

7.4 Порядок виконання роботи
1. Построить в VisSim виртуальный лабораторный стенд нелинейной системы из двух линейных и одного нелинейного элемента. В качестве нелинейного элемента выбрать нелинейный элемент с однозначной характеристикой и параметрами соответствующими варианту из таблицы 7.1.
Вынести на рабочее поле Vissim’а генератор синусоидального сигнала sinusoid (Blocks – Signal Producer – sinusoid), и два осциллографа (Blocks – Signal Consumer – Plot). Щелчок правой кнопкой мыши по генератору позволит задать параметры синусоидального сигнала.
Нелинейное звено с насыщением создается вынесением на рабочее поле блока Limit (Blocks – Nonlinear - Limit) и заданием его параметров .
На один осциллограф вывести входной сигнал (с генератора) и статическую характеристику нелинейной системы (с выхода схемы).
Вынести на рабочее поле блок дифференцирования Derivative (Bloks – Integration - Derivative). Для отображения фазовой траектории на один вход осцилографа необходимо подавать выходной сигнал с нелинейной системы, а на второй вход – сигнал с выхода блока Derivative и установкой XY-Plot Axis в его свойствах (двойной щелчок по осциллографу)(рисунок 7.2).
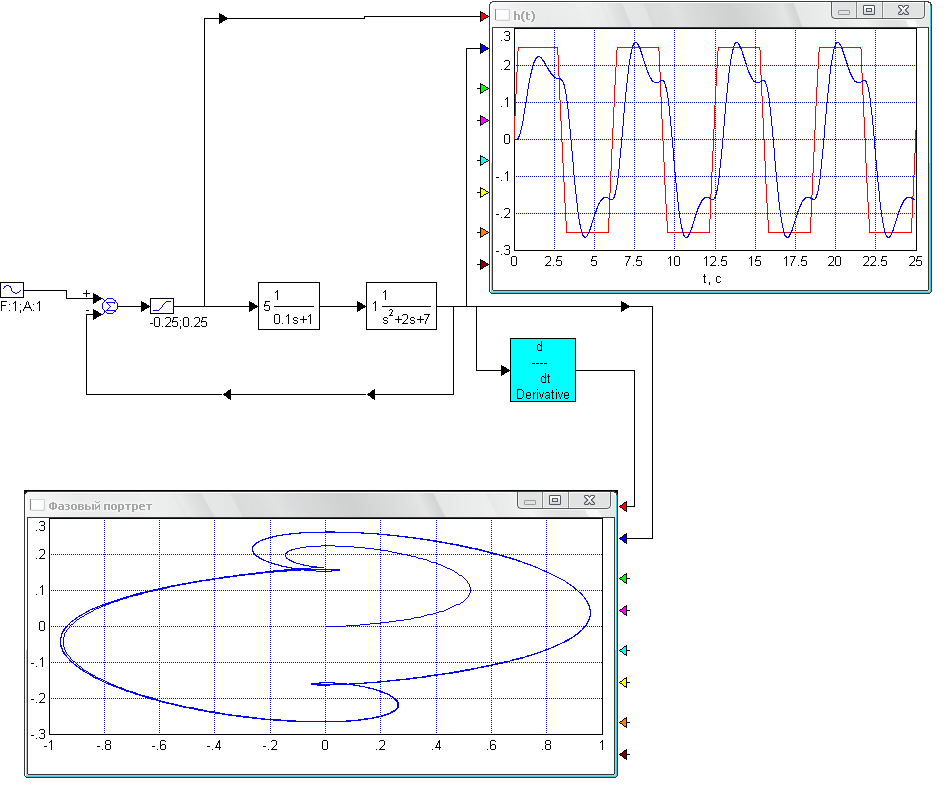
Рисунок 7.1 – Виртуальный лабораторный стенд ля изучения нелинейных систем методом фазовой плоскости

Рисунок 7.2 - Задание горизонтальной развертки осциллографа сигналом, подаваемым на первый (верхний) вход
На рисунке 7.1. представлена нелинейная система автоматического регулирования с двумя линейными элементами и с одним нелинейным элементом (статическая характеристика - з насиченням).
2. Провести моделирование лабораторного стенда изменяя время моделирования (Simulate-Simulate Properties) и параметры нелинейного элемента. Обратить внимание как изменяется статическая характеристика и фазовый портрет системы при изменении параметров нелинейного элемента. Сделать выводы об устойчивости системы.
3. Провести моделирование лабораторного стенда с нелинейным элементом с релейной характеристикой и гистерезисом (параметры характеристики в таблице 7.1) (рисунок 7.3).

Рисунок 7.3 – Виртуальный лабораторный стенд с релейным элементом и гестерезисом
5. Получить дифференциальное уравнение, описывающее исследуемую систему автоматического регулирования в MathCad. Решить дифференциальное уравнение в MathCad с помощью вычислительного блока Given/Odesolve рисунок 7.4.

Нелинейная характеристика с насыщением

Вычислительный блок для решения диф. уравнения
Дифференциальное уравнение, описывающее нелинейную САР

Начальные условия
Встроенная функция для решения диф. уравнений относительно переменной t на интервале (t0,t1)
Рисунок 7.4 – Снимок экрана MathCad с решением дифференциального уравнения
6. Задавая различные значения начальных условий, проследить как изменяется фазовый портрет системы, сделать выводы. Получить фазовый портрет нелинейной системы, если нелинейный элемент имеет релейную характеристику с гистерезисом.