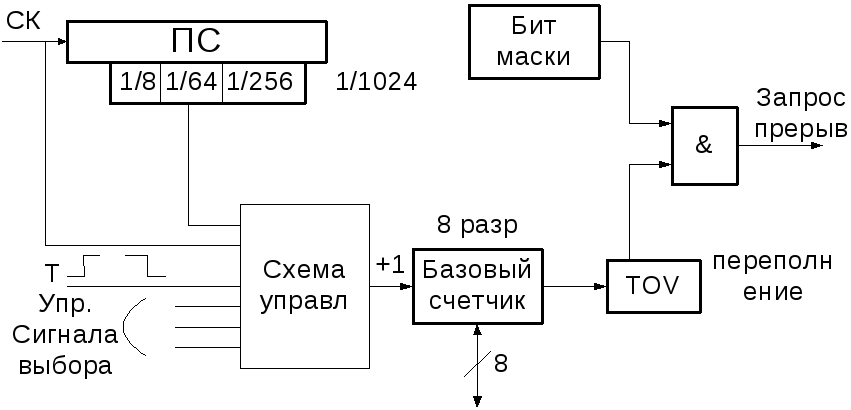
Режим работы: таймерный и счетчик событий, поступающих по линии Т
Таймер-счетчик типа В
Помимо основных базовых функций таймер/счет событий имеет функцию сравнения и ШИМ.
Р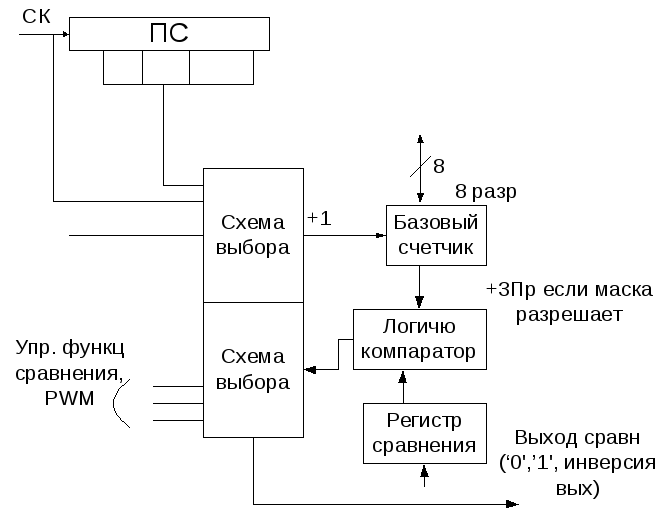 абота
базового счетчика в режиме сравнения
абота
базового счетчика в режиме сравнения
Данная функция заключается в непрерывном (каждый машинный цикл) сравнении содержимого счётного регистра таймера/счётчика и регистра сравнения. При совпадении содержимого этих регистров устанавливается флаг соответствующего прерывания, а также могут выполняться другие действия.
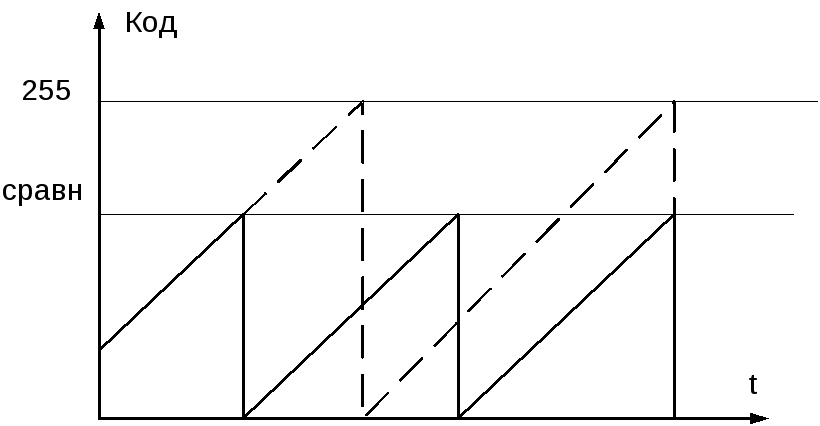
Работа в режиме ШИМ
Широтно-импульсная модуляция заключается в генерировании сигнала с программируемыми частотой и скважностью.

t – период входного сигнала базового счетчика
Таймер-счетчик типа D
Базовый счетчик на 16 разрядов, функция сравнения (max код сравнения – 255, 511, 1023), ШИМ и функция захвата (данная функция заключается в сохранении в определённый момент времени состояния таймера/счётчика (значения счётного регистра))
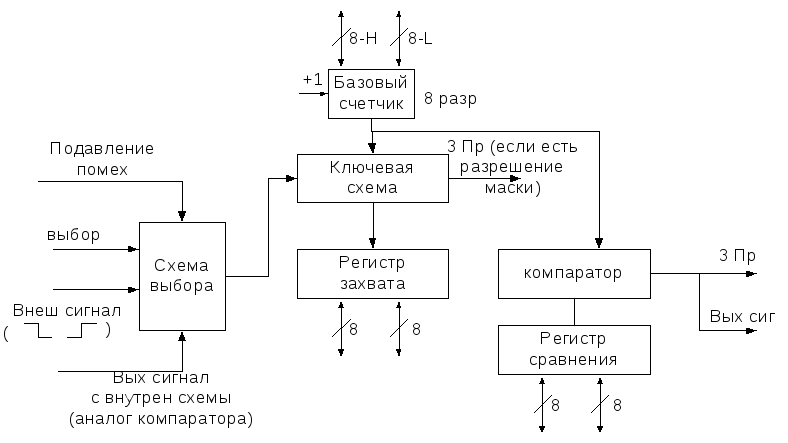
Таймер-счетчик типа Е отличается от D типа наличием дополнительного канала В без захвата
Сторожевой таймер
Основная функция сторожевого таймера – защита устройства от сбоев. Благодаря сторожевому таймеру можно прервать выполнение зациклившейся программы или выйти из других непредвиденных ситуаций, препятствующих нормальному выполнению программы.
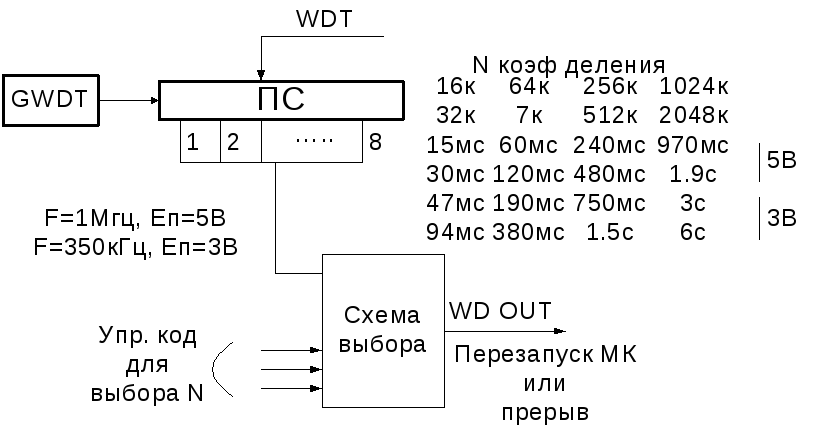
WDT – команда сброса сторожевого таймера
Таймер-часы реального времени
