

-
Протокол, как главная составляющая анализа измерительной системы реального времени
При внедрении предложенной модели крайне важной является оценка возможности работы системы дистанционного сбора информации в режиме реального времени. В работе [1] показано, что основным параметром такой оценки выступает своевременность, включающая в себя параметры актуальности и временной предсказуемости.
С позиций теории систем реального времени (СРВ) [2] далее под актуальностью работы системы дистанционного сбора информации понимается то, что любые данные, поступающие с первичных преобразователей измеряемого сигнала, в текущий момент времени должны быть последними и соответствовать текущему состоянию объекта управления. Тогда временная предсказуемость при сборе данных заключается в том, что в каждый последующий момент времени информационная система должна знать, какие операции по передаче/приему данных будут выполняться на следующем этапе, за какое время осуществляется передача/прием данных между узлами системы.
Широко распространенные на сегодняшний день алгоритмы и протоколы передачи данных (описанные в стандартах IEEE 802.3, IEEE 802.11 и т.д.) не могут функционировать в режиме реального времени.
Поэтому предлагается использовать следующий эффективный алгоритм сбора данных, реализованный временной диаграммой работы локально синхронизированных беспроводных сетей с доступом узлов сети к радиоканалу, синхронизированному во времени, [3]. Синхронный доступ к радиоканалу позволяет сократить потребление энергии, продлевая срок автономной работы передатчиков МР. При этом вводятся следующие ограничения: рассматривается взаимодействие элементов сети только на канальном уровне; некоторые параметры сети не берутся во внимание в связи с их малой значимостью.
Ниже более подробно рассматривается алгоритм функционирования подсистемы сбора данных. Комплекс регистрации параметров объектов управления состоит из нескольких узлов: датчиков, установленных на МР или объектах управления, и одного узла синхронизации данных (УСД). Датчики выполняют следующие функции: обработка поступающего сигнала путём аналого-цифрового преобразования (АЦП); сохранение данных от АЦП в памяти МР; отправка накопленных данных в УСД; сброс таймера установленного в датчике микроконтроллера (МК) для синхронизации с системой.
Ниже выделены основные параметры измерительной подсистемы МР: время отправки оцифрованной накопленной измерительной информации, отсчитываемое от момента синхронизации системы; уникальный идентификатор датчика, который добавляется в сообщение УСД; время АЦП.
УСД выполняет следующие функции: приём сообщений от датчиков и последующая отправка данных в локальный центр управления; отправка сообщения датчикам, которое приводит к инициализации функции сбрасывания таймеров датчиков.
Для оценки параметров протокола была сконструирован экспериментальный стенд. На основе модели дискретизации тестовых сигналов предложены следующие допустимые характеристики аппаратного обеспечения: скорость передачи сообщений в системе – 1 Мбит/с; расстояние между узлами системы 10 метров; частота дискретизации – 1 кГц. Временные характеристики компонентов аппаратного обеспечения в аспекте сетевого взаимодействия приведены в таблице 2.
Таблица 2 – Временные характеристики подсистемы сбора данных
|
Наименование |
Обозначение |
Значение |
|
Время перехода беспроводного модуля из состояния чтения сообщения в состояние отправки и наоборот |
T[Tx] = T[Rx] |
250 мкс |
|
Время АЦП |
T[АЦП] |
80 мкс |
|
Время сброса таймеров датчиков после получения ими синхронизирующего пакета |
T[reset] |
7 мкс |
|
Время отправки синхропакета |
T[sync] |
104 мкс |
|
Объём данных результата одного АЦП |
V[АЦП] |
1 байт |
|
Частота МК датчиков |
F[CPU] |
8 МГц |
|
Максимальный разброс частот МК |
E[CPU] |
1,25% |
При передаче данных в системе используются сообщения двух типов. Сообщение первого типа содержит данные АЦП и отправляется МР в УСД. Данное сообщение содержит следующие поля: заголовок сообщения, размер сообщения, сетевой адрес узла – датчика, индекс сообщения, данные АЦП, контрольная сумма. Формат сообщения представлен на рисунке 2.

Рисунок 2 – Формат сообщения, отправляемого МР
Объем оцифрованных данных определяется согласно выражению:
n = [Количество АЦП между отправками сообщений] * V[АЦП].
Сообщение второго типа используется для синхронизации датчиков и передается УСД в широковещательном режиме с целью контроля отправки сообщений от МР в заданное время. Содержит следующие поля: заголовок сообщения, содержимое пакета (команда синхронизации), контрольная сумма. Формат сообщения представлен на рисунке 3.

Рисунок 3 – Формат синхронизирующего сообщения
Процессы внутри измерительных узлов протекают в соответствии со следующими возможными задачами: переход из состояния отправки в состояние приёма сообщений; переход из состояния приёма в состояние отправки сообщений; АЦП сигнала датчиками; сброс таймеров в МК датчиков.
Временная диаграмма, иллюстрирующая работу базового протокола передачи данных от датчиков к УСД, приведена на рисунке 4. На рисунке сверху показана ось времени с обозначением режимов работы УСД. Следующие временные оси 1...n иллюстрируют работу датчиков, установленных на МР. Отсчеты на осях времени 1...n являются разделенными временными интервалами – таймслотами.
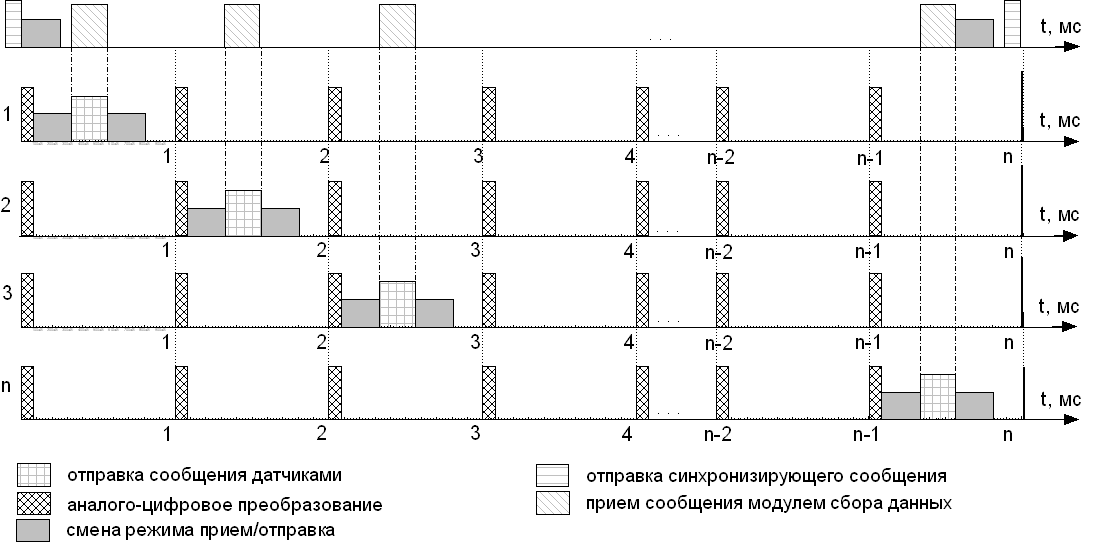
Рисунок 4 – Временна диаграмма базового протокола сбора данных с датчиков
Очевидны следующие достоинства данной архитектуры:
– полная занятость всех таймслотов для отправки данных от датчиков к УСД;
– низкая вероятность возникновения ошибки при отправке пакетов, так как переход модуля беспроводной передачи из режима приема в режим передачи и обратно осуществляется в одном таймслоте. Время смены режима до и после отправки занимает 50 % таймслота, что гарантирует защиту от одновременной отправки сообщений несколькими датчиками.
Однако имеются недостатки: малый объём полезной информации, отправляемый в сообщении; малое возможное количество датчиков в сети, так как значительно ограничено время передачи измерительной информации одним датчиком в соответствующем таймслоте.