

9. Задачи линейной теории автоматического управления.
1 Изучение динамических свойств и характеристик различных звеньев автоматических систем любой физической природы
2 Формирование функциональных и структурных схем САУ
3 Построение динамических характеристик САУ
4 Определение показателей точности и ошибок САУ
5 Исследование устойчивости САУ
6 Оценка качественных показателей процесса управления
7 Изучение различных видов корректирующих устройств вводимых в САУ для повышения точности и улучшения динамических свойств.
Математический аппарат исследования САУ.
Для исследования динамических свойств САУ используют следующие типовые сигналы:
1 Ступенчатый
2 Импульсный
3 Гармонический
4 Линейно- нарастающий
5 Прямоугольный.
Ступенчатый
сигнал наиболее простой- функция
времени, которая в момент времени
![]() и достигает значения
и достигает значения
![]() и далее остается постоянным
и далее остается постоянным
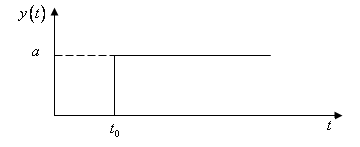

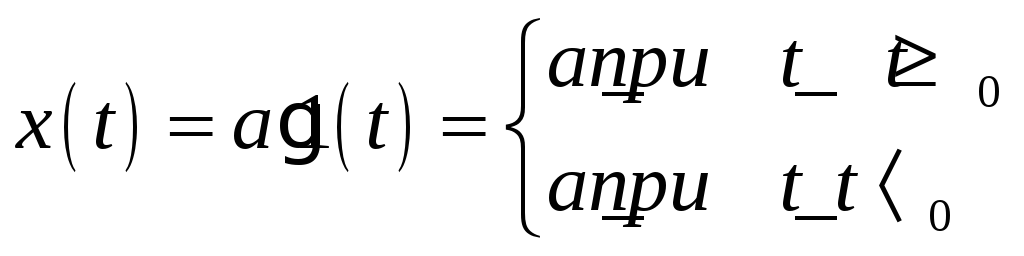
1(t)-единичная функция времени
Импульсный
сигнал- предел прямоугольного
импульса высотой h и
длительностью Δt при
![]() и
и
![]()
Площадь
импульса определяется
![]() ,
при этом сигнал представляет собой
производную от ступенчатого сигнала
и описывается по формуле:
,
при этом сигнал представляет собой
производную от ступенчатого сигнала
и описывается по формуле:
![]()
![]() -
функция Дирана
-
функция Дирана
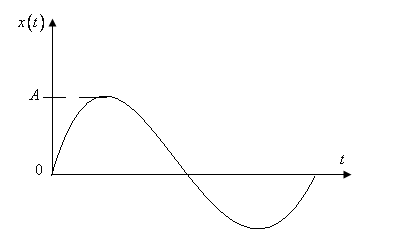
Гармонический сигнал
![]()
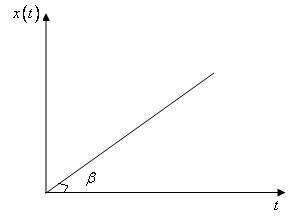
Линейно-нарастающий
![]()
Прямоугольный импульс (то же что и ступенчатый, только заканчивается ).
Динамические характеристики отображают переходные процессы в системе при различных формах воздействия и определяются с использованием соответствующих сигналов:
1 Ступенчатый сигнал- для получения переходной характеристики
2 Импульсный сигнал - для получения весовой характеристики
3 Гармонический сигнал- при исследовании частотных свойств сигнала
4 Линейно-нарастающий – при исследовании динамики следящих систем
Прямоугольный сигнал – при построении комплексной характеристики САУ
Уравнения динамики САУ и их решение.
Исследование переходных процессов САУ основывается на использовании дифференциальных уравнений при изучении динамических процессов САУ. При этом отвлекаются от конкретной физической природы процессов, а используют лишь их математическую модель.
В основе построения математической модели лежит ее структурная схема, состоящая из типовых математических звеньев.
В свою очередь каждое типовое динамическое звено описывается дифференциальными или операторными уравнениями, которые описывают физическую природу происходящих в них процессах.
![]()
Процесс
дифференцирования Лаплас предложил
заменить функцией
![]() -
оператор Лапласа, а процесс интегрирования
на
-
оператор Лапласа, а процесс интегрирования
на
![]() ,
получил:
,
получил:
![]()
Одно конкретное устройство САУ (электродвигатель, реле, трансформатор) описывается одним дифференциальным уравнением.
Совокупность нескольких дифференциальных уравнений динамических звеньев представляет собой математическую модель всей системы и служит для получения общего характеристического уравнения системы в целом.
Аналитические методы расчета основаны на использовании классических или операторных методах:
1 Классическое вариационное исчисление
2 Принцип максимума Л.С.Понтрягина
3 Метод динамического программирования Р.Беллмана.