

4.6.5. Цифровые устройства накопления радиолокационных эхо-сигналов
При цифровой обработке радиолокационных сигналов выборки сигнала, подлежащего обработке, преобразуются в цифровую форму – в числа, представленные в виде определенного кода. Как правило, чаще всего используется двоичный цифровой код.
Несомненным достоинством цифровых устройств является то, что их параметры не подвержены дестабилизирующему воздействию окружающей среды. Благодаря этому решается сложная проблема создания высокостабильной и длительной задержки сигналов. Кроме того, цифровая аппаратура в процессе эксплуатации не требует настройки, так как все весовые функции, используемые при вычислениях и все задержки сохраняют заранее выбранные значения в течении любого сколько угодно большого времени.
Вместе с тем цифровое преобразование сигналов приводит к частичной потере информации, что делает цифровые алгоритмы обработки квазиоптимальными. Обработка сигналов в цифровых фильтрах сопровождается образованием дополнительных шумов, обусловленных необходимостью квантования сигналов (шум квантования) и неизбежного округления чисел при проведении вычислений (шум округления).
Однако перспективность использования методов цифровой обработки сигналов несомненна, поскольку реально достижимая эффективность цифровых систем более высокой, чем аналоговых.
Цифровые
накопители могут применяться как в
когерентных, так и не когерентных РЛС.
В данном пункте рассмотрим некогерентные
цифровые накопители. При преобразовании
сигнала с выхода амплитудного детектора
в цифровую форму с помощью АЦП первой
производится операция временной
дискретизации. Шаг дискретизации
выбирается, как правило, равным
длительности импульса сигнала нВ выходе
АД. Соответственно период следования
![]() зондирующих сигналов разбивается на
зондирующих сигналов разбивается на
![]() равных интервалов (дискрет дальности).
Таким образом, разрешение по времени
не может быть меньше
равных интервалов (дискрет дальности).
Таким образом, разрешение по времени
не может быть меньше
![]() ,
а разрешение по дальности
,
а разрешение по дальности
![]() .
.
Вторым
этапом преобразования аналогового
квантового по времени сигнала является
операция амплитудного квантования. При
многоуровневом амплитудном квантовании
число разрядов
![]() двоичного кода, характеризующего
амплитуду сигнала, связано с числом
уровней квантования
двоичного кода, характеризующего
амплитуду сигнала, связано с числом
уровней квантования
![]() соотношением
соотношением
![]() ,
где
,
где
![]() - ближайшее целое число, не меньше
- ближайшее целое число, не меньше![]() .
.
Образованная
в АЦП последовательность
![]() - разрядных двоичных чисел (цифровой
эквивалент аналогового сигнала) с
интервалом
- разрядных двоичных чисел (цифровой
эквивалент аналогового сигнала) с
интервалом
![]() поступает в блок памяти (БП1) или
оперативное запоминающее устройство
(ОЗУ) (рис.4.41), выполняющее те же функции,
что и линии задержки в аналоговом
накопителе видеоимпульсов. Числа входной
последовательности хранятся в БП1 в
течение времени
поступает в блок памяти (БП1) или
оперативное запоминающее устройство
(ОЗУ) (рис.4.41), выполняющее те же функции,
что и линии задержки в аналоговом
накопителе видеоимпульсов. Числа входной
последовательности хранятся в БП1 в
течение времени
![]() ,
после чего сбрасываются. Заметим, что
число ячеек памяти в БП1 должно быть
равным числу дискрет дальности, а число
разрядов в каждой ячейке должно быть
,
после чего сбрасываются. Заметим, что
число ячеек памяти в БП1 должно быть
равным числу дискрет дальности, а число
разрядов в каждой ячейке должно быть
![]() .
АЦП и БП1,2 управляются тактовыми
импульсами от единого генератора системы
синхронизации. Период повторения
тактовых импульсов равен длительности
импульса сигнала
.
АЦП и БП1,2 управляются тактовыми
импульсами от единого генератора системы
синхронизации. Период повторения
тактовых импульсов равен длительности
импульса сигнала
![]() .
.
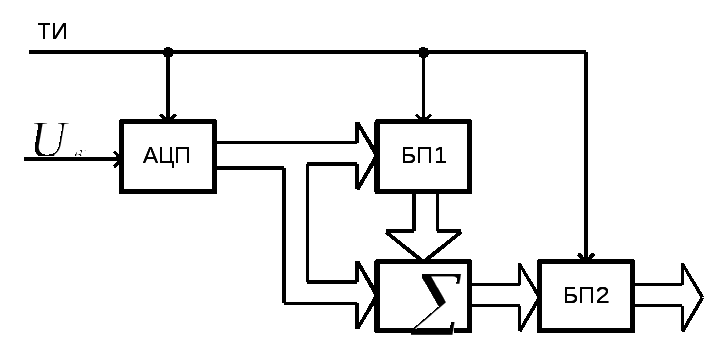
Рис.4.41. Структурная схема цифрового многоразрядного накопителя сигналов
В
каждом такте работы устройства, подобно
отводам линии задержки аналогового
накопителя, из БП1 извлекаются
![]() чисел (записанных в БП1 с интервалом
времени
чисел (записанных в БП1 с интервалом
времени
![]() ),
которые совместно с очередным отсчетом
входного потока поступают в сумматор.
Все эти числа соответствуют одному и
тому же
),
которые совместно с очередным отсчетом
входного потока поступают в сумматор.
Все эти числа соответствуют одному и
тому же
![]() -му
элементу разрешения по дальности. (На
ри.4.41 двойными стрелками показана
многоразрядная связь. При этом число
линий связи между БП1 и сумматором должно
быть в
-му
элементу разрешения по дальности. (На
ри.4.41 двойными стрелками показана
многоразрядная связь. При этом число
линий связи между БП1 и сумматором должно
быть в
![]() раз больше, чем между АЦП и сумматором,
что указано более широкой стрелкой).
Полученная сумма записывается в следующем
БП2 также в свои ячейки памяти,
соответствующие дискретам дальности.
Заметим, что разрядность сумматора и
ячеек памяти БП2 должна быть больше, чем
БП1, так как при суммировании амплитуда
сигнала, выражается числом, возрастает.
Далее полученная сумма для каждого
дискрета дальности и в каждом периоде
следования сравнивается с порогом и,
если превышается, то принимается решение
о наличии сигнала в
раз больше, чем между АЦП и сумматором,
что указано более широкой стрелкой).
Полученная сумма записывается в следующем
БП2 также в свои ячейки памяти,
соответствующие дискретам дальности.
Заметим, что разрядность сумматора и
ячеек памяти БП2 должна быть больше, чем
БП1, так как при суммировании амплитуда
сигнала, выражается числом, возрастает.
Далее полученная сумма для каждого
дискрета дальности и в каждом периоде
следования сравнивается с порогом и,
если превышается, то принимается решение
о наличии сигнала в
![]() -ом
элементе разрешения. При этом одновременно
фиксируется время запаздывания сигналов
-ом
элементе разрешения. При этом одновременно
фиксируется время запаздывания сигналов
![]() и дальность до цели
и дальность до цели
![]() .
.
Схема
обработки сигналов (рис.4.41) вследствие
многоуровнего квантования сигналов по
амплитуде (![]() разрядов
двоичного числа) и необходимости
хранения сигнала
разрядов
двоичного числа) и необходимости
хранения сигнала
![]() периодов следования требует большой
памяти БП1
периодов следования требует большой
памяти БП1
![]() элементарных узлов памяти для каждого
элементарных узлов памяти для каждого
![]() -го
элемента разрешения по дальности.
-го
элемента разрешения по дальности.
При
бинарном квантовании
![]() квантованный сигнал может принимать
одно из двух значений – 0 или 1 (при
обработке после амплитудного
детектирования). Потери в отношении
сигнал/шум составляет порядка 2 дБ по
сравнению с многоуровневым квантованием.
квантованный сигнал может принимать
одно из двух значений – 0 или 1 (при
обработке после амплитудного
детектирования). Потери в отношении
сигнал/шум составляет порядка 2 дБ по
сравнению с многоуровневым квантованием.
Бинарный квантователь представляет собой пороговое устройство. Если выходное напряжение АД превышает порог, то квантованному сигналу присваивается значение 1 и на соответствующем интервале дискретизации создается стандартный импульс или в противном случае импульс отсутствует (рис.4.42).
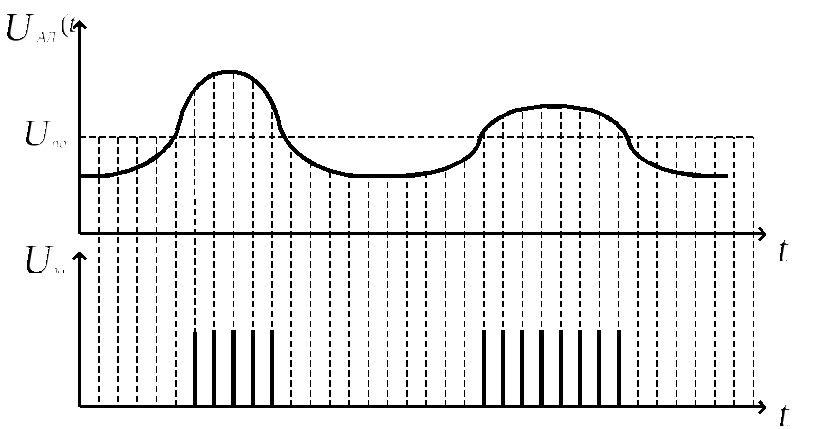
Рис.4.42. Структура сигналов в бинарном квантователе
Таким
образом, бинарно-квантованный сигнал
представляет собой последовательность
нулей и единиц, и построение обнаружителя
существенно упрощается (рис.4.43). Устройство
памяти представляет собой регистр с
числом ячеек
![]() для каждого элемента дальности. Функции
сумматора и порогового устройства
выполняет комбинационная логическая
схема, которая представляет собой схему
совпадения «
для каждого элемента дальности. Функции
сумматора и порогового устройства
выполняет комбинационная логическая
схема, которая представляет собой схему
совпадения «![]() из
из![]() ».
».
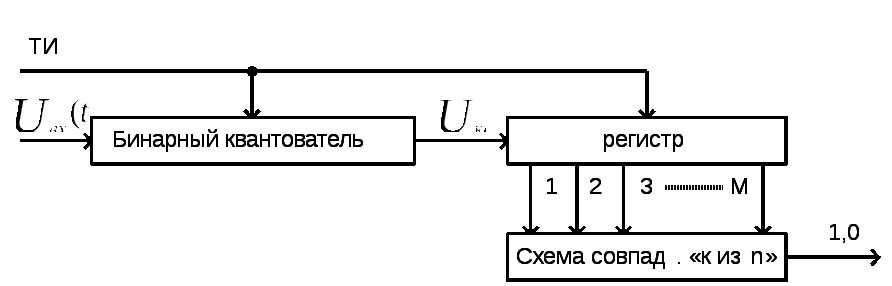
Рис.4.43. Структурная схема обнаружителя бинарно-квантованых сигналов
Максимальное
число единиц (импульсов), поступающих
с регистра на схему совпадения в некотором
шаге дискретизации по времени, не
превышает числа импульсов в пачке![]() .
Число
.
Число
![]() выбирается, как правило, меньше
выбирается, как правило, меньше
![]() .
Если величина порога
.
Если величина порога
![]() <
<![]() ,
например, логика 3 из 5, то схема совпадения
принимает решение о наличии сигнала
каждый раз, когда на ее входы поступает
,
например, логика 3 из 5, то схема совпадения
принимает решение о наличии сигнала
каждый раз, когда на ее входы поступает
![]() или больше импульсов одновременно. На
выходе схемы в случае наличия сигнала
появится стандартный импульс 1, либо 0
в противном случае.
или больше импульсов одновременно. На
выходе схемы в случае наличия сигнала
появится стандартный импульс 1, либо 0
в противном случае.
Преимущество данной схемы по сравнению с накопителем рис.4.41 существенно меньшее число связей между элементами схемы, а также значительно меньший требуемый объем памяти.
Значительно меньших аппаратурных затрат требует квазиоптимальный накопитель – цифровой рециркулятор (рис.4.44) по сравнению со схемой накопителя (рис.4.41). Он представляет собой накапливающий сумматор, в цепи обратной связи которого включен ослабитель с коэффициентом передачи
![]() ,
,
где
![]() - натуральное число, определяемое для
пачки с прямоугольной огибающей из
условия
- натуральное число, определяемое для
пачки с прямоугольной огибающей из
условия
![]() .
.
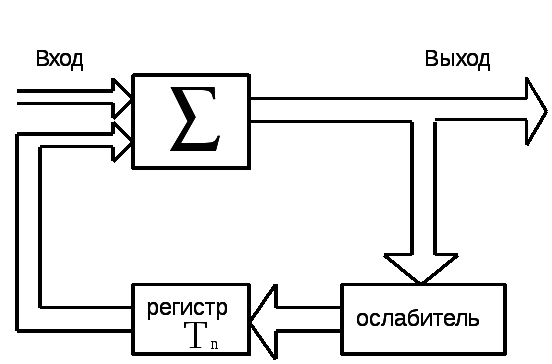
Рис.4.44. Структурная схема цифрового рециркулятора
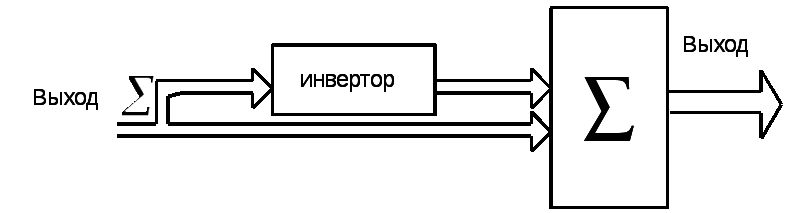
Рис.4.45. Структурная схема ослабителя
Выбор
значения коэффициента обратной связи
![]() не приводит к существенному увеличению
потерь в рециркуляторе и позволяет
избежать необходимости применения
умножителя в цепи обратной связи
рециркулятора. (Операция умножения при
цифровой обработке сигналов требует
значительных аппаратурных затрат). При
таком значении
не приводит к существенному увеличению
потерь в рециркуляторе и позволяет
избежать необходимости применения
умножителя в цепи обратной связи
рециркулятора. (Операция умножения при
цифровой обработке сигналов требует
значительных аппаратурных затрат). При
таком значении
![]() сигнал
на выходе ослабителя представляется в
виде
сигнал
на выходе ослабителя представляется в
виде
![]() . (*)
. (*)
Деление
выходного сигнала сумматора на
![]() осуществляется сдвигом кода делимого
на
осуществляется сдвигом кода делимого
на
![]() разрядов в право. Поэтому операцию (*)
можно выполнить с помощью сумматора,
на один вход которого поступает код
сигнала
разрядов в право. Поэтому операцию (*)
можно выполнить с помощью сумматора,
на один вход которого поступает код
сигнала
![]() ,
а на второй – обратный код сигнала
,
а на второй – обратный код сигнала
![]() со сдвигом на
со сдвигом на
![]() разрядов вправо (рис.4.45).
разрядов вправо (рис.4.45).
Для исключения перегрузки рециркулятора (переполнения разрядной сетки) и обеспечения защита от несинхронных импульсных помех (НИП) входные сигналы рециркулятора должны подвергаться нормировке.