

Пермский национальный исследовательский политехнический университет
Кафедра конструирование машин и сопротивление материалов
КУРСОВОЙ ПРОЕКТ ПО ТЕОРИИ МЕХАНИЗМОВ И МАШИН
Работу выполнил
Студент гр.ТМС-09-1
Екимова А.Н.
Проверил преподаватель
Шафранов А.В.
Пермь, 2011
Исходные данные
|
Параметр |
Обозначение |
|
|
Размеры звеньев механизма, м |
LAB |
0,13 |
|
LAC |
0,04 |
|
|
LCD |
0,18 |
|
|
LDE |
0,50 |
|
|
Массы и моменты инерции |
G2, кг |
4 |
|
G3, кг |
14 |
|
|
G4, кг |
22 |
|
|
G5, кг |
27 |
|
|
Js3 |
0.3 |
|
|
Js4 |
0.5 |
|
|
Сила технического сопротивления P раб, H |
Pраб |
900 |
|
Число оборотов |
n |
220 |
|
Данные для проектрирования кулачка |
b, мм |
240 |
|
βmax, град |
20 |
|
|
у |
60 |
|
|
д.с. |
30 |
|
|
п. |
120 |
1. Структурный и кинематическое исследование механизма
1.1. Структурный анализ механизма.
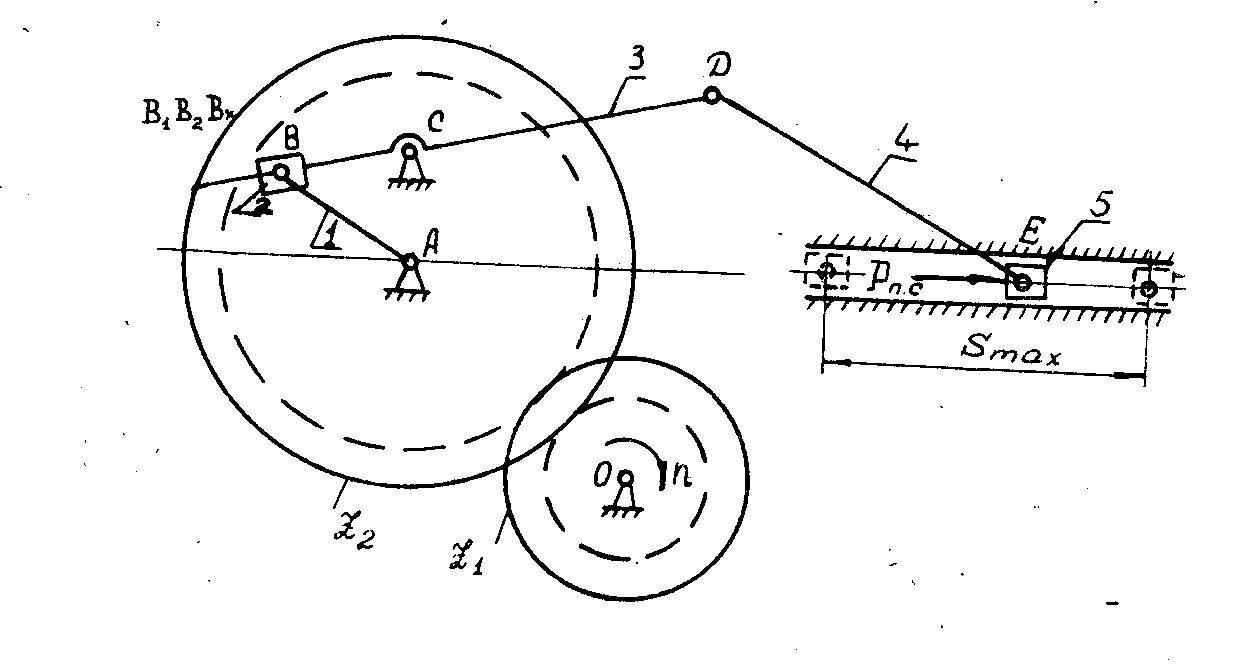
Механизм состоит из: 1- кривошип AB; 2 –Камень B кулисы; 3 – кулиса BD; 4- шатун ED; 5 - ползун E.
Количество подвижных звеньев n=5.
Кинематические пары:
-
стойка – кривошип AB;
-
Кривошип AB – камень B
-
Камень B – кулиса BD
-
Кулиса BD – стойка
-
Кулиса BD – шатун DE
-
Шатун DE – ползун E
-
Ползун E – стойка
Все пары низшие, плоские, накладывающие по 2 связи на относительное движение звеньев; количество пар p2=7.
Степень подвижности: W=3n-2p2=3·5-2·7=1
Составим структурные группы механизма и определим класс и порядок:
-
стойка – кривошип BC – механизм I класса;
-
Камень С – кулиса DE – группа II класса 3-го вида
-
Шатун EF – ползун E – группа II класса 2-го вида.
Таким образом, исследуемый механизм, обладающий одной степенью подвижности, можем рассматривать как образованный путем последовательного присоединения к стойке В и ведущему звену 1 двух групп, состоящих из звеньев 2, 3 и 4,5. По классификации И.И. Артоболевского он должен быть отнесен к механизмам II класса.
Формула строения механизма: I II3 II2
1.2. Определение начального положения механизма и построение положений звеньев механизма
Масштаб схемы. Приняв на чертеже отрезок AB=65 мм, находим:
![]()
В принятом масштабе вычерчиваем схему механизма. Для построения 12 положений звеньев механизма разделим траекторию, описываемую точкой B кривошипа AB, на 12 равных частей.
Определяем длины звеньев на схеме
![]() мм
мм
![]() мм
мм
![]() мм
мм
1.3. Исследование механизма графическим методом. Построение кинематических диаграмм.
Диаграмма перемещения. Для построения диаграммы перемещения точки E ползуна откладываем по оси абсцисс отрезок ℓ = 240 мм, изображающий период Т одного оборота кривошипа, и делим его на 12 равных частей. От точек 1, 2... ...11 диаграммы s(t) откладываем ординаты 1—1, 2—2..., 11—11, соответственно равные .расстояниям E0 - E1 E0 - E2.. . ... E0 – E11, проходимые точкой F от начала отсчета.
Вычисление масштабов диаграммы перемещения.
![]()
![]() ,
,
![]()
Диаграмма скорости. Строится графическим дифференцированием графика перемещения по методу хорд. Он заключается в следующем. Криволинейные участки графика s(t) заменяем прямыми 0-1*, 1*-2* … 11*-12*. Под графиком перемещения проводим прямоугольные оси v и t. На оси t выбираем полюсное расстояние H=45 мм. Из полюса p проводим наклонные прямые p-1’, p-2’ … p-11’, параллельные хордам 0-1*, 1*-2*…11*-0. Из середины интервалов 0-1, 1-2 …11-0 диаграммы v(t) проводим перпендикуляры к оси t (штриховые линии). Из точек 1’, 2’ … 11’ проводим прямые, параллельные оси t. Точки пересечения соединяем плавной кривой. Масштаб диаграммы скорости вычисляем по формуле
![]()
Диаграмма ускорения. Строится графическим дифференцированием диаграммы скоростей. Все построения аналогичны ранее описанным при графическом дифференцировании диаграммы перемещения. Масштаб диаграммы ускорения равен
![]()