22. Дискретное косинусное преобразование.
ДКП - разновидность ДПФ, предполагающая расчет только действительной части – дискретное косинусное преобразование.
Посредством ДКП входной вектор временных отсчетов преобразуется в вектор спектральных коэффициентов. Преобразование реализуется как умножение квадратной косинусной матрицы на входной вектор-столбец:
![]() .
.
Формула для элемента n-столбца k-строки:  ,
,
где k=1…N, n=1…N, 
Общее выражение для расчета ДКП имеет вид:
![]() .
.
Например, при N=4 матрица имеет вид:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() и.т.д
и.т.д
Численные значения в ячейках матрицы представляют собой функции, которые называются базисными косинусными функциями.
0.3536 0.3536 0.3536 0.3536
0.4904 0.4157 0.2778 0.0975
0.4619 0.1913 -0.1913 -0.4619
0.4157 -0.0975 -0.4904 -0.2778
Например, входной дискретный сигнал имеет отсчеты х(0)=0,3536, х(1)=0,3536, х(2)=0,6464, х(3)=1,0607, х(4)=0,3536, х(5)=-1,0607, х(6)=-1,3536, х(7)=-0,3536 Результат ДКП такого сигнала имеет значения:
X(1) X(2) X(3) X(4)
0 1.5997 -0.7654 -0.9061
X(5) X(6) X(7) X(8)
1.0001 -0.1803 -0.0001 -0.0423
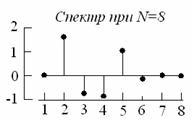
При увеличении количества периодов рассматриваемого сигнала, в спектре ДКП четко различается область концентрации информации о сигнале. Эта область имеет размер, равный половине числа коэффициентов плюс один.
Такое распределение информации о сигнале не является случайным. ДКП применяется для сжатия данных в системах кодирования преобразованием.
Сигналы восстанавливаются согласно формуле обратного ДКП:
![]() ,
,
При восстановлении сигнала применяется транспонированная матрица прямого ДКП.
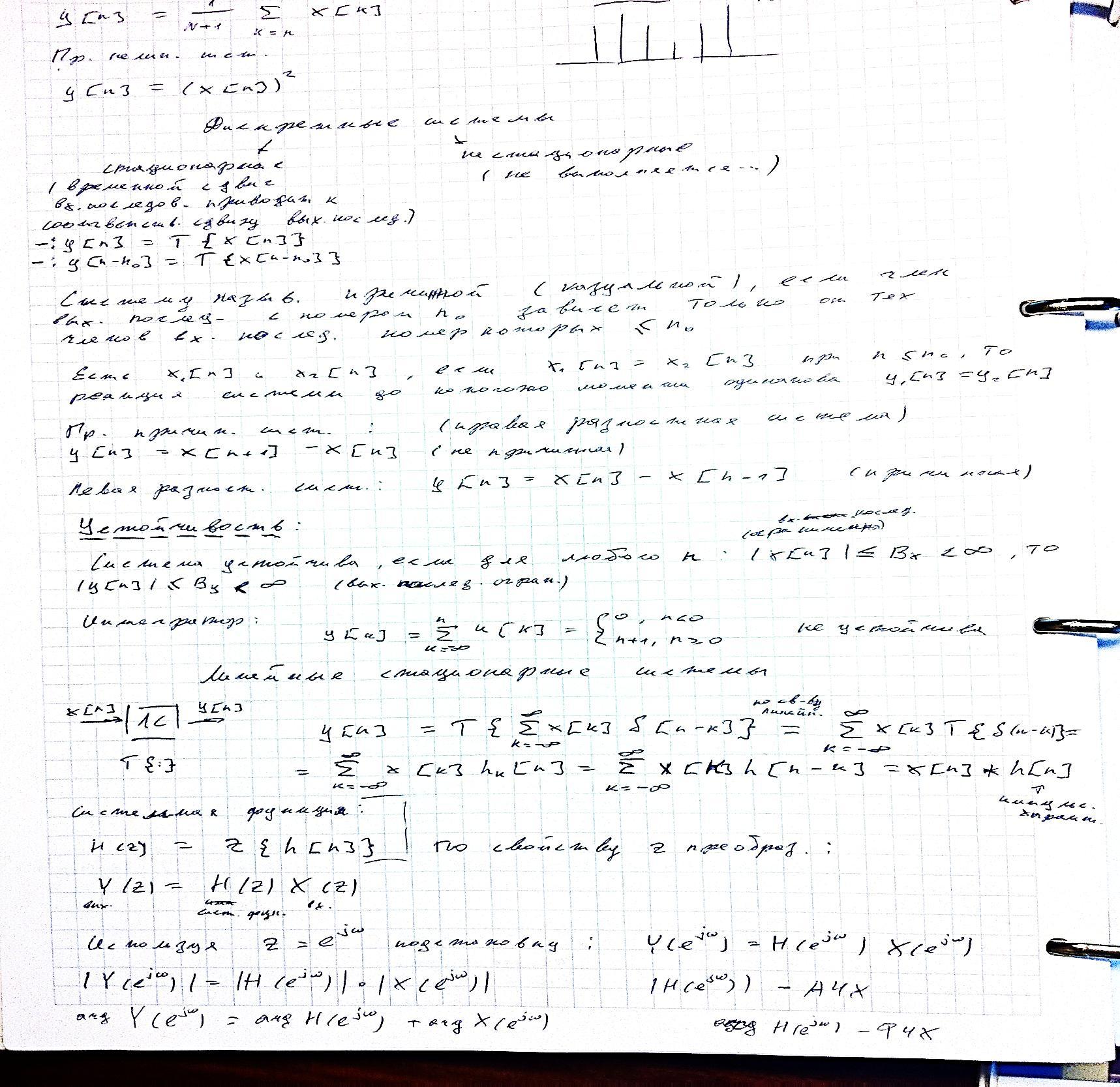
23. Линейная стационарная дискретная система: определение, свойства, примеры.

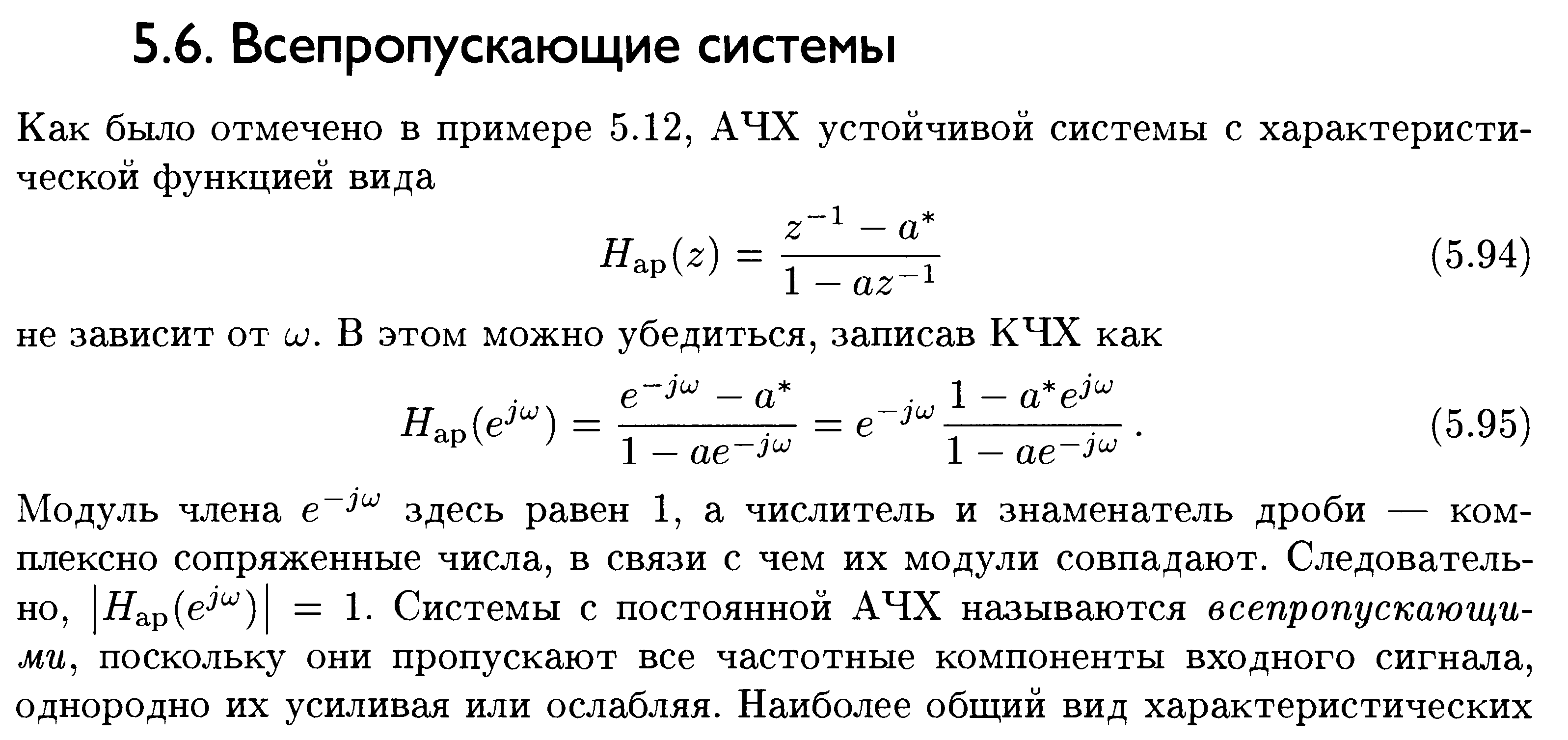
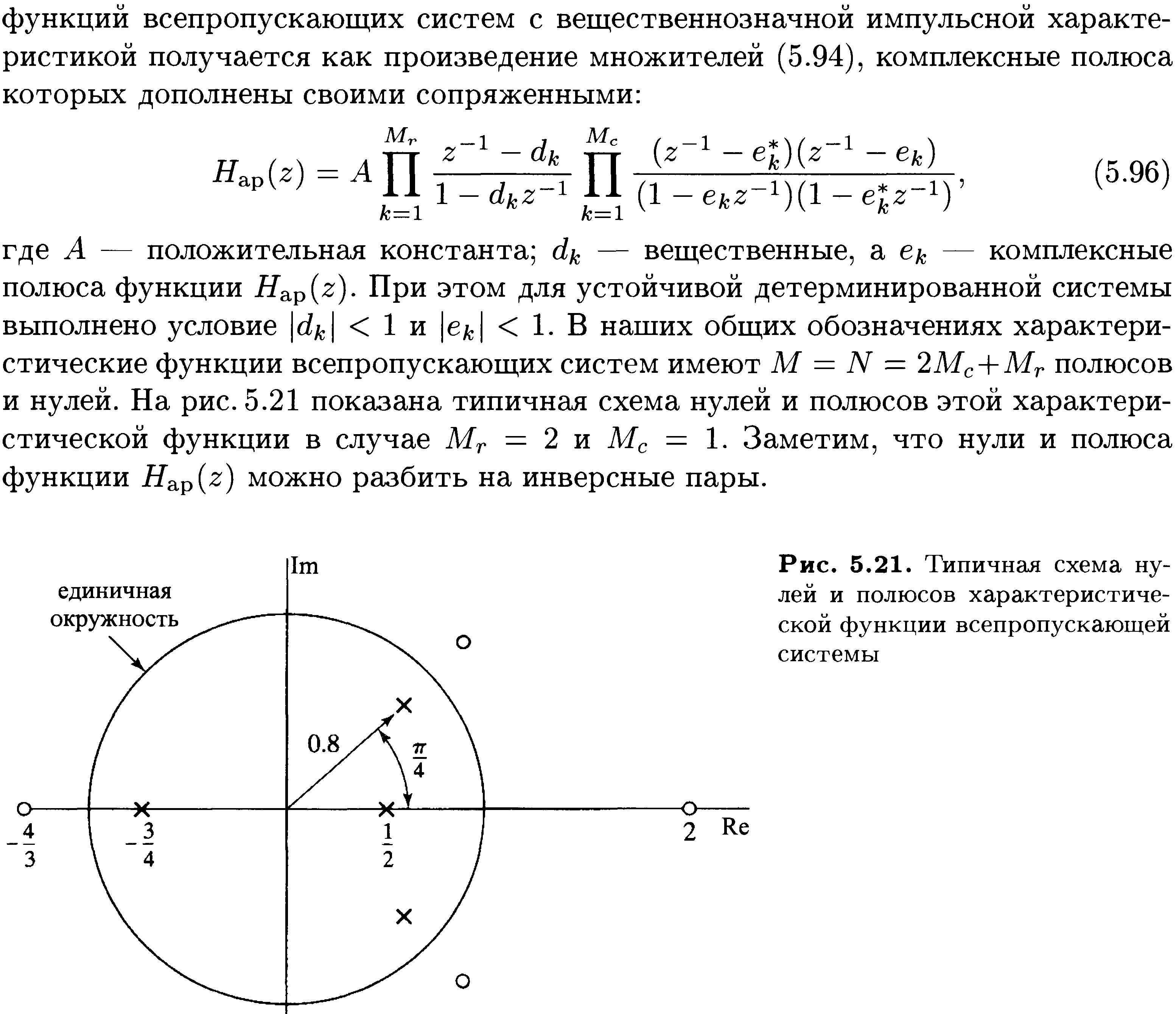
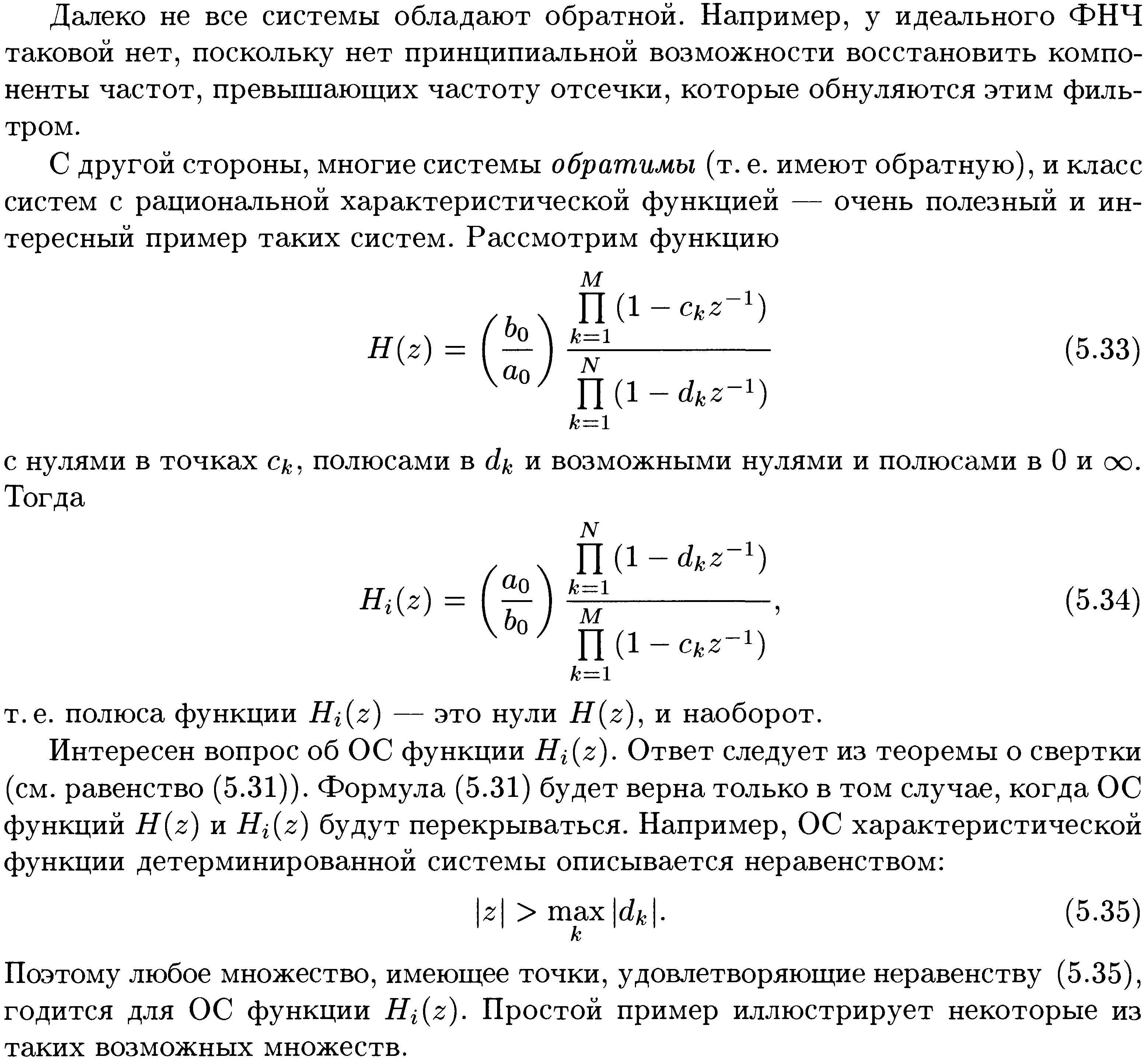
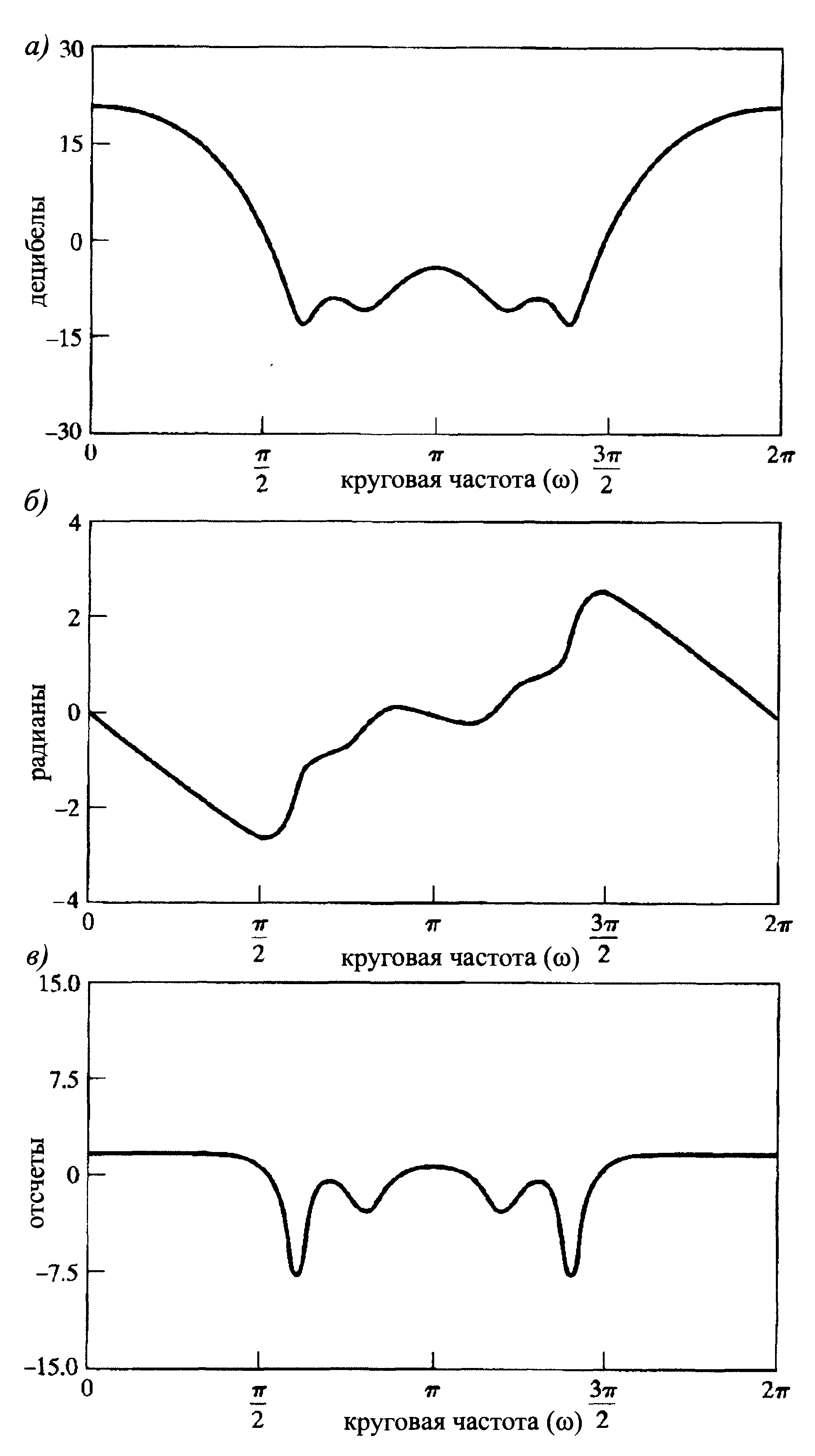
24. Всепропускающие системы, обратные системы. Ограничения, накладываемые на всепропускающие и обратные системы.

Значение непрерывных ФЧХ всепропускающей системы не положительны на [0,pi].
Всепропускающие системы находят широкое применение. Их используют, например, в качестве компенсаторов искажения фазы (или групповой задержки), они полезны в теории минимально фазовых систем. Кроме того, их можно использовать при преобразовании частотно-избирательных фильтров в другие виды фильтров и в конструкции фильтра с переменной частотой отсечки.

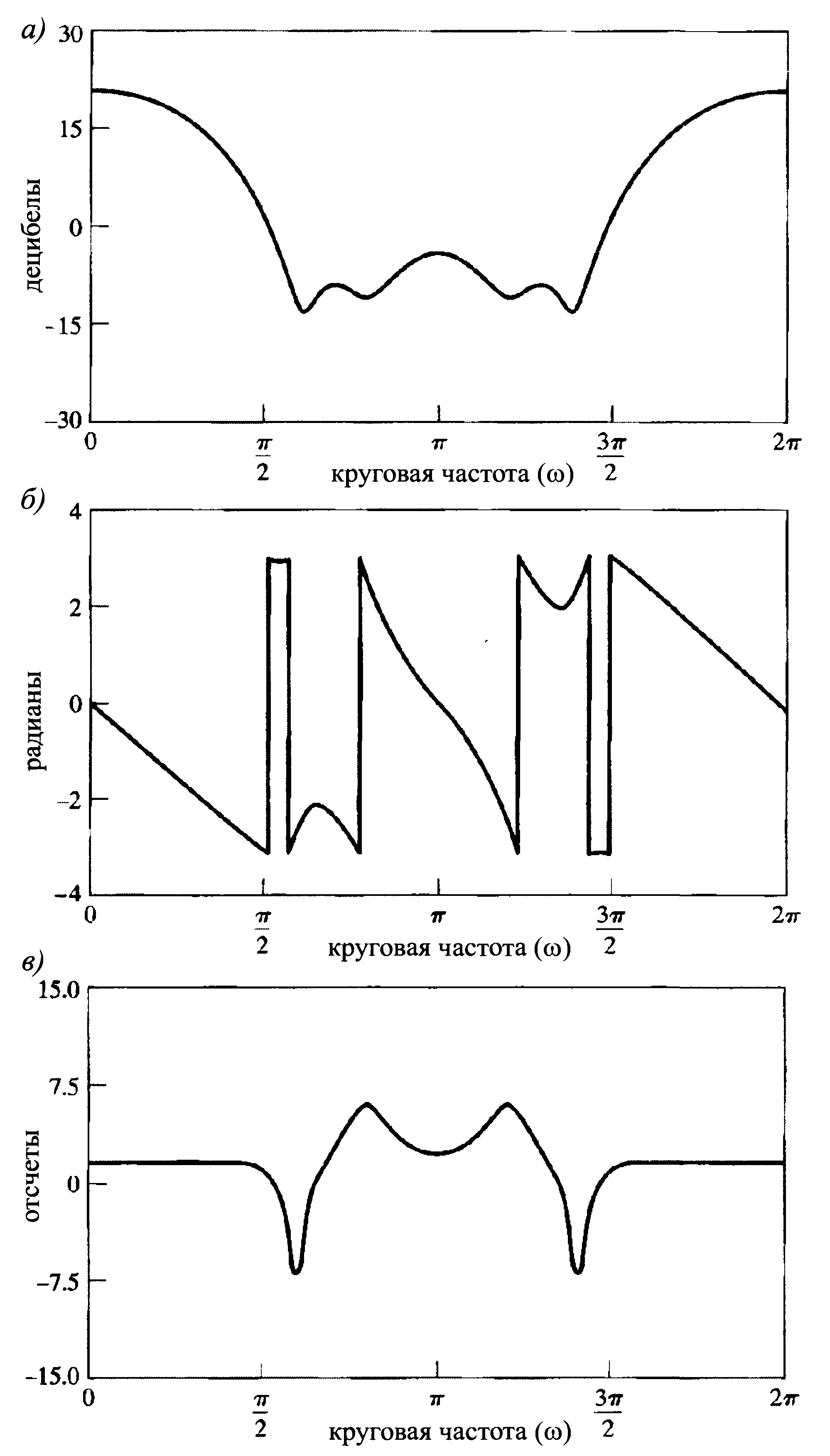
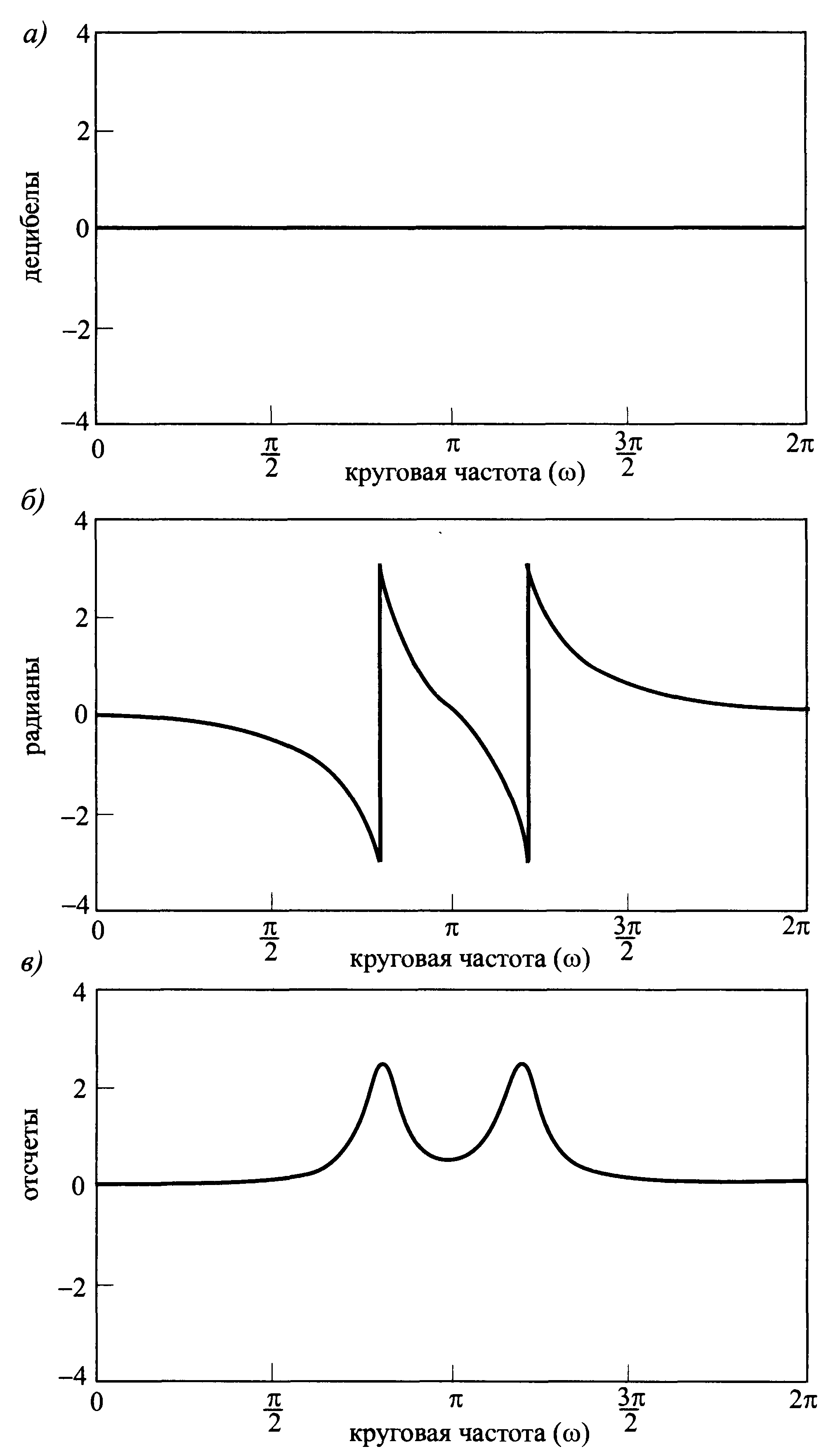
25. Минимально-фазовые системы и их преимущества. Требования к системной функции Минимально-фазовых систем

![]()
|
|
|

|
|
|


|
|
|

|
|
|
|
|
|