

Хід роботи
1. Вибрати відповідне завдання за даними приведеними в таблиці 7.2 та викори-стовуючи надану технічну документацію, частотного перетворювача необхідно:
-
виписати застосування та технічну характеристику перетворювача
-
зарисувати термінал програмування та схему підключення чп
2. Ознайомитись з реальним перетворювачем та засвоїти:
- розташування входів та виходів
- зарисувати схему підключення реального частотного перетворювача
Таблиця 7.2 Вихідні дані до практичної роботи № 7
|
Варіанти |
1/6/11/16 21/26/31 |
2/7/12/17/ 22//27/32 |
3/8/13/18/ 23/28/33 |
4/9/14/19/ 24/29/34 |
5/10/15/20 25/30/35 |
|
Тип ЧП |
ATV21 |
ATV31 |
ATV61 |
ATV71 |
ATV11 |
28
Практична робота № 8 тема: Проектування замкнених систем керування електроприводом
Мета: придбати практичні навики у проектування функціональних замкнених систем керування електроприводом
Теоретична частина
Замкнені структури ЕП будуються по принципу компенсації збурення та відхилення, що називають принципом зворотного зв’язку. Принцип компенсації найбільш характерний зовнішнього збурення П, моменту навантаження Мс , при регулюванні швидкості ω. Основними признакам замкненої структури електроприводу є наявність кола , по котрій на вхід ЕП ( рис 8.1 , а ) разом з завданням швидкості Uз.с подається сигнал Uм = kм Mс пропорційний моменту Мс . В результаті чого керування електроприводом ЕП здійснюється сумарним сигналом U∆ , котрий автоматично міняється в потрібну сторону при коливання моменту навантаження, що забезпечує з допомогою системи керування підтримання швидкості ЕП на заданому рівні системи
Більшість замкнених структур електропривода будуються по принципу відхилення
( зворотного зв’язку ). Він характеризується наявністю кола зворотного зв’язку, що з’єднує вихід ЕП з його входом, звідки й пішла назва замкнених схем. Для приводу, що розглядаємо регулювання швидкості для цієї структури являється коло зворотного зв’язку (рис. 8.1б), по якій інформація про дане значення швидкості (сигнал зворотного зв’язку Uо.с= kо.сω ) подається на вхід ЕП, де він вираховується з сигналу швидкості Uз.с. Керування ЕП здійснюється сигналом відхилення UΔ= Uз.с - Uо.с (його також називають сигналом розузгодження або помилки). Цей сигнал при відмінності швидкості від заданого рівня автоматично змінюється необхідним чином і усуває з допомогою системи керування ЕП ці відхилення. Тим самим керування здійснюється з урахуванням його результату.
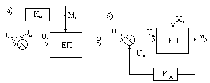
Рисунок 8.1- Замкнені структури ЕП з компенсацією обурення (а) і зі зворотнім зв’язком (б).
Силова частина замкнених схем ЕП будується, як правило, на основі системи “перетворювач-двигун), в якій основною керуючою дією на двигун являється напруга для ДПТ і частота напруги для АД і СД.
Ще одною характерною ознакою замкнених ЕП являються використання в них головним чином безконтактних елементів і приладів, в першу чергу напівпровідникових. Релейно - контактна апаратура використовується в них для кіл комутації живлячої напруги, захистів, блокувань і сигналізації.
Для відпрацювання законів керування двигуном, який реалізується силовим перетворювачем, замкнені схеми ЕП мають певний набір керуючих елементів. В їх склад входять: задаючі (програмні) пристрої, що визначають рівень і характер зміни регульованих координат і технологічних параметрів, що дають інформацію про хід технологічного процесу і роботі самого ЕП; регулятори і функціональні перетворювачі, що виробляють керуючі дію на основі сигналів задаючих пристроїв і давачів координат і параметрів; узгоджуючи елементи, що дозволяють з’єднати в єдину схему всі вказані елементи за рахунок узгодження їх вхідних і вихідних сигналів по роду струму, рівням і виду сигналів і т.д.
Прикладами силових аналогових приладів можуть служити керовані випрямлячі і перетворювачі частоти, в яких напруга і частота на виході можуть регулюватися в широких межах в залежності від рівня вхідного сигналу керування.
29
Прогресивним явищем у створенні технічних засобів керування стала розробка уніфікованої блочної системи регулювання (УБСР). Використання цієї системи забезпечує широку уніфікацію виробництва комплектних засобів керування, спрощує проектування, налагодження та експлуатацію ЕП, покращує техніко-економічні показники їх роботи.