

4.5. Радиоприемные устройства для выделения широкополосных сигналов
Широкополосными (или сложными) называются сигналы, имеющие одновременно большую длительность и широкий спектр, т.е. для которых выполняется условие:
![]()
где
![]() - база сигнала;
- база сигнала;
![]() - ширина спектра сигнала.
- ширина спектра сигнала.
Широкополосность сигнала достигается путем фазовой или
частотной внутриимпульсной модуляции. Применение широкополосных сигналов позволяет: увеличить дальность действия РЛС при сохранении высокой разрешающей способности по дальности; обеспечить возможность одновременного измерения дальности и скорости цели; повысить помехозащищенность РЛС от активных и пассивных помех.
Недостатком широкополосных сигналов является сложность устройств генерирования и оптимальной обработки, а также наличие побочных максимумов сигнала на выходе оптимального фильтра, амплитуда которых может достигать 25% от амплитуды основного максимума. Побочные максимумы могут вызвать неверное определение состава цели, а также в некоторых ситуациях снижать защищенность от пассивных помех по сравнению с РЛС, в которой используется простой сигнал с такой же шириной спектра. Действительно, боковые пики сигналов от отражателей, расположенных в соседних с целью разрешаемых объемах, складываясь в окрестности полезного сигнала с основным пиком помехи, увеличивают ее суммарную мощность и тем самым ухудшают отношение «сигнал/помеха». Устраняют боковые пики сглаживанием сигнала в приемном устройстве, что ведет к энергетическим потерям 2-3 дБ.
С этой точки зрения в РЛС с небольшой дальностью обнаружения, где не требуется высокий потенциал, целесообразно применять не сложномодулированные, а короткие простые импульсы, которые на выходе оптимального фильтра не образуют побочных максимумов.
4.5.1. Прием и преобразование линейно-частотно модулированных сигналов
Оптимальная
обработка ЛЧМ сигналов должна обеспечивать
их максимальное сглаживание по
длительности с одновременным повышением
отношения «сигнал/шум». Для выполнения
указанной задачи оптимальный фильтр
приемника должен иметь импульсную
характеристику
![]() ,
зеркальную по отношению к сигнальной
функции
,
зеркальную по отношению к сигнальной
функции
![]() (см. рис.4.19).
(см. рис.4.19).
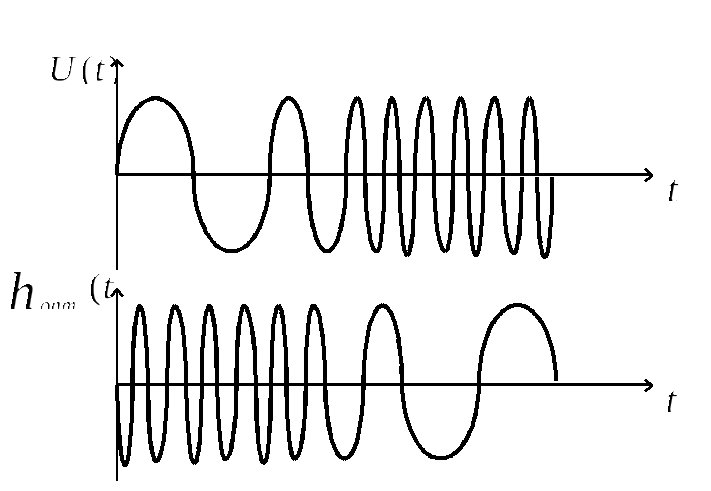
Рис.4.19.
Графики напряжений сигнала
![]() и импульсной характеристики
и импульсной характеристики
![]() оптимального
фильтра
оптимального
фильтра
Таким оптимальным фильтром ЛЧМ сигнала является, например, дисперсионная линия задержки (ДЛЗ). В качестве ДЛЗ используются волноводы , одна из стенок которых соизмерима с длиной волны; линии задержки, составленные из большого количества колебательных контуров, настроенных на близкие частоты. Наибольшее распространение на практике получили ультразвуковые ДЛЗ (УДЛЗ). Структурная схема оптимального фильтра на УДЛЗ представлена на рис.4.20.

Рис.4.20. Структурная схема оптимального фильтра ЛЧМ сигнала
УДЛЗ
представляет собой металлическую
пластину из сплава алюминия или из
стали, толщина которой
![]() (
(![]() -
акустическая длина волны для центральной
частоты линейного участка характеристики
группового запаздывания (ХГЗ)), длина
-
акустическая длина волны для центральной
частоты линейного участка характеристики
группового запаздывания (ХГЗ)), длина
![]() (
(![]() -
скорость распространения акустических
волн в УДЛЗ), ширина не является
критической, если выполняется условие
-
скорость распространения акустических
волн в УДЛЗ), ширина не является
критической, если выполняется условие
![]() .
.
Кварцевые преобразователи располагаются на противоположных концах полоски и предназначены для преобразования электрических колебаний в механические и наоборот. Полосовой фильтр выделяет из преобразованных колебаний полосу частот, соответствующую спектру сигнала.
Характеристика группового запаздывания – функция, показывающая зависимость времени задержки колебаний в фильтре от их частоты (рис.4.21).
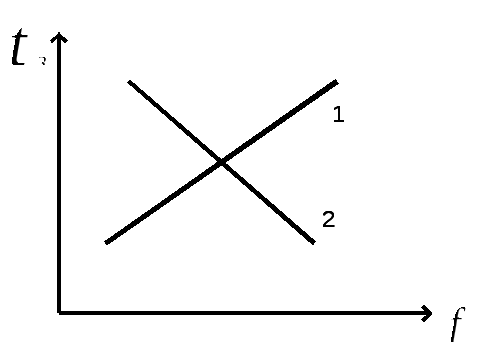
Рис.4.21. Характеристики группового запаздывания колебаний в оптимальном фильтре: 1- для ЛЧМ сигнала с убыванием частоты 2 – для ЛЧМ сигнала с нарастанием частоты
Импульсная характеристика УДЛЗ представляет собой ЛЧМ радиоимпульс с обратным законом изменения частоты (см. рис.4.19). Это обеспечивается дисперсионными свойствами УДЛЗ.
Заметим, что в приемном устройстве с обработкой сложномодулированных сигналов функции амплитудночастотного и фазочастотного согласования могут разделяться (рис.4.22).
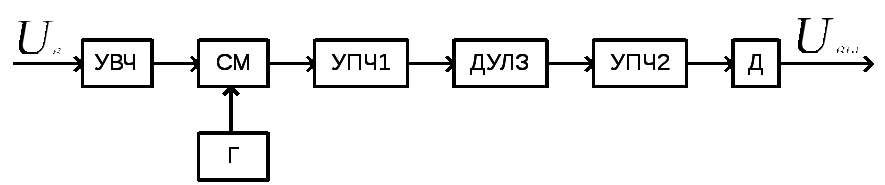
Рис.4.22. Структурная схема приемного устройства ЛЧМ сигналов
Первые из них возлагаются на усилители промежуточной частоты (УПЧ1 и УПЧ2), вторые – на фазовый фильтр, в качестве которого используется ДУЛЗ. УПЧ2 выполняет роль полосового фильтра и, кроме того, обеспечивает дополнительное усиление сигнала, так как ДУЛЗ обладает большим затуханием сигнала (от 15 до 70 дБ) в зависимости от типа используемого материала (алюминий или сталь).
Коэффициент
сжатия оптимального фильтра равен
произведению ширины спектра ЛЧМ сигнала
![]() на его длительность
на его длительность
![]() .
.
![]()
Выходной сигнал согласованного (оптимального) фильтра состоит из основного сжатого импульса и некоторого числа боковых лепестков (рис.4.23), наличие которых не позволяет реализовать потенциальные возможности оптимальной фильтрации по повышению отношения «сигнал/шум» и разрешающей способности.
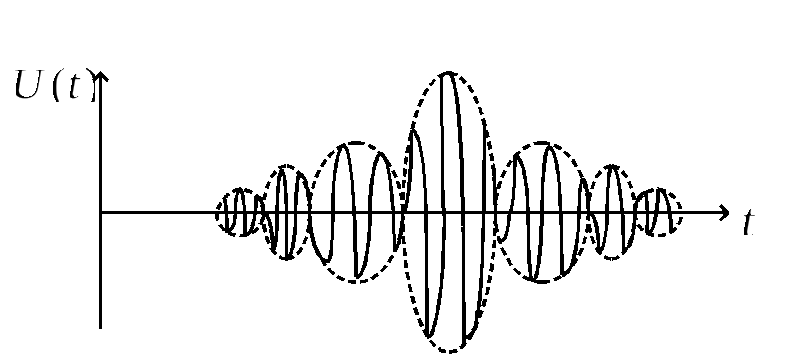
Рис.4.23. Структура сжатого ЛЧМ сигнала
Уровень
боковых лепестков сжатых эхо-сигналов
во многом определяет возможность
разрешения целей с малой и большой
эффективной поверхностью рассеяния
(эффект маскировки главного лепестка
эхо-сигнала от цели с малой ЭПР боковыми
лепестками эхо-сигнала от цели с большой
ЭПР). Поэтому для заданных значений
![]() и заданного уровня боковых лепестков
сжатого эхо-сигнала в некоторых РЛС
(22Ж6) в качестве зондирующего сигнала
используют нелинейночастотно-модулированные
(НЧМ) сигналы. Графическое представление
законов изменения частоты в импульсе
и спектра НЧМ сигнала приведены на
рис.4.24.а,б.
и заданного уровня боковых лепестков
сжатого эхо-сигнала в некоторых РЛС
(22Ж6) в качестве зондирующего сигнала
используют нелинейночастотно-модулированные
(НЧМ) сигналы. Графическое представление
законов изменения частоты в импульсе
и спектра НЧМ сигнала приведены на
рис.4.24.а,б.
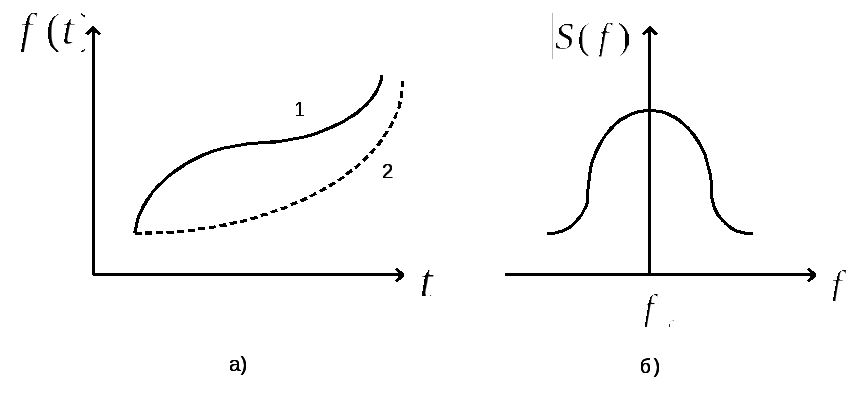
Рис.4.24. а) Закон изменения частоты НЧМ сигнала; б) Спектр НЧМ сигнала 1
Заметим, что в РЛС с частотным уравнением лучом ДНА в вертикальной плоскости для создания косекансной формы зоны обнаружения в вертикальной плоскости используют НЧМ сигнал с законом 2 изменения частоты во времени.
УВЧ
и УПЧ приемника ЛЧМ сигналов должны
иметь полосу пропускания, близкую к
ширине спектра сигнала. Для ослабления
боковых лепестков при обработке
прямоугольного ЛЧМ импульса применяют
УПЧ 2 (рис.4.22) с Гауссовой формой частотной
характеристики. Ширина полосы пропускания
УПЧ 2 составляет примерно
![]() -
ширины спектра сигнала.
-
ширины спектра сигнала.
В современных РЛС с ЛЧМ сигналами возможно получение коэффициента сжатия в пределах нескольких десятков при уровне боковых лепестков ниже 40 дБ.