

-
Оптимизация сбора и передачи данных
Указанные недостатки можно устранить. Оптимизация базового протокола подразумевает, что датчики выполняют переход из одного состояния в другое в отдельном таймслоте, а не в таймслоте с отправкой сообщения. В этом случае достигается следующие положительные эффекты:
– увеличение объема полезной информации, отправляемой датчиком в УСД в одном таймслоте;
– увеличение количества датчиков в системе.
Однако существуют и недостатки: при большом количестве датчиков в системе повышается вероятность появления ошибки, так как отправка сообщения датчиками занимает почти весь таймслот, что приводит к наложению друг на друга смежных процессов отправки сообщений от различных датчиков при опережении счетчика таймера одного из МК. Данное явление вызывает коллизию, что требует ограничения числа датчиков; использование нескольких таймслотов для дополнительных согласующих действий, не связанных с отправкой полезной информации.
Временная диаграмма оптимизированного протокола передачи данных приведена на рисунке 5.
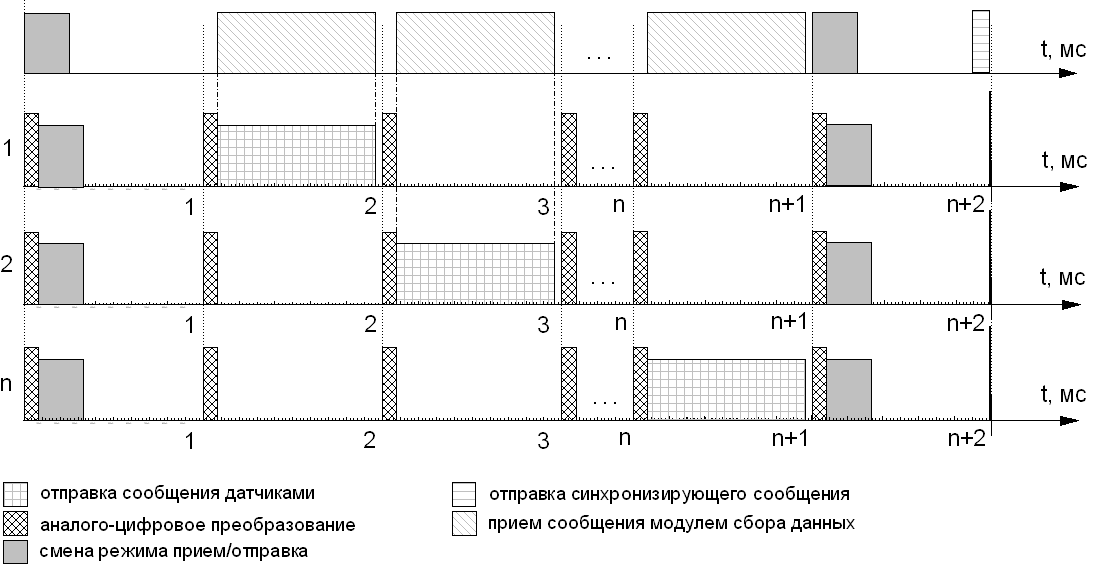
Рисунок 5 – Временная диаграмма оптимизированного протокола передачи данных
Далее приводятся результаты расчета характеристик подсистемы сбора данных с датчиков на основе оптимизированного протокола. Это позволит определить, при каких условиях подсистема будет без ошибок передавать сообщения от датчиков к УСД при существовании разбросов времени во внутренних таймерах МК датчиков.
Известно, что в беспроводных сетях данного типа от ошибок передачи сообщений избавляются синхронизацией датчиков, [144, 146, 147]. Расчёт характеристик сети и поиск оптимального количества синхронизаций между отправками сообщений на основе предложенной архитектуры протокола можно провести на основании следующих характеристик: объем данных, передаваемых от датчика к УСД согласно формату пакета (см. рис. ) и 2 байта, накопленных датчиком до и после синхронизации,
V[send] = (9 + 3 + n + 2) * 8 [бит];
период оправки данных – T = n+2 [мс]; n – количество датчиков ПВ.
Инкремент времени в датчиках происходит каждый K = 8000-й такт МК. Максимальное отклонение МК датчиков от средней частоты E[CPU] = 1,25 % при частоте МК F[CPU] = 8 МГц. Тогда, максимальное время, на которое могут отклониться таймера МК датчиков за одну секунду:
T[E] = [((F[CPU] + (F[CPU] x E[CPU]) )/K) – (F[CPU]/K)]·[K·(1/F[CPU])] = 0,0125 с,
при этом (F[CPU] + (F[CPU]·E[CPU]))/K – количество итераций инкремента таймера МК при ошибке счётчика за 1 сеунду; F[CPU]/K – количество итераций инкремента таймера без ошибки счётчика за 1 секунду; K·(1/F[CPU])] – время между итерациями [сек].
Также можно определить максимальное количество датчиков в сети, работающей без накопления времени отклонения таймеров датчиков. Данные от одного датчика отправляются УСД только в одном таймслоте, что накладывает ограничения на расчёт максимального количества датчиков. Время отправки определяется согласно выражению: T[send] <= 1000 – T[АЦП] [мкс]. Из выражения получается, что n <= 101. Следовательно, в сети с данной архитектурой можно использовать максимум до 101 датчика.
Для того чтобы исключить ошибку совместной работы датчиков, которая обусловлена разбросом времени счётчика таймера МК, надо рассчитать максимальное допустимое время, на которое могут отклониться датчики, не теряя работоспособности подсистемы. Это время определяется следующим образом:
T[Emax] = T[АЦП] + (1000 – T[send] – T[АЦП]), [мкс];
т.е. T[Emax] = 1000 – (14 + n)*8. При максимальном количестве датчиков получается: T[Emax] = 80 мкс.
Можно определить максимальное количество таймслотов между синхронизациями: N[TS] = n + 2 при ограничении: T[Emax] >= T[E] · n. Из ограничения следует, что n <= 43,31. Тогда можно приянть N[TS] = 45. Если ошибка E[CPU] является переменной, то последнее выражение имеет следующий вид: N[TS] <= 888/(8 + E[CPU]*1000) + 2. Таким образом, получена оценка максимального количества таймслотов между синхронизациями в сети с архитектурой на основе предложенного протокола с оптимизированными характеристиками в рамках подсистемы сбора данных с датчиков – N[TS] = 45; максимальное число датчиков – 101.