3.1 Визначення сил тяжіння інерції, інерція та моменти сил інерції
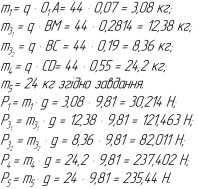
Визначаємо сили тяжіння (P) ланок для положення 3 за формулою:

де m – маса ланок механізму;
g – прискорення вільного падіння.

де q – лінійна густина ланок, кг/м
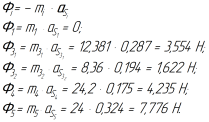
Визначаємо сили інерції (Ф) та моменти сил інерції (Мін) для положення 3, які пропорційні прискоренням ланок та напрямлені протилежно векторам лінійних прискорень центрів мас aS та напрямків кутових прискорень ε за формулами:

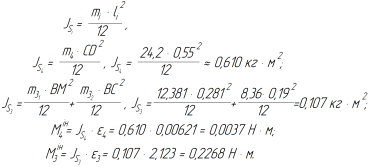
де JSi – момент інерції ланки відносно центра мас, визначається за формулою:
Сили інерції (Ф) та моменти сил інерції (Мін) для положення 9 визначаємо аналогічно, значення наведені у таблиці 3.1.
Таблиця 3.1
Значення сил інерції та моменти сил інерції
|
Позначення |
Положення механізму |
|||
|
3 |
9 |
|||
|
|
Ф1 , Н |
0 |
0 |
|
|
|
Ф31 , Н |
3,554 |
39,036 |
|
|
|
Ф32 , Н |
1,622 |
17,781 |
|
|
|
Ф4 , Н |
4,235 |
7,356 |
|
|
|
Ф5 , Н |
7,776 |
105,912 |
|
|
|
Мін3 , Нм |
0,2268 |
0,2575 |
|
|
|
Мін4 , Нм |
0,0037 |
0,0475 |
|
|
|
P1 , Н |
30,214 |
30,214 |
|
|
|
P31 , Н |
121,463 |
121,463 |
|
|
|
P32 , Н |
82,011 |
82,011 |
|
|
|
P4 , Н |
237,402 |
237,402 |
|
|
|
P5 , Н |
235,44 |
235,44 |
|
3.2. Силовий розрахунок механізму
Креслимо у положенні 3 кінематичну схему механізму (див. аркуш 2) і у відповідних точках прикладаємо всі зовнішні сили.
Розбиваємо механізм на структурні групи, який складається з механізму класу і двох груп класу, які складаються з ланок 2,3 та 4,5.
3.2.1. Силовий розрахунок групи 4-5
Креслимо окремо структурну групу 4-5 у цьому ж положенні і масштабі, що і кінематична схема (див. аркуш 2), та прикладаємо до неї усі зовнішні сили (Fріз. , P4 , P5 ), включаючи сили інерції (Ф4 , Ф5 ) і момент сили інерції (Мін4), замінюємо реакціями R34 і R05.
Розкладемо реакцію R34 на дві складові Rn34 і R34 :

Нормальну складову Rn34 направимо вздовж ланки CD, а дотичну R34 – перпендикулярно до цієї ланки.
Згідно з принципом Д’Аламбера складаємо векторне рівняння рівноваги структурної групи, що складається з ланок 4 і 5:

Складемо рівняння моментів відносно точки D для ланки 4:

З рівняння знайдемо R34 :
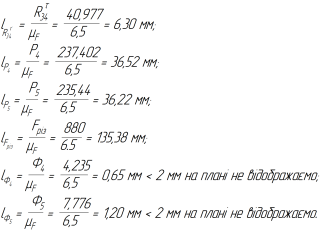
Знайдемо масштабний коефіцієнт плану сил:

Визначимо довжини відрізків: