

2. Кинематика твердого тела.
Для нахождения кинематического закона движения, т.е. r=r(t) или х = х(t), у=y(t), z=z(t) надо найти закон движения каждой точки тела, т.е. решить бесконечно большое число уравнений, что сопряжено с непреодолимыми математическими трудностями.
Однако особенности самого твердого тела и особенности его движения могут значительно упростить задачу.
2.1. Число степеней свободы .
Числом степеней свободы называют число независимых механических координат полностью и однозначно определяющих положение тела в пространстве. Или: число независимых механических движений, которые одновременно может совершать тело.
Из таких определений следует, что число степеней свободы для свободной материальной точки равно 3. Для совокупности из n невзаимодействующих между собой точек число степеней свободы равно 3n.
Любые связи (взаимодействия) ограничивают число степеней свободы. Например, точка двигается по поверхности, задаваемой уравнением F(x,y,z)=0. В этом случае необходимо задать независимо 2 координаты, третья же не является независимой - она определяется из уравнения поверхности, по
которой движется точка. Иначе говоря, для точки, движущейся по поверхности, число степеней свободы равно 2. Для точки, движущейся вдоль линии, число степеней свободы равно 1. Действительно, любую линию можно пересечением двух поверхностей, т.е. для определения положения точки в пространстве нужно указать независимо только одну координату, две другие же определяются из уравнения линии.
Рассмотрим теперь систему точек, связанных жесткими связями. Пусть таких точек 2 (рис. 7). Для определения положения одной из точек системы в пространстве нужно указать 3 координаты, т.е. эта часть системы обладает 3-мя степенями свободы. Если эту точку закрепить неподвижно, у системы будет отнято 3 степени свободы. Вторая точка при этом может двигаться только по поверхности сферы, т.е. обладает 2-мя степенями свободы. Следовательно, вся система обладает 5-ю степенями свободы.
![]()
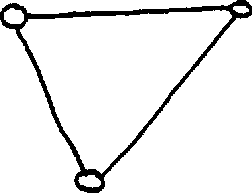
Рис. 7 Рис. 8
Аналогично определяется число степеней свободы для системы, состоящей из трех жестко связанных между собой точек (рис. 8). Если одну из точек системы закрепить, у системы отнимается 3 степени свободы При закреплении второй точки дополнительно отнимается еще а степени свободы При этом третья точка сможет двигаться только вдоль линии, т.е. обладает одной степенью свободы. поэтому вся система обладает 6-ю степенями свободы. Легко убедиться» что добавляя к такой системе 4-ю, 5-ю и т.д. точки, мы не увеличим число степеней свободы, т.е. максимальное число степеней свободы для системы жестко связанных между собой точек равно. Абсолютно твердое тело как раз представляет собой такую систему, следовательно, обладает 6-ю степенями свободы.
2.2. Поступательное движение твёрдого тела.
Поступательным называют такое движение твердого тела, при котором любая прямая, проведенная в теле, при движении тела остается параллельной самой себе. Будем рассматривать движение абсолютно твердого тела. Выделим в теле произвольно т. т. А1 и В1. Через промежуток времени t они займут положения А2 и В2 соответственно (рис. 9).
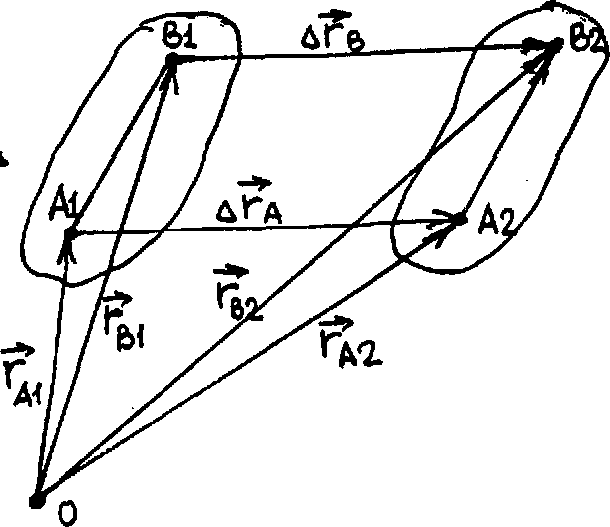 Рис. 9
Рис. 9
Эти положения можно задать векторным способом, указав радиус-векторы ra1, rb1, ra2, rb2. Перемещения точек равны ra, и rb . Векторы (A1B1)и (A2B2) равны между собой, так как равны их модули (тело абсолютно твердое) и одинаковы направления (тело перемещается поступательно).
П![]() оэтому
перемещения точек А и В равны (ra
= rb)
Поскольку точки выбирались произвольно,
можно сделать вывод, что при поступательном
движении тела все его точки совершают
одинаковые перемещения. По определению:
оэтому
перемещения точек А и В равны (ra
= rb)
Поскольку точки выбирались произвольно,
можно сделать вывод, что при поступательном
движении тела все его точки совершают
одинаковые перемещения. По определению:
т.е. и скорости всех точек тела одинаковы. Аналогично можно показать, что и ускорения всех точек тела одинаковы. Следовательно, при поступательном движении все точки тела движутся одинаково и для описания движения тела достаточно рассмотреть движение только одной его точки (чаще всего центра масс тела). Пример поступательного движения - движение кузова автомобиля на прямолинейном участке дороги.