

1.9.2. Показатели качества распознавания
Показатели качества распознавания – это совокупность характеристик, позволяющих оценить возможности радиотехнических средств по решению задачи распознавания воздушных объектов.
К основным показателям качества распознавания воздушных объектов относятся:
-
виды и количество классов распознаваемых воздушных объектов (библиотека классов);
-
вероятность правильного распознавания класса воздушного объекта – вероятность принятия решения о принадлежности цели к одному из входящих в заданный алфавит классов при условии, что данная цель действительно относится к этому классу;
-
вероятность ошибочного распознавания класса воздушного объекта – вероятность принятия решения о принадлежности наблюдаемой цели к одному из входящих в заданный алфавит классов при условии, что данный объект в действительности относится к другому классу;
-
матрица вероятностей распознавания воздушных объектов – квадратная матрица, размерность которой совпадает с числом классов воздушных объектов, определенных заданным алфавитом (диагональные элементы представляют вероятности правильного распознавания объектов, остальные элементы – вероятности ошибочных решений распознавания);
-
дальность распознавания воздушных объектов – дальность до обнаруженного воздушного объекта, на которой обеспечивается его правильное распознавание с заданной вероятностью (дальность распознавания меньше дальности обнаружения);
-
зона распознавания воздушных объектов – область пространства наблюдения воздушного объекта, в пределах которой обеспечивается его правильное распознавание с заданной вероятностью;
-
время распознавания воздушного объекта – временной интервал, за который обнаруженный воздушный объект правильно распознается с заданной вероятностью;
-
помехоустойчивость распознавания воздушного объекта – способность средства и (или) системы распознавания обеспечивать правильное распознавание обнаруженного воздушного объекта с заданными характеристиками в условиях воздействия преднамеренных и естественных помех;
-
имитоустойчивость распознавания воздушных объектов – способность средства и (или) системы распознавания обеспечивать правильное распознавание обнаруженного воздушного объекта с заданными характеристиками в условиях имитации противником признаков распознавания (ложных);
-
разрешающая способность средства распознавания по дальности и (или) угловым координатам – это минимальное расстояние по дальности и (или) угловым координатам между воздушными объектами, при которых средство распознавания обеспечивает их правильное распознавание раздельно с заданными характеристика;
-
пропускная способность средства распознавания воздушных объектов – количество целей, правильно распознаваемых в единицу времени (напрямую зависит от времени распознавания воздушного объекта или числа имеющихся параллельных каналов распознавания).
Вероятность правильного распознавания класса ВО является основным показателем качества распознавания. Рассмотрим факторы, влияющие на этот показатель.
Предположим, что осуществляется решение задачи распознавания классов ВО по одному признаку X (например, по ЭПР цели ц), когда объект распознавания может быть отнесен к одному из двух возможных классов: класс1 – самолеты стратегической авиации (СА), класс 2 – ракета. Пусть признак класса 1 имеет плотность распределения вероятностей f1(x), а класса 2 - f2(x) (рис.1.35). выберем правило, согласно которому можно отнести ВО к одному из классов по результатам измерения признака.
По аналогии со случаем обнаружения одномерного сигнала таким правилом может быть сравнение измеренного значения Х с выбранным порогом Х0. Если Х<Х0,то ВО относится к классу 2, а если Х>Х0 – к классу 1. если Х=Х0, то необходимо продолжать измерения признака Х до тех пор, пока его значение не будет ясно определено относительно порога Х0, т.е. пока не будет принято решение о принадлежности ВО к тому или иному классу.
При распознавании возможны ошибки первого рода – ВО класса 2 принят за ВО класса 1 (с вероятностью совмещения события Р(1* 2)) и второго рода – ВО класса 1 принят за ВО класса 2 (с вероятностью совмещения события Р(2* 1)).
Условные вероятности этих ошибок определяются по следующим формулам (см. рис. 1.35):
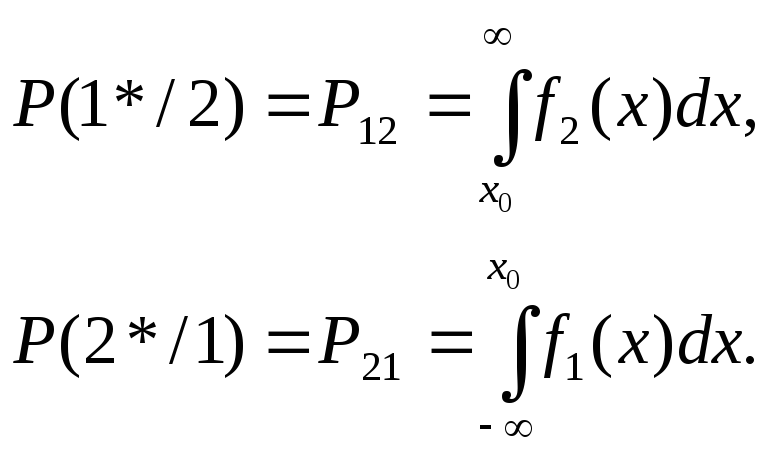
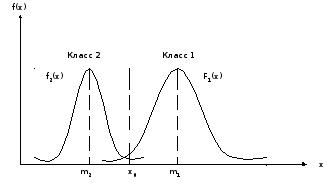
Рис.1.35 Вид плотностей распределения вероятностей параметра Х
Для выбора значения порога Х0 воспользуемся критерием минимума среднего риска
![]()
где r12 и r21 -стоимости ошибок первого и второго рода соответственно.
Заменяя
![]()
Получим
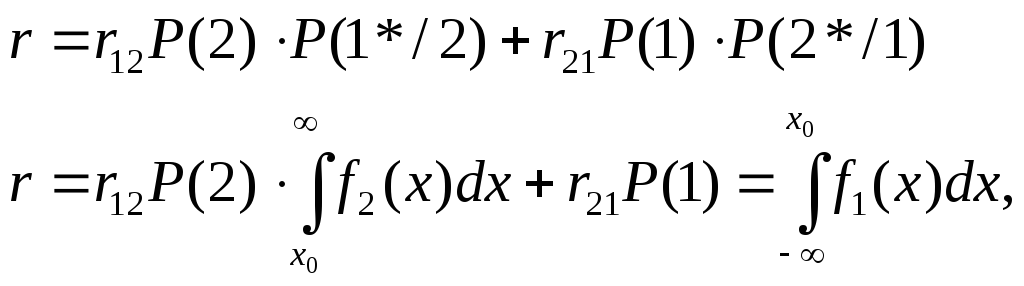
где Р(1) и Р(2) – априорные вероятности наличия в заданном пространстве ВО классов 1 и 2 соответственно.
Для определения величины Х0, при которой средний риск r минимален, продифференцируем выражение для r по Х и приравняем производную к нулю,
![]()
отсюда
![]()
Примем допущения, что Р(1)=Р(2), а r12=r21 и признак X имеет нормальный закон распределения с одинаковыми среднеквадратическими отклонениями (СКО) 0 для ВО классов 1 и 2. в этом случае получим

где m1 и m2 – средние значения параметра Х для ВО классов 1 и 2 соответственно.
Решая последнее уравнение относительно Х0, определим величину порога.
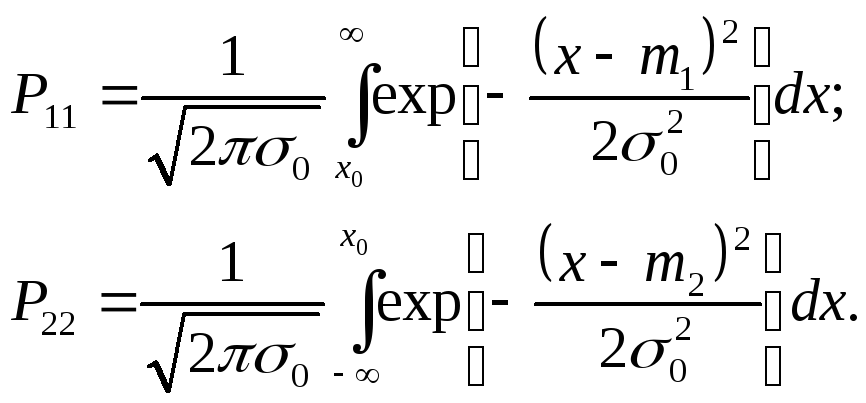
Для вычисления вероятностей правильного распознавания необходимо определить вероятности попадания измеренного признака ВО класса1 в интервал от Х0 до или признака ВО класса 2 в интервал от - до Х0:
Производя
замену переменной интегрирования
(x-m1)/0=t
и подставляя значение
![]() ,
где m1>m2
, получим
,
где m1>m2
, получим
где
![]() - интеграл вероятности, значения которого
приведены в таблицах.
- интеграл вероятности, значения которого
приведены в таблицах.
Выражение для Р11 справедливо для случая, когда распознавание производится по одиночному измерению величины признака распознавания. При n-кратном и равноточном измерении одного признака, когда 1=2=…=n=0 вероятность правильного распознавания определяется по формуле:
![]()
Из этого выражения следует, что чем больше количество измерений, тем выше вероятность распознавания.
Если распознавание производится по k независимым признакам (ценности признаков равны), то вероятность правильного распознавания может быть определена по формуле
![]()
Анализ формулы показывает, что для независимых признаков равной ценности увеличение их количества K равноценно увеличению числа n измерений одного признака.