

Лекция № 2
1.5. Контурные избыточные связи и локальные избыточные связи в кинематических парах
Механизмы с
избыточными связями (![]() )
нельзя собрать без деформации звеньев.
Такие механизмы требуют повышенной
точности изготовления, в противном
случае в процессе сборки звенья
деформируются, трение в кинематических
парах может сильно увеличиться и привести
к заклиниванию звеньев. Поэтому с этой
точки зрения избыточные связи в механизме
нежелательны.
)
нельзя собрать без деформации звеньев.
Такие механизмы требуют повышенной
точности изготовления, в противном
случае в процессе сборки звенья
деформируются, трение в кинематических
парах может сильно увеличиться и привести
к заклиниванию звеньев. Поэтому с этой
точки зрения избыточные связи в механизме
нежелательны.
Однако в целом ряде случаев приходится сознательно проектировать и изготавливать статически неопределимые механизмы с избыточными связями для обеспечения нужной прочности и жесткости системы, особенно при передаче больших сил.
Таким образом, на практике при конструировании машин не следует стремиться устранять или же оставлять минимальное количество избыточных связей, т.к. это может оказаться невыгодным из-за усложнения конструкции или по каким-либо другим соображениям. В общем случае оптимальное решение следует искать, учитывая наличие необходимого технологического оборудования, стоимость изготовления, требуемые ресурс работы и надежность машины, следовательно, это весьма сложная задача на оптимизацию для каждого конкретного случая.
Следует различать контурные избыточные связи, возникающие в замкнутых кинематических цепях (контурах) механизма, и локальные избыточные связи в кинематических парах.
Методику определения и устранения избыточных связей в кинематических цепях механизмов рассмотрим на примерах.
а)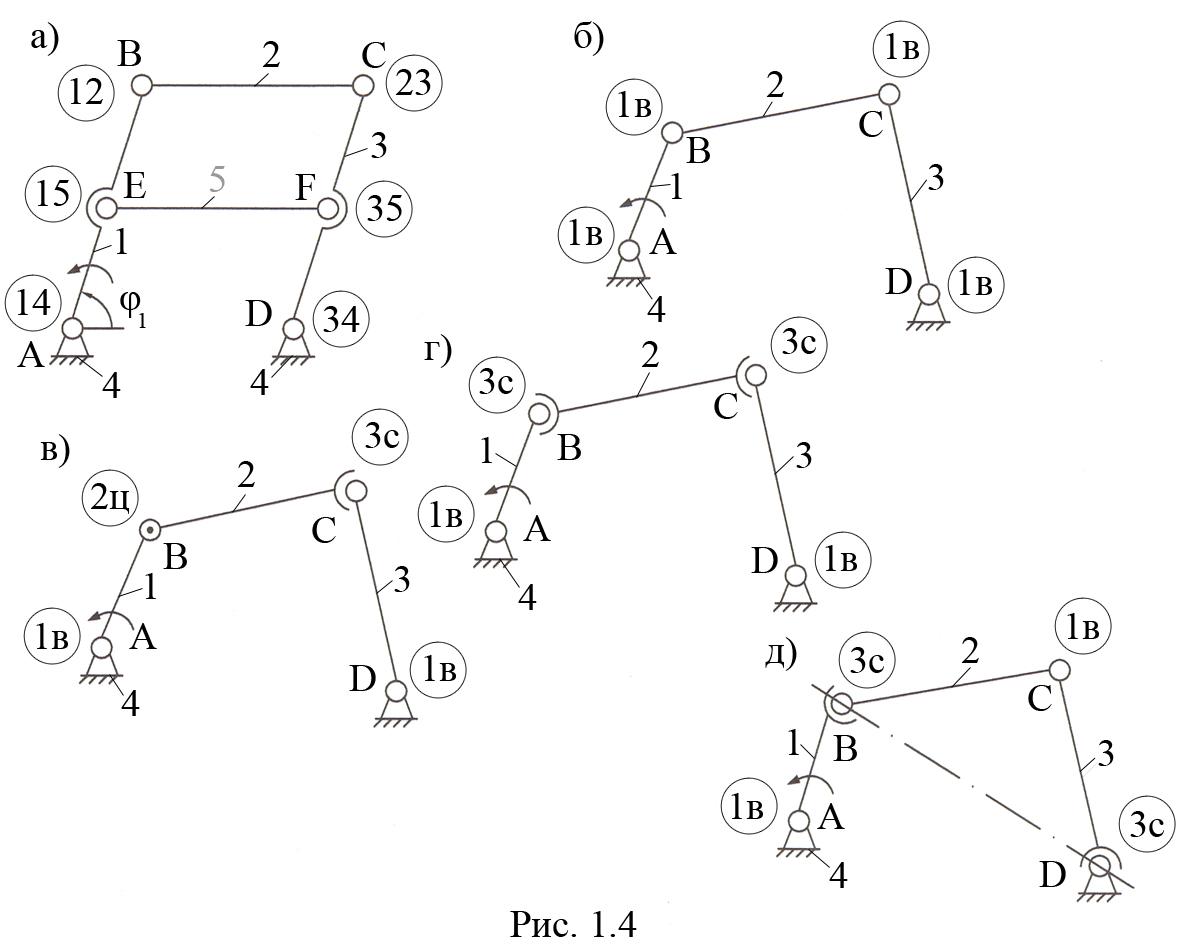
На рис. 1.4, а
показан пятизвенный механизм двойного
параллелограмма, выполненный по плоской
схеме. В этом случае
![]() (одна обобщенная координата
(одна обобщенная координата
![]() ),
),
![]() ,
,
![]() ,
,
![]() .
Следовательно, по формуле Чебышева
.
Следовательно, по формуле Чебышева
![]() т.е.
механизм статически неопределимый, с
одной избыточной связью. Действительно,
основной четырехзвенный механизм
т.е.
механизм статически неопределимый, с
одной избыточной связью. Действительно,
основной четырехзвенный механизм
![]() может быть собран без деформаций звеньев
при любых (в некоторых пределах) длинах
звеньев, однако, постановка дополнительного
звена 5 произвольной длины невозможна,
для сборки придется выполнить условие
равенства длин параллельных звеньев,
что практически возможно лишь при
высокой точности изготовления.
может быть собран без деформаций звеньев
при любых (в некоторых пределах) длинах
звеньев, однако, постановка дополнительного
звена 5 произвольной длины невозможна,
для сборки придется выполнить условие
равенства длин параллельных звеньев,
что практически возможно лишь при
высокой точности изготовления.
Следует отметить то обстоятельство, что при структурном анализе не учитывались зазоры в кинематических парах: благодаря им подвижность кинематической пары повышается и влияние избыточных связей несколько смягчается.
Полученный после
удаления звена 5 плоский четырехзвенный
механизм с четырьмя одноподвижными
вращательными парами (![]() ,
,
![]() ,
,
![]() ,
рис. 1.4, б) является оптимальным:
,
рис. 1.4, б) является оптимальным:
![]() Реальный
механизм за счет неточностей изготовления
(например, вследствие непараллельности
осей
Реальный
механизм за счет неточностей изготовления
(например, вследствие непараллельности
осей
![]() и
и
![]() )
оказывается пространственным. По формуле
Малышева тогда в механизме оказываются
три избыточные связи:
)
оказывается пространственным. По формуле
Малышева тогда в механизме оказываются
три избыточные связи:
![]()
Чтобы данный
пространственный механизм был статически
определимым, нужна его другая структурная
схема, полученная понижением класса
некоторых кинематических пар, например
схема, изображенная на рис. 1.4, в, для
которой
![]() Это механизм оптимальной структуры, но
стоимость его изготовления повышается.
Это механизм оптимальной структуры, но
стоимость его изготовления повышается.
Возможен вариант
механизма (рис. 1.4, г) с двумя сферическими
парами (![]() ,
,
![]() );
в этом случае помимо основной подвижности
механизма
);
в этом случае помимо основной подвижности
механизма
![]() появляется местная подвижность
появляется местная подвижность
![]() – возможность вращения шатуна 2 вокруг
своей оси
– возможность вращения шатуна 2 вокруг
своей оси
![]() .
Эта подвижность не влияет на основной
закон движения механизма и может быть
даже полезна с точки зрения выравнивания
износа шарниров
.
Эта подвижность не влияет на основной
закон движения механизма и может быть
даже полезна с точки зрения выравнивания
износа шарниров
![]() и
и
![]() :
при работе механизма шатун 2 может
самопроизвольно поворачиваться вокруг
своей оси за счет переменных динамических
нагрузок и вибраций. Следовательно,
:
при работе механизма шатун 2 может
самопроизвольно поворачиваться вокруг
своей оси за счет переменных динамических
нагрузок и вибраций. Следовательно,
![]() и формула Малышева подтверждает, что
такой механизм будет оптимальным:
и формула Малышева подтверждает, что
такой механизм будет оптимальным:
![]()
На рис. 1.4, д показан
вариант схемы механизма, который имеет
групповую подвижность звеньев
![]() .
Здесь две сферические пары установлены
в шарнирах
.
Здесь две сферические пары установлены
в шарнирах
![]() и
и
![]() ,
и звенья 2 и 3 будут иметь дополнительную
общую (групповую) подвижность в виде
возможного совместного вращения вокруг
оси
,
и звенья 2 и 3 будут иметь дополнительную
общую (групповую) подвижность в виде
возможного совместного вращения вокруг
оси
![]() .
Такой вариант механизма не допустим,
т.к. поведение выходного звена становится
не предсказуемым.
.
Такой вариант механизма не допустим,
т.к. поведение выходного звена становится
не предсказуемым.
Механизмы с
незамкнутой кинематической цепью
собираются без натягов, поэтому они
всегда оптимальны, без избыточных связей
(![]() ).
).
Итак, для реальных
механизмов общее число степеней свободы
определяется как
![]()
Локальные избыточные связи возникают в сложных кинематических парах. На рис. 1.5, а показан консольный вал 1, образующий со стойкой 2 вращательную пару V класса. Прогиб вала в точке С под действием силы F может иметь недопустимо большие значения.
а
в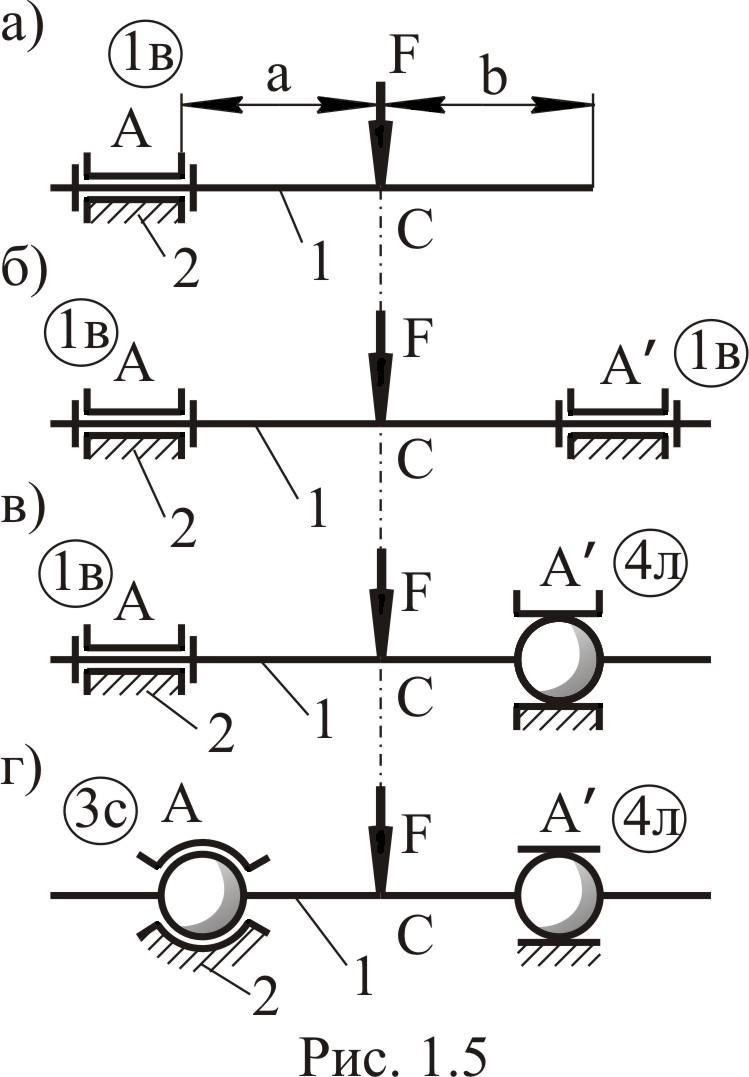
![]()
Если вместо простой
вращательной пары вал установить на
двух опорах (рис. 1.5, б), то прогиб вала
может быть уменьшен, но такая сложная
кинематическая пара дает 5 избыточных
связей:
![]() ,
,
![]() ,
,
![]() ;
;
![]() Число избыточных локальных связей в
кинематической паре, способствуя
уменьшению податливости конструкции,
может оказаться вредным в случае
изменения температурного режима работы,
при деформации стойки, при отклонениях
размеров, формы и расположения поверхностей
элементов кинематической пары. Поэтому
число избыточных локальных связей
приходится уменьшать. Так, если для вала
правый подшипник выполнить четырехподвижным
линейным II класса (рис. 1.5, в), то число
связей будет уменьшено до двух, и прогиб
вала в точке
Число избыточных локальных связей в
кинематической паре, способствуя
уменьшению податливости конструкции,
может оказаться вредным в случае
изменения температурного режима работы,
при деформации стойки, при отклонениях
размеров, формы и расположения поверхностей
элементов кинематической пары. Поэтому
число избыточных локальных связей
приходится уменьшать. Так, если для вала
правый подшипник выполнить четырехподвижным
линейным II класса (рис. 1.5, в), то число
связей будет уменьшено до двух, и прогиб
вала в точке
![]() (при а=в)
уменьшится в 8 раз по сравнению с
консольной установкой вала (рис. 1.5, а).
Если оба подшипника выполнить со
сферическими элементами (рис. 1.5, г),
причем левый подшипник неподвижен в
осевом направлении (фиксированная
опора), а правый имеет осевую подвижность
(плавающая опора), то максимальный прогиб
от нагрузки
(при а=в)
уменьшится в 8 раз по сравнению с
консольной установкой вала (рис. 1.5, а).
Если оба подшипника выполнить со
сферическими элементами (рис. 1.5, г),
причем левый подшипник неподвижен в
осевом направлении (фиксированная
опора), а правый имеет осевую подвижность
(плавающая опора), то максимальный прогиб
от нагрузки
![]() в точке
в точке
![]() (при а=в)
уменьшится только в два раза по сравнению
с консольной опорой вала только на левом
конце (рис. 1.5, а), однако вал будет
статически определимым:
(при а=в)
уменьшится только в два раза по сравнению
с консольной опорой вала только на левом
конце (рис. 1.5, а), однако вал будет
статически определимым:
![]()