

6. Виды автоматического управления
ОУ – объект управления
x(t)- задающее воздействие
f(t)- возмущающее воздействие
y(t)- регулируемая величина
Рассмотрим основные виды автоматического управления:
-
Автоматическое управление с разомкнутой цепью воздействий (жесткое управление).
-
Автоматическое регулирование.
-
Автоматическая настройка
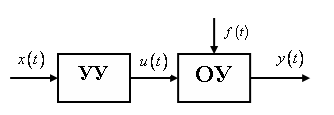
Рассмотрим жесткое управление
УУ- устройство управления.
U(t)- управляющее воздействие.
1. Первый вид управления характеризуется функциями управления, которые не ставятся в зависимость от действующего хода процесса управления и выполняется по разомкнутому циклу.
Из-за возмущающих воздействий f(t) действительное значение регулируемой величины y(t) отличается от желаемого и это отличие может быть достаточно велико.
2. Второй вид - автоматическое регулирование, характеризуется тем, что управляющее воздействие U(t) формируется с учетом действительного хода процесса с использованием устройств обратной связи.

![]()
3.Третий вид – автоматическая настройка, характеризуется функциями управления, которые автоматически приводят систему к наилучшему, в каком-либо смысле, режиму работы. Операция настройки заключается в непрерывном измерении параметров системы с целью получения оптимального режима.
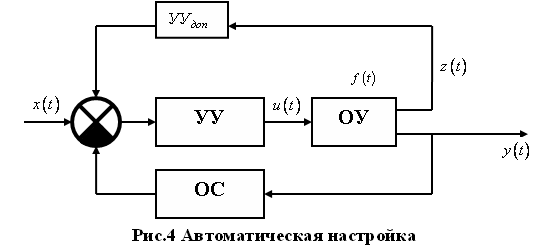
![]() - параметр объекта
управления (крен, дифферент)
- параметр объекта
управления (крен, дифферент)
![]() -
дополнительное устройство
управления
-
дополнительное устройство
управления
![]() вырабатывает
дополнительное воздействие, которое
подстраивает систему управления к
текущим условиям плавания автоматически
(т.е. без участия человека) Например:
адоптивный авторулевой.
вырабатывает
дополнительное воздействие, которое
подстраивает систему управления к
текущим условиям плавания автоматически
(т.е. без участия человека) Например:
адоптивный авторулевой.
7. Системы стабилизации
Предназначены для поддержания постоянства регулируемой величины, при этом задающее воздействие остается постоянное.
Для данной системы закон управления следующим
Xзад(t)= const
Yтек(t)= const
Рассмотрим систему автоматического поддержания заданной угловой скорости вращения вала двигателя, питаемого от электромагнитного усилителя настроенная по принципу регулирования по отклонению.
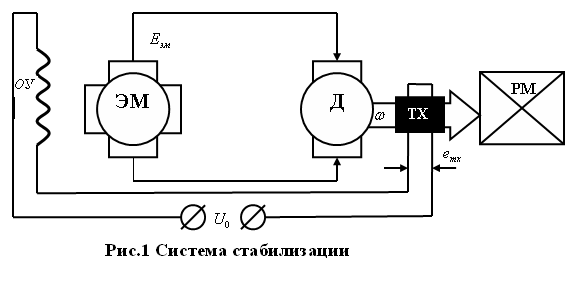
ОУ- обмотка управления электромагнитного усилителя
ЭМ- электромагнитный усилитель
Д- двигатель
Тх- тахометр
РМ- рабочий механизм
U0-питающее напряжение
E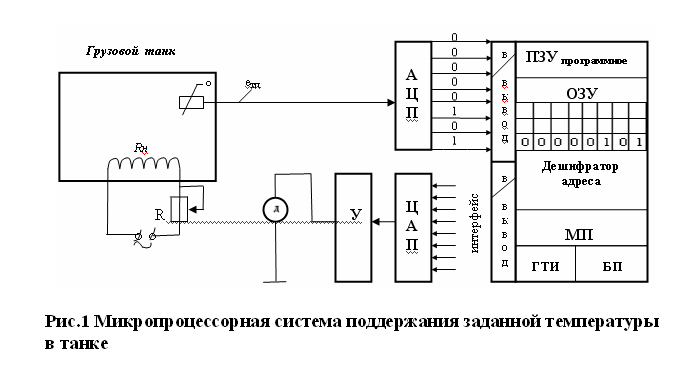 -
ЭДС электромагнитного усилителя
-
ЭДС электромагнитного усилителя
ω- частота вращения вала двигателя
етх- ЭДС тахометра
8. Система программного управления
Система программного управления служит для измерения регулируемой величины во времени по определенному закону, который называется программа
Закон управления: xзад(t)=f(t)
Рассмотрим микропроцессорную систему автоматического поддержания заданной температуры в грузовом танке.
Логический «0» представлен напряжением в пределах от 0В до 0,5В.
Логическая «1» представлена напряжением в пределах от 4,5В до 5,5В.
1 байт:
-
0
1
1
0
0
0
1
0
1 байт – одна ячейка памяти
1 1.
Основные
показатели работы САУ.
1.
Основные
показатели работы САУ.
ПП – переходный процесс
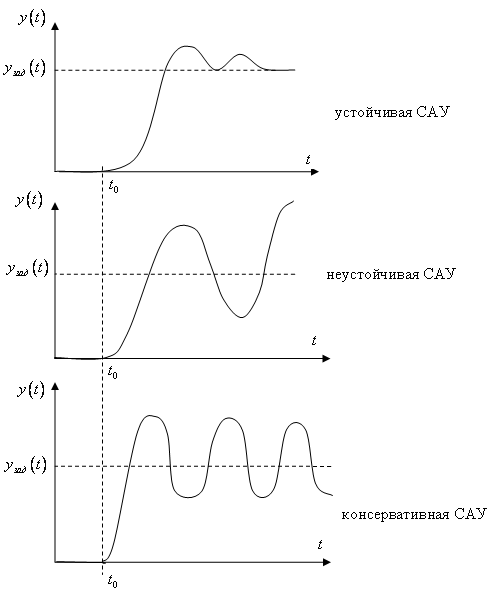
Исходя из вида переходных процессов, все САУ делятся:
1 Устойчивые САУ- при изменении входных сигналов, регулируемая величина переходит в новое заданное состояние и поддерживается сколь угодно долго.
2 Неустойчивые САУ- вызывают изменение регулируемой величины во времени без ее стабилизации.
3 Консервативные СА- система находится на грани устойчивости.
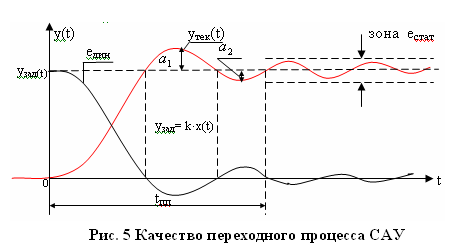
В зависимости от заданного режима САУ должна обеспечивать требуемое количество работы в переходных режимах вызванных изменением задающего параметра x(t) или возмущающего f(t)
Качество регулирования оцениваются следующими основными показателями:
1 Величина перерегулирования- отношение а1 к а2 определяет величину перерегулирования
а1 > а2 – затухающий процесс (чем больше разница, тем больше коэффициент затухания).
а1 < а2 -расходящийся процесс, САУ неустойчивая.
а1 = а2 автоколебательный процесс, коэффициент затухания равен нулю.
2 Время переходного процесса tпп чем меньше этот промежуток, тем быстрее осуществляется реакция системы на изменение входных сигналов.
Длительность переходных процессов определяется зоной статической ошибки-
![]()
![]()
k-коэффициент усиления САУ
3 Быстродействие системы- определяется промежутком времени от начала действия входного сигнала до момента первого пересечения линии yуст , определяет чувствительность системы
4 Собственная частота колебаний системы
![]()
Т- постоянная времени судна