

-
Особенности моделирования в научном познании
Целью познания является синтез моделей, отражающих важную для человека специфику объектов (систем) окружающего мира. Эта специфика отражается в своеобразии причинно-следственных связей каждого объекта или явления, которые удобно представить в виде некоторого «преобразователя» причины в следствие. Описание «работы» этого преобразователя на каком-либо языке и называют моделью. Таким образом, под моделью подразумевают рассуждения на любом языке – математическом, графическом, алгоритмическом, разговорном и т.д., позволяющие имитировать наблюдаемое явление, т.е., например, эффективно предсказывать его следствия по причинам.
Конкретные цели конкретизируют язык, на котором описывается модель. Языком большого числа моделей является математика.
Обозначим причину – X, а следствие – Y. Связь между ними запишем условно в виде Y = F(Х), где F – правило преобразования причины Х в следствие Y. Это и есть модель. Назовём F оператором модели.
Вопрос об использовании полученных моделей в процессе познания не ставится. Эти модели синтезируются «впрок». Познавательные модели представляют собой наиболее широкий класс моделей. Существенной особенностью этих моделей является отражение механизма объекта или явления в структуре оператора F, т.е. отражение всех важных причинно-следственных связей, имеющихся у объекта. При неучёте этих связей познавательная сторона модели значительно пострадала бы, так как для познания необходимо знать не только как, но и почему это происходит.
2.4 Особенности моделирования в решении прикладных задач
Важнейшими из прикладных задач являются задачи оптимального, т.е. наилучшего управления техническими системами.
Моделирование является важнейшим разделом науки об оптимальном управлении сложными системами – кибернетики.
Создателем кибернетики по праву считают американского математика Норберта Винера (1894 – 1964г. г.).
Сформировалось специальное направление – техническая кибернетика, т.е. наука об управлении техническими системами. К её фундаментальным принципам относят:
-
системный анализ;
-
моделирование;
-
формализацию задач оптимального управления.
На рис. 2.3 приведена принципиальная схема технической системы (ТС), являющейся объектом оптимального управления.
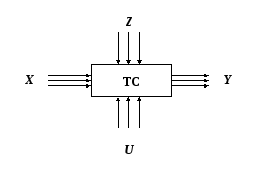
X – входные параметры, они могут быть измерены, но возможность на них воздействовать отсутствует, их значение не зависит от режима процесса.
U – управляющие переменные, на них можно оказывать прямое воздействие, что позволяет управлять техническими системами.
Z – возмущающие переменные. Их значения изменяются случайным образом. Их нельзя измерить.
Y – выходные переменные, их величина определяется режимом процесса, они характеризуют состояние системы, возникающее в результате суммарного воздействия X, U, Z.
Рис. 2.3 Схема технической системы как объекта
Оптимального управления
X и U по отношению к ТС – внешние параметры или переменные, Y – внутренние, Z – могут быть и внутренними и внешними.
Для детерминированных систем параметры состояния однозначно определяются значениями X и U, Z – отсутствуют. Можно записать, что Y = F(Х, U).
Для стохастических систем влияние случайных возмущающих параметров Z велико.
В рамках кибернетики сформулированы следующие принципы.
1. Изоморфизм (см. выше).
2. Обратная связь. Для всех сложных систем необходимым условием является обратная связь, передающая в органы управления сигнал о достигнутом результате в объекте управления.
3. Управление воздействием на главный фактор. Чаще всего на управляемый объект (процесс) действует несколько входных величин. Выходная величина (например, показатель качества) является результатом действия многих факторов, в том числе случайных, неизвестных нам или не поддающихся нашему контролю. Т.е. на практике мы управляем объектами почти всегда в условиях неполной информации. Но управление в этих условиях возможно, и оно может быть эффективным, если мы воздействуем на главный фактор.
4. Разделение целого на системы. Управляемый объект всегда можно рассматривать как состоящий из относительно независимых друг от друга подсистем.
5. Иерархия управления. Под иерархией понимается многоступенчатое управление, характерное и для живых организмов, и для производственных систем. Обычно нижние ярусы управления отличаются большей скоростью реакций. Они быстрее перерабатывают поступающие сигналы, поскольку их задачи отличаются меньшей неопределённостью. Т.е. на нижних уровнях задачи более простые.
6. Статистико-вероятностный принцип. Этот принцип не означает, что управляемых объектов много. Наука управления признаёт объективность случайности. Т.е. управляемый объект – даже если он один – никогда не следует «приказам» управляющего объекта со 100%-ной вероятностью или с абсолютной точностью.
7. Математические методы и модели. Этот принцип позволяет строить математическую модель управляемого объекта, являющуюся его изоморфным отображением. Он позволяет на модели (обычно с помощью ЭВМ) проанализировать возможные результаты того или иного управляющего воздействия на систему.
Модель, синтезированная для потребностей управления, может не отражать внутренних механизмов явления. Ей достаточно лишь констатировать наличие определённой формальной связи между входами и выходом объекта оптимального управления, характер и особенности этой связи.