

Расчетная работа № 9. Исследование электромеханических характеристик двигателя постоянного тока с независимым возбуждением в среде matlab.
Цель работы: изучение моделирования статических и динамических характеристик двигателя постоянного тока с независимым возбуждением в среде MATLAB.
9.1. Модель двигателя постоянного тока с независимым возбуждением.
Двигатель постоянного тока независимого возбуждения (рис.9.1), описывается следующей системой дифференциальных и алгебраических уравнений в абсолютных единицах:
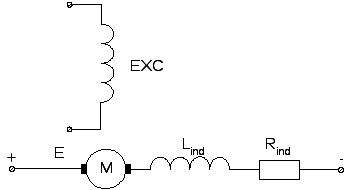
Рис 9.1
![]() ; (1)
; (1)
![]() ; (2)
; (2)
![]() ; (3)
; (3)
![]() , (4)
, (4)
где,
u - напряжение на якорной обмотке двигателя;
e - электродвижущая сила (ЭДС) якоря;
i - ток якоря;
Ф - поток, создаваемый обмоткой возбуждения;
C - электромагнитный момент двигателя;
Cr - момент сопротивления движению;
- частота вращения вала двигателя;
Rind - активное сопротивление якорной цепи;
Lind - индуктивность якорной цепи;
J - суммарный момент инерции якоря и нагрузки, приведенный к валу двигателя;
ce - коэффициент связи между скоростью и ЭДС.
С точки зрения будущей модели, входными воздействиями являются напряжения якоря u и момент сопротивления движению Сr; выходными переменными - электромагнитный момент двигателя C и скорость вращения вала двигателя , а переменными состояния - переменные стоящие под знаком производной (ток якоря i и частота вращения вала двигателя ). Остальные переменные, входящие в состав уравнений (1) - (4) являются параметрами, численные значения которых, необходимо будет задавать при проведении моделирования.
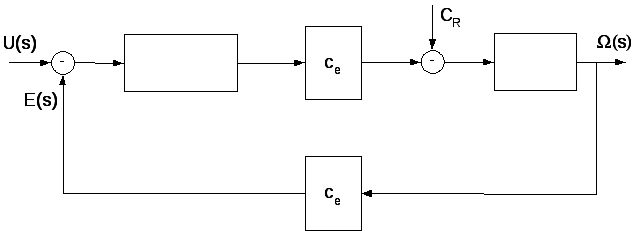
Схема модели, а также графики электромагнитного момента и частоты вращения при прямом пуске двигателя показаны на рис.9.2. В примере приняты следующие значения параметров двигателя (в единицах СИ): Lind=0.001, Rind=0.1, J=10, ce=10, U=220. Наброс нагрузки производится в момент времени 0.2 с, величина момента нагрузки равна 2500 Нм.
Для создания SimPowerSystems модели (в дальнейшем SPS-модели) двигателя на базе управляемого источника тока можно воспользоваться общей схемой, приведенной на рис.9.3.
Выход датчика напряжения должен быть подключен к первому входу сумматора, а на управляющий вход источника тока должен быть подан сигнал пропорциональный току якоря двигателя. Схема блока SPS-модели двигателя, полная схема модели, а также графики тока якоря и частоты вращения вала показаны на рис.9.4.

Рис. 9.2
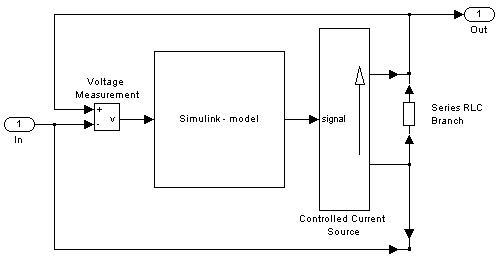
Рис. 9.3
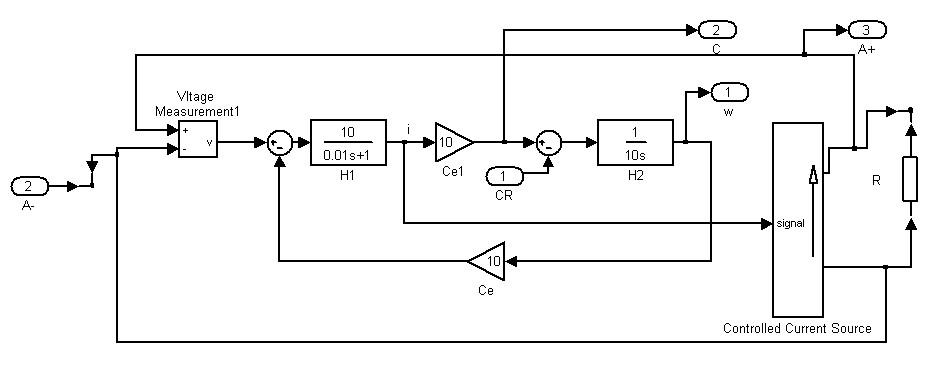
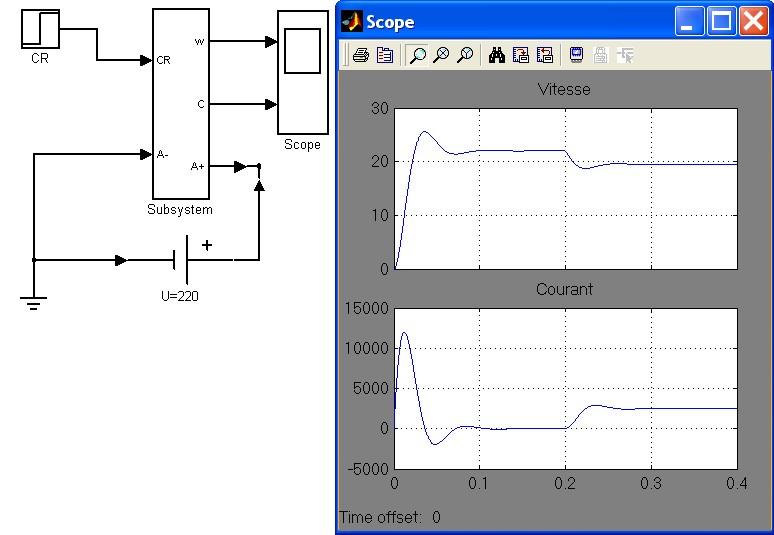
Рис. 9.4
При работе с моделью двигателя следует иметь в виду, что она не является электротехнической в чистом виде, поскольку выходные сигналы электромагнитного момента и скорости являются обычными однонаправленными безразмерными сигналами Simulink.
9.2. Модель для исследования ДПТ.
Модель для исследования ДПТ, реализованная в MATLAB, приведена на рис. 9.5.
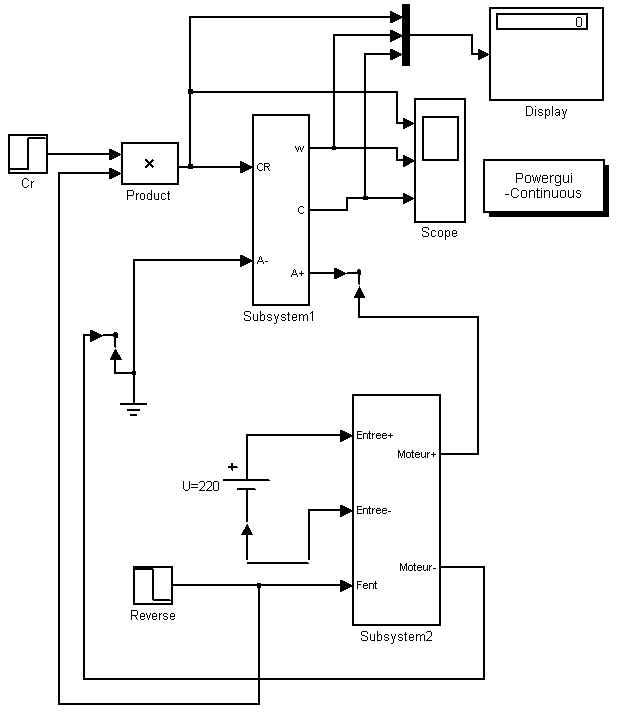
Рис. 9.5
Модели подсистемы 1 и 2 приведены на рис.9.6 и 9.7. Подсистема 1 описана выше. Подсистема 2 служит для изменения полярности напряжения приложенного к якорю ДПТ.

Рис. 9.6

Рис. 9.7
9.3. Моделирование механических характеристик.
Для построения механических характеристик виртуального двигателя необходимо собрать схему, представленную на рис. 9.8. Параметры устройств представлены на рис.9.9.
Следует иметь в виду, что для моделирования статической механической характеристики необходимо задать очень большой момент инерции двигателя, а момент нагрузки изменяйте по синусоидальному закону с низкой частотой (рис.9.9).
Для форматирования полученной характеристики в «XY-Graph» можно воспользоваться следующими командами:
set(0,'ShowHiddenHandles','On')
set(gcf,'menubar','figure')
Полученная механическая характеристика представлена на рис. 9.10.
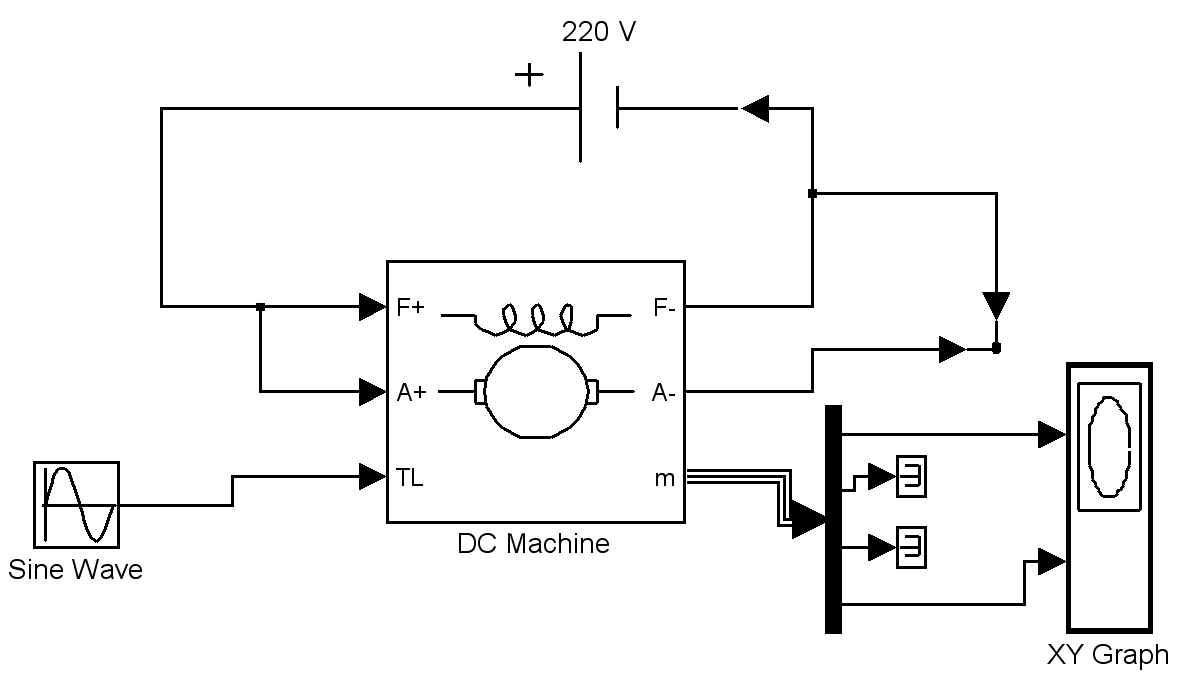
Рис 9.8
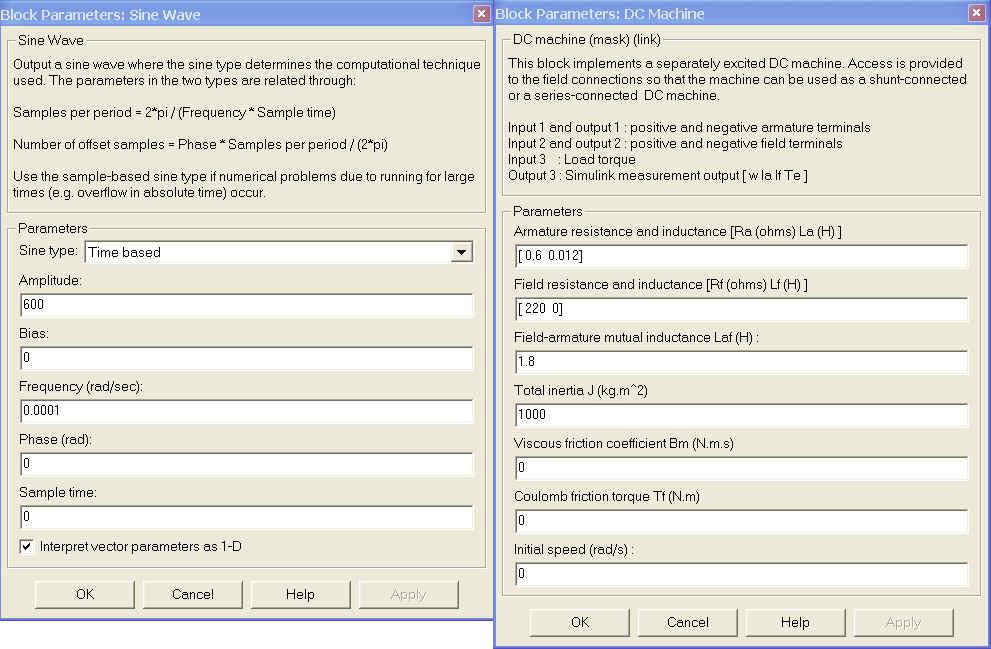
Рис 9.9
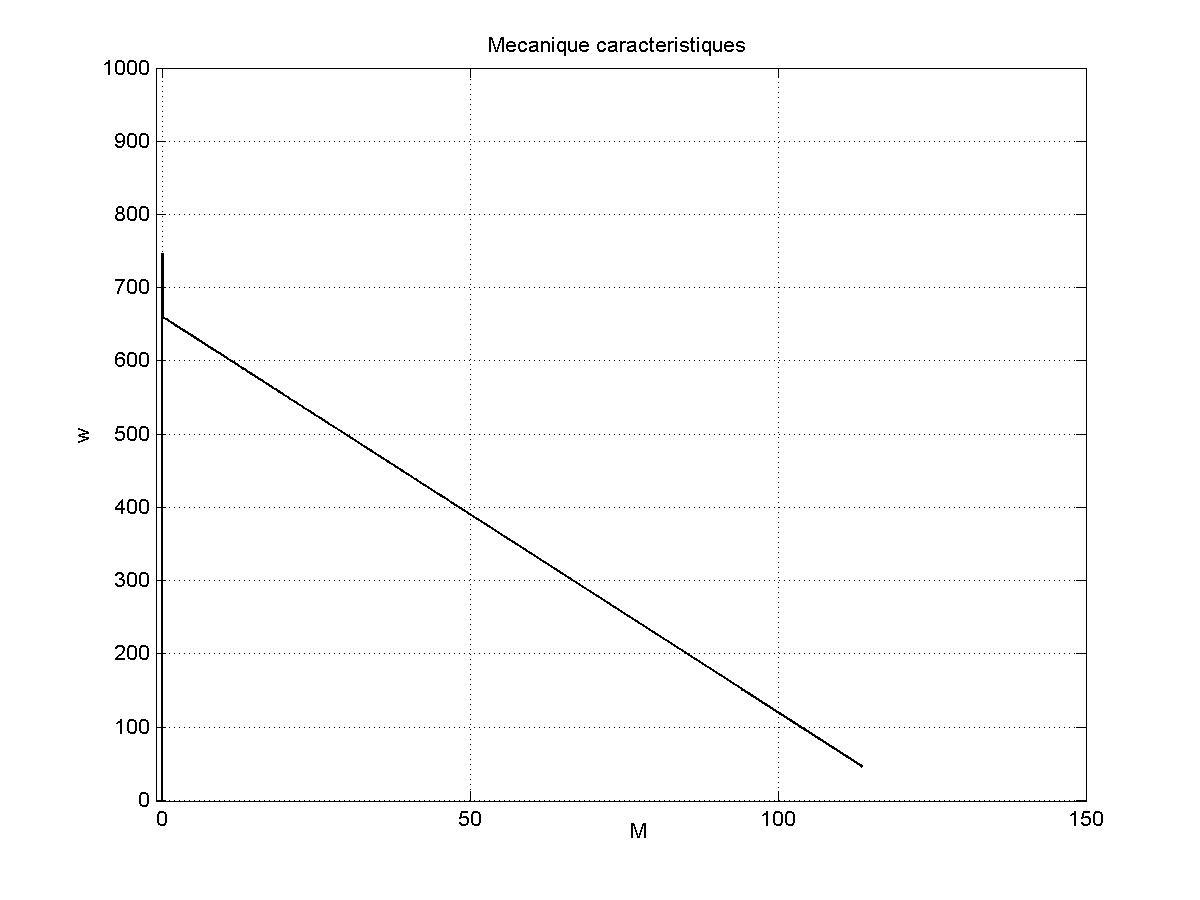
Рис. 9.10
9.4. Задание к работе.
Построить модели, представленные на рис.9.5 и 9.8. Получить с помощью построенных моделей характеристики представленные 9.10 и 9.11.
9.5. Порядок выполнения работы.
-
Реализовать модель (рис.9.5) для исследования ДПТ. Параметры двигателя для модели даны в таблице.
-
Рассчитать пуск двигателя с последующим изменением частоты вращения (рис. 9.11)
-
Реализовать модель (рис.9.8) для исследования механических характеристик ДПТ. Параметры двигателя для модели пункта 1 и 3 должны быть одинаковыми.
-
Используя модель (рис.9.8) рассчитать механических характеристик ДПТ.
9.6.Содержание отчета.
Отчет должен содержать:
-
Модели для исследования ДПТ.
-
Характеристики (рис. 9.10, рис. 9.11.
-
Выводы.
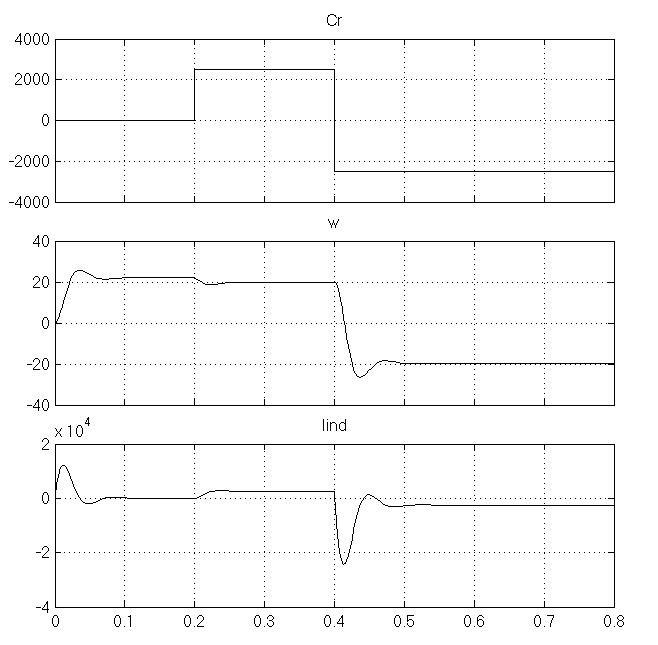
Рис. 9.11
Параметры двигателей постоянного тока с независимым возбуждением
Таблица 9.1
|
Тип |
Pн, кВт |
nн, об/м |
Iн, А |
Rя+Rд.п Ом |
Lя Гн |
С |
Uв.н., В |
Jя, кг м2 |
Uн, В |
|
П101 |
42,0 |
750 |
446,00 |
0,013 |
|
1,3 |
110 |
2,60 |
110 |
|
П21 |
1,50 |
3 000 |
9,00 |
1,99 |
|
1,2 |
220 |
0,042 |
220 |
|
П22 |
2,20 |
3 000 |
12,50 |
1,03 |
|
1,1 |
220 |
0,052 |
220 |
|
П31 |
3,20 |
3 000 |
17,50 |
0,642 |
|
1,0 |
220 |
0,09 |
220 |
|
П31 |
3,20 |
3 000 |
35,00 |
0,129 |
|
0,9 |
110 |
0,021 |
110 |
|
П32 |
4,50 |
3 000 |
24,30 |
0,352 |
|
1,3 |
220 |
0,029 |
220 |
|
П32 |
2,20 |
1 500 |
12,00 |
1,205 |
|
1,2 |
220 |
0,116 |
220 |
|
П32 |
4,50 |
3 000 |
48,50 |
0,266 |
|
1,1 |
110 |
0,025 |
110 |
|
П41 |
6,00 |
3 000 |
33,00 |
0,36 |
|
1,0 |
220 |
0,038 |
220 |
|
П42 |
4,50 |
1 500 |
25,40 |
0,78 |
|
0,9 |
220 |
0,18 |
220 |
|
П42 |
4,50 |
1 500 |
51,00 |
0,14 |
|
1,4 |
110 |
0,045 |
110 |
|
П42 |
8,00 |
3 000 |
87,00 |
0,035 |
|
1,3 |
110 |
0,045 |
110 |
|
П51 |
11,0 |
3 000 |
59,00 |
0,135 |
|
1,2 |
220 |
0,0875 |
220 |
|
П51 |
6,00 |
1 500, |
33,20 |
0,472 |
|
1,3 |
220 |
0,35 |
220 |
|
П51 |
6,00 |
1 500 |
65,50 |
0,121 |
|
1,1 |
110 |
0,087 |
110 |
|
П51 |
3,20 |
1 000 |
18,30 |
1,051 |
|
1,0 |
220 |
0,35 |
220 |
9.7. Контрольные вопросы
-
В каких режимах может работать двигатель постоянного тока (ДПТ)?
-
Какая характеристика ДПТ называется механической?
-
Как можно изменить направление вращения ДПТ?
-
Какие способы торможения можно использовать для ДПТ?
-
Как изменяется частота вращения ДПТ при уменьшении напряжения подводимого к якорю?
-
Как изменяется частота вращения ДПТ при уменьшении тока возбуждения?
-
Какие параметры схемы (рис 9.1) влияют на время разгона ДПТ?