

6.3 Варианты заданий
Таблиця 1
|
Нелінійні характеристики |
Графічне зображення |
Математичний опис |
|
Ідеальна релейна характеристика |
|
|
|
Релейна характеристика із зоною нечутливості |
|
|
|
Характеристика з насиченням |
|
|
|
Характеристика із зоною нечутливості та насиченням |
|
|
|
Релейна характеристика з гістерезисом |
|
|




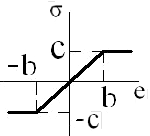
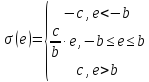

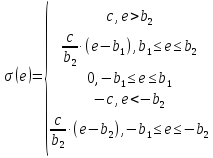
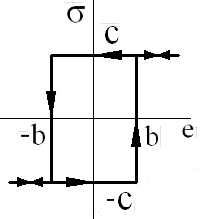
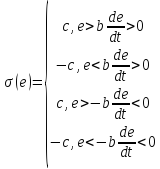
Таблица 2
|
№ |
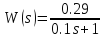
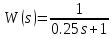
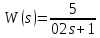
Wл(s) |
Параметри нелінійних характеристик |
Вхідний сигнал |
|
1 |
|
Для однозначних характеристик e=5 c; c=2; b=2; b1=b; b2=1; k=1 Для неоднозначних характеристик с=0.5;b=0.1 |
|
|
2 |
|
||
|
3 |
|
Для однозначних характеристик e=4 c; c=2; b=2; b1=b; b2=1; k=1 Для неоднозначних характеристик с=0.5;b=0.1 |
|
|
4 |
|
||
|
5 |
|
Для однозначних характеристик e=3 c; c=3; b=3; b1=b; b2=2; k=2 Для неоднозначних характеристик с=0.5;b=0.2 |
|
|
6 |
|
||
|
7 |
|
Для однозначних характеристик e=5 c; c=3; b=3; b1=b; b2=2; k=2 Для неоднозначних характеристик с=0.5;b=0.2 |
|
|
8 |
|


6.4 Контрольні запитання та завдання
1. Наведіть схему нелінійной системи автоматичного управління.
2. Які нелінійні ланкі вам відомі? Наведіть іх статичні характеристики.
3. Наведіть математичний опис нелінійних ланок.
4. Наведіть особливості нелінійних систем порівняно с лінійними системами автоматичного управління.
5. Що таке статична характеристика нелінійної ланки або нелінійної системи?
6. Чим характеризується нелінійна ланка, окрім статичної характеристики?
7 Дослідження нелінійних сак методом фазової площини
7.1 Мета роботи
Метою роботи є отримання практичних навичок дослідження нелінійних систем автоматичного регулювання методом фазової площини в VisSim та MathCad.
7.2 Методичні вказівки з організації самостійної роботи студентів
Способы построения фазовых портретов основаны на решении нелинейных дифференциальных уравнений и включают в себя методы "припасовывания" фазовых траекторий, точечных преобразований, моделирования, а также приближенные и численные метода. Наибольшее практическое применение получили методы численного интегрирования нелинейных дифференциальных уравнений в связи с широким внедрением в практику исследований средств вычислительной техники.
Метод фазовой плоскости используется для исследования нелинейных систем, линейная часть которых описывается дифференциальным уравнением не выше второго порядка, а нелинейный элемент может быть любым. Метод заключается в том, что из уравнений состояния исключается время и определяются уравнения фазовых кривых. Задача значительно упрощается, если нелинейный элемент обладает кусочно-линейной характеристикой. Тогда фазовое пространство разбивается на ряд областей, где работа нелинейной системы описывается обыкновенными линейными уравнениями, на основании которых строятся фазовые траектории. Непрерывность движения изображающей точки на фазовом пространстве (переход из одной области в другую) обеспечивается "сшиванием" по линиям переключения в соответствии с видом нелинейности. При исследовании нелинейных систем высокого порядка их аппроксимируют системами второго порядка с эквивалентным запаздыванием. Уравнение фазовой траектории может быть получено из уравнений состояния
 , (7.1)
, (7.1)
где: x1, x2
- координата системы и ее производная;
 -
нелинейная функция.
-
нелинейная функция.
Разделив второе из уравнений на первое, получим уравнение фазовой траектории, в котором отсутствует время t в явном виде:

Решение уравнения
(7.2)
 изображается
на фазовой плоскости (x1;x2).
По оси абсцисс откладывается сама
координата x1, а по оси ординат
откладывается ее первая производная
x2. Каждой совокупности начальных
условий (x10, x20) соответствует
свое решение и своя фазовая траектория.
Семейство фазовых траекторий характеризует
все возможные виды переходных процессов
в данной системе управления при любых
начальных условиях и образует ее фазовый
портрет.
изображается
на фазовой плоскости (x1;x2).
По оси абсцисс откладывается сама
координата x1, а по оси ординат
откладывается ее первая производная
x2. Каждой совокупности начальных
условий (x10, x20) соответствует
свое решение и своя фазовая траектория.
Семейство фазовых траекторий характеризует
все возможные виды переходных процессов
в данной системе управления при любых
начальных условиях и образует ее фазовый
портрет.
Основные свойства фазовых траекторий вытекают из выражения (7.2):
1) если F(x1,x2) определена и непрерывна в некоторой области и имеет непрерывные частные производные по своим аргументам, то через каждую точку фазовой плоскости, за исключением особых точек, проходит единственная фазовая траектория. Это означает, что фазовые траектории не пересекаются между собой;
2) при
 координата x1 должна возрастать,
поэтому в верхней фазовой полуплоскости
при возрастании времени t изображающая
точка движется слева направо. Соответственно
в нижней полуплоскости движение
происходит справа налево. Направление
движения на траекториях показывают
стрелками;
координата x1 должна возрастать,
поэтому в верхней фазовой полуплоскости
при возрастании времени t изображающая
точка движется слева направо. Соответственно
в нижней полуплоскости движение
происходит справа налево. Направление
движения на траекториях показывают
стрелками;
3) в точках, где x2 = 0 и F(x1,x2) не равно 0, фазовые траектории пересекают ось абсцисс под прямым углом. Ось ординат фазовые траектории могут пересекать под любым углом.
Завдання до роботи
1. Построить виртуальный лабораторный стенд для исследования нелинейной системы автоматического управления методом фазовой плоскости. В таблице 7.1 заданы соответственно вариантам передаточные функции линейной части системы и статические характеристики нелинейных элементов.
2. Получить статическую характеристику и фазовый портрет нелинейной системы при однозначной статической характеристике и неоднозначной статической характеристике нелинейного элемента.
3. Сделать вывод об устойчивости нелинейной системы автоматического регулирования.
4. Получить фазовый портрет нелинейной системы в MathCad.