

4. Обработка результатов измерений.
Получение алгоритма автоматической обработки результатов измерений возможно при решении следующих задач:
-
определение теоретического закона распределения случайных погрешностей измерений
-
проверка правдоподобия найденной теоретической закономерности опытным данным
-
определение числовых характеристик (ожидание корреляция) случайных погрешностей измерений, оценка их точности и надежности.
Оценки полученные в результате статистической обработки результатов измерений должны обладать следующими качествами:
-
несмещенность оценки
 ,
где х – значение случайной величины,
,
где х – значение случайной величины,
 -
оценка значения случайной величины.
Несмещенность оценки – равенство
математического ожидания оценки
измеряемому параметру
-
оценка значения случайной величины.
Несмещенность оценки – равенство
математического ожидания оценки
измеряемому параметру -
эффективность оценки – т.е. должен быть обеспечен минимум среднего квадрата ошибки данной оценки
 , где
, где
 -
рассматриваемая оценка,
-
рассматриваемая оценка,
 -
любая другая оценка, х
– значение случайной величины
-
любая другая оценка, х
– значение случайной величины -
Состоятельность оценки
![]() ,
т.е. сходимость по вероятности при
,
т.е. сходимость по вероятности при
![]() к оцениваемому параметру. Где
к оцениваемому параметру. Где
![]() -
любая на перёд заданная величина
-
любая на перёд заданная величина
С учётом рассмотренных особенностей и требований, оценку значения случайной погрешности измерений (распределенных по нормальному закону) можно определить по следующей формуле:
1.
![]() -
статистическое математическое ожидание
(среднее значение)
-
статистическое математическое ожидание
(среднее значение)
2.
 -
дисперсия
-
дисперсия
3.
 - автокорреляция (
- автокорреляция (![]() )
)
4.
 - взаимная корреляция
- взаимная корреляция
26 Метод компенсаций погрешности измерений. Фильтр Калмана.
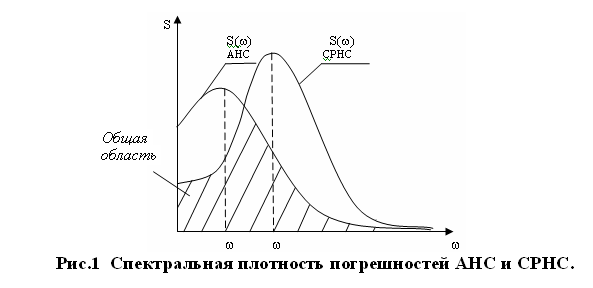
Для снижения влияния погрешности измерений в измерительное устройство вводят математические модели динамики судна и математические модели случайных погрешностей измерений. Для большинства приложений в технике приходится иметь дело со стационарными случайными процессами. Закон распределения составляющих этих процессов может считаться нормальным, - спектральная плотность погрешности достаточно хорошо апроксимируется дробно-рациональной функцией.
Характер погрешности измеренного параметра по различным системам различен. Повысить точность и надёжность ОМС можно за счёт совместного использования нескольких измерительных систем:
- автономная навигационная система
- спутниковая сетевая РНС
![]() - автономная система
- автономная система
![]() - СРНС
- СРНС
Погрешности СРНС имеют хорошую долговременную стабильность параметра на воздействие широкополосных помех.
Погрешности АНС обладают хорошей кратковременной стабильностью.
В связи с тем, что различные навигационные системы имеют различные частотные характеристики погрешностей то имеется возможность их разделения и выделения, т.е. фильтрация.
Рассмотрим в качестве примера схему компенсаций погрешностей измерений с помощью фильтра Калмана :
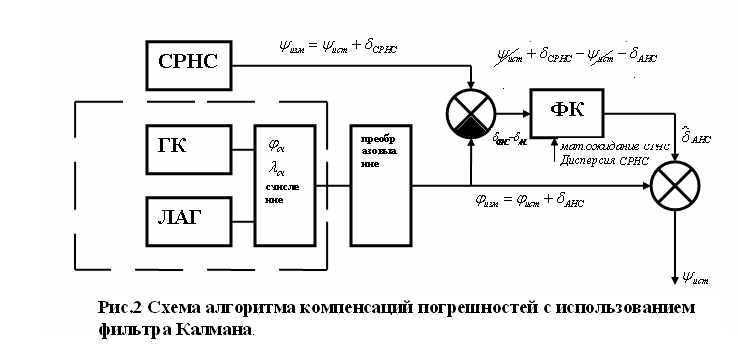
На
выходе фильтра в результате фильтрации
получаем
![]() - не верно
- не верно
![]() !!!
!!!
В результате использования фильтра Калмана, результирующая погрешность алгоритма компенсации определяется только погрешностью работы фильтра Калмана.
Для повышения точности работы алгоритма компенсации, необходимо повышать точность математической модели погрешности измерений.
Особенности решения навигационной задачи с использованием вероятностных алгоритмов обработки результатов измерений.
Основное содержание заключается в определении координат и скоростей объекта являющихся основой их векторосостояния.
![]() - географическая
система координат низкоскоростных
объектов.
- географическая
система координат низкоскоростных
объектов.
![]() -
для высокоскоростных объектов
-
для высокоскоростных объектов
Для нахождения данных величин, используют алгоритмы, которые отличаются ходом вычислительного процесса. На практике используются итерационные алгоритмы. В основу метода статистического оценивания могут быть положены следующие критерии качества оптимизации:
-
минимум дисперсии ошибок оценки вектора состояния
-
минимум суммы модуля невязок
-
максимум функций правдоподобия
-
максимум плотности апостериорной вероятности
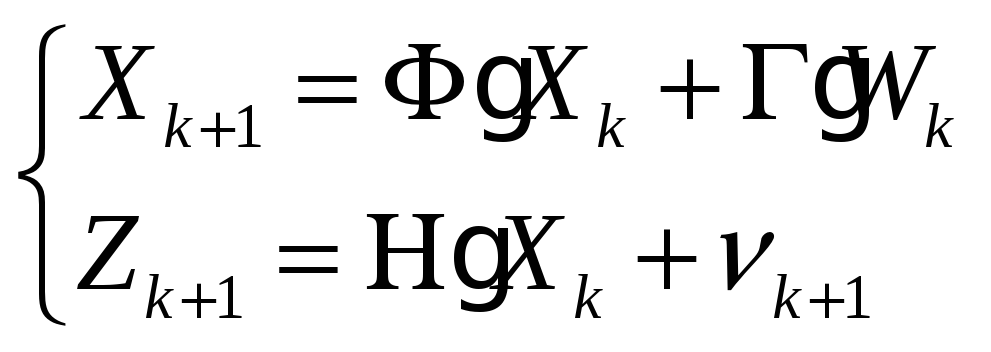
Уравнение измерений в вероятностном алгоритме может быть представлено в виде разностных матрично-векторных уравнений
 , где
, где
Х – вектор состояния
Ф – фундаментальная матрица (математическая модель движения объекта)
Г - матрица коэффициентов погрешностей измерений
Н – матрица коэффициентов проекций градиентов навигационных параметров
![]() - вектор шумов
измерений
- вектор шумов
измерений
W – вектор шумов системы (воздействие окружающей среды)
Z – вектор значений измерений
Первое уравнение системы описывает динамику движения объекта. Второе уравнение системы описывает динамику погрешностей измерений.
Окончательно, алгоритм фильтрации методом Калмана имеет вид:
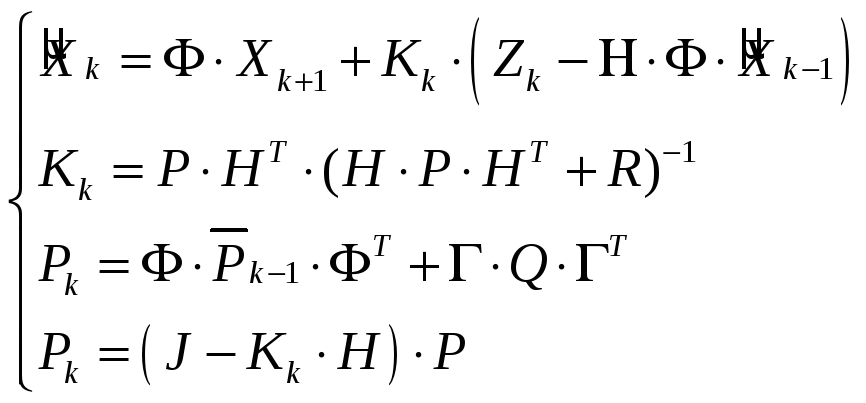 ,
где
,
где
![]() -
коэффициент усиления фильтра
-
коэффициент усиления фильтра
![]() - ковариационная
матрица погрешностей оценки навигационного
сеанса
- ковариационная
матрица погрешностей оценки навигационного
сеанса
Собственное значение матрицы Р определяют полуоси эллипса погрешностей. А собственные вектора матрицы определяют направление этих полуосей. Таким образом с использованием фильтра Калмана имеется возможность на каждый конкретный момент времени определять эллипс погрешности навигационного сеанса. Имеется возможность автоматически подстраивать работу фильтра через его коэффициент усиления к текущим условиям плавания. Это дает возможность создания автоматических адоптивных систем управлением движения судна.
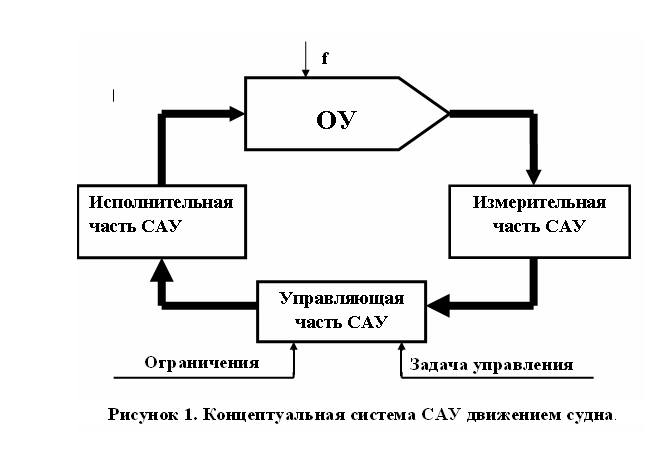
5.Теория автоматического управления.
Общие понятия и определения.
Автоматическое управление – совокупность воздействий, направленных на осуществление функционирования объекта управления в соответствии с имеемой программой или целью управления и выполнения с помощью автоматических управляющих устройств.
Объект управления – устройства, агрегаты, отдельные механизмы (двигатели, генераторы), а также целые производственные комплексы (суда, самолеты и т.д.), которые осуществляют активное воздействие на окружающую среду.
 Автоматическое
управляющее устройство – специальное
техническое устройство, осуществляющее
целенаправленное воздействие на режим
работы объектов управления посредством
специальных входов объекта.
Автоматическое
управляющее устройство – специальное
техническое устройство, осуществляющее
целенаправленное воздействие на режим
работы объектов управления посредством
специальных входов объекта.