

Синтез кривошипно-кулісних механізмів
Приклад 2.1.4 Вихідні дані: коефіцієнт
зміни середньої швидкості k![]() довбача, відстань lAС,
хід НЕ довбача і максимально
допустимий кут
довбача, відстань lAС,
хід НЕ довбача і максимально
допустимий кут
![]() тиску.
Визначити: lСD,
lDЕ,
і l0, (рисунок
2.4) .
тиску.
Визначити: lСD,
lDЕ,
і l0, (рисунок
2.4) .
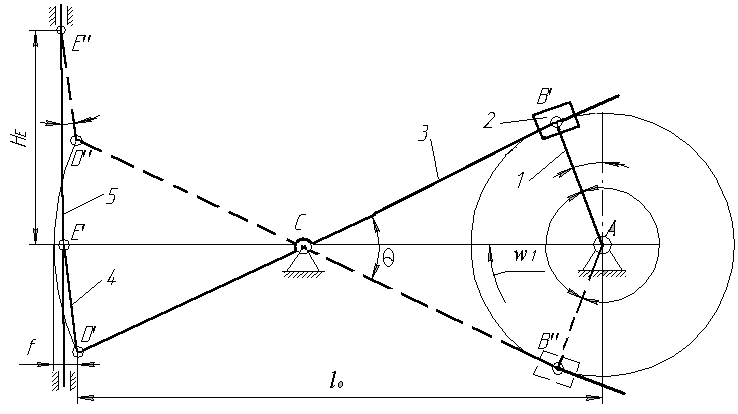
Рисунок 2.4 – Синтез важільного механізму з хитною кулісою
При відомому k знаходимо кут хитання куліси
![]() .
(2.1.7)
.
(2.1.7)
Знаходимо довжину кривошипа
![]() .
(2.1.8)
.
(2.1.8)
З чотирикутника DDEE, який є паралелограмом, знаходимо lDD =HE;
![]() .
(2.1.9)
.
(2.1.9)
З метою зменшення кута тиску
![]() напрямну
п’ятої ланки необхідно розмістити так,
щоб вона ділила стрілу f
пополам, тоді
напрямну
п’ятої ланки необхідно розмістити так,
щоб вона ділила стрілу f
пополам, тоді
l0=
lAC
+
lCDcos(![]() )+f
/2,
(2.1.10)
)+f
/2,
(2.1.10)
де
![]() .
.
Довжина шатуна 4 виражається через
заданий допустимий кут тиску
![]() .
.
![]() .
(2.1.11)
.
(2.1.11)
Приклад
2.1.5 Вихідні дані: довжина l1
= lAB,
кривошипа, хід Н повзуна 5; коефіцієнт
зміни його середньої швидкості k![]() .
Визначити: lAС,
lСD,
lDE.
.
Визначити: lAС,
lСD,
lDE.
Знаючи
k![]() ,
визначаємо кут перекриття
,
визначаємо кут перекриття
![]() .
(2.1.12)
.
(2.1.12)
Відстань l0 = lAС між осями обертання кривошипа 1 і куліси 3 із АВС визначається за формулою
![]() .
(2.1.13)
.
(2.1.13)
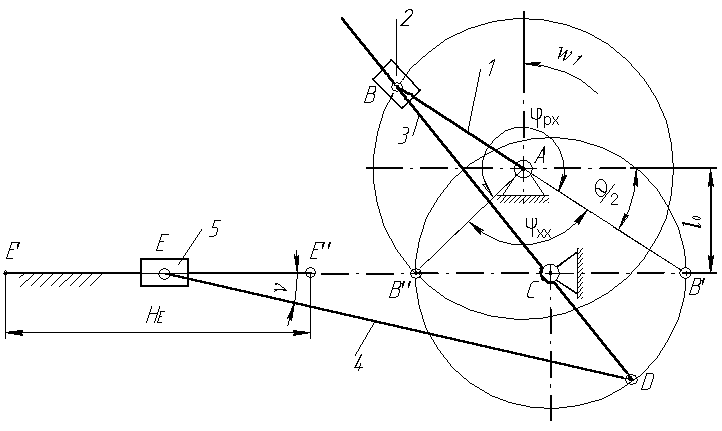
Рисунок 2.5 – Синтез важільного механізму з обертовою кулісою
Крайні положення точки Е повзуна (Е і Е), коли напрями куліси 3 і шатуна 4 збігаються. Тому довжина кривошипа CD:
![]() .
(2.1.14)
.
(2.1.14)
Довжина шатуна вибирається із умови
щоб максимальна величина кута тиску
![]() не
перевищувала допустимого значення
не
перевищувала допустимого значення
![]() доп,
тому
доп,
тому
![]() .
(2.1.15)
.
(2.1.15)
Приклади геометричного синтезу інших типів важільних механізмів розглянуті в рекомендованій до курсового проекту літературі [2,5].
2.2 Кінематичне дослідження важільних механізмів
Основними задачами кінематичного дослідження є визначення положень ланок механізму та його окремих точок, їх траєкторій, швидкостей і прискорень.
Ці задачі можуть бути вирішені графічним, графоаналітичним і аналітичним способами.
2.2.1. Побудова планів положень ланок механізму
Планом положень механізму називають графічне зображення кінематичної схеми механізму, що відповідає певному положенні початкової ланки, у вибраному масштабі (доцільно приймати один із стандартних масштабів М1:1; 2:1; 2,5:1 і т.д. або 1:2; 1:2,5; 1:4 і т.д.). Стандартний масштаб в теорії машин і механізмів записується за допомогою масштабного коефіцієнта довжини.
Масштабний коефіцієнт довжини –
відношення натурального розміру в
метрах до відрізка на кресленні в мм,
який зображає цей розмір. Таким чином,
масштабу М1:1 відповідає масштабний
коефіцієнт
![]() ,
масштабу М1:2 -
,
масштабу М1:2 -
![]() і т.д.
і т.д.
Для побудови плану положень повинні бути задані: кінематична схема механізму, закон руху ведучої ланки.
При виконанні курсового проекту план механізму будується для дванадцяти його положень. При цьому за нульове положення механізму приймається таке, при якому вихідна ланка (до якої прикладена сила корисного опору або рушійна сила) знаходиться в одному з її крайніх положень. Побудова положень всіх інших ланок механізму виконується методом засічок.
Більш детально побудова плану положень механізму розглянута в прикладі оформлення курсового проекту (додаток Ж).