

1.2. Классификация кинематических пар
Кинематические пары различают по характеру соприкосновения звеньев: пару называют низшей, если элементы звеньев соприкасаются только по поверхности, и высшей, если касание элементов звеньев происходит по линиям или в точках. При этом линейный или точечный контакт понимается как первоначальный - при соприкосновении звеньев без усилия, а под нагрузкой звенья, образующие высшую пару, будут соприкасаться по некоторой фактической поверхности, называемой пятном контакта.
Кинематические пары классифицируют также по числу Н степеней свободы в относительном движении звеньев (подвижностей пары) и по числу S условий связи (ограничений), накладываемых парой на движение одного звена относительно другого.
Свободное тело в
пространстве имеет шесть степеней
свободы (три поступательных движения
вдоль каждой из осей координат x,
y, z и три
вращательных движения вокруг каждой
из трех осей). Поэтому величины H
и S связаны соотношением:
![]() ,
где
,
где
![]() или 5. При
или 5. При
![]() пары не существует, а есть два тела,
движущихся независимо друг от друга.
При
пары не существует, а есть два тела,
движущихся независимо друг от друга.
При
![]() кинематическая пара становится жестким
соединением двух звеньев, т.е. одним
звеном. По величине
кинематическая пара становится жестким
соединением двух звеньев, т.е. одним
звеном. По величине
![]() определяют класс кинематической пары.
На рис. 1.1 представлены кинематические
пары различных классов.
определяют класс кинематической пары.
На рис. 1.1 представлены кинематические
пары различных классов.
1п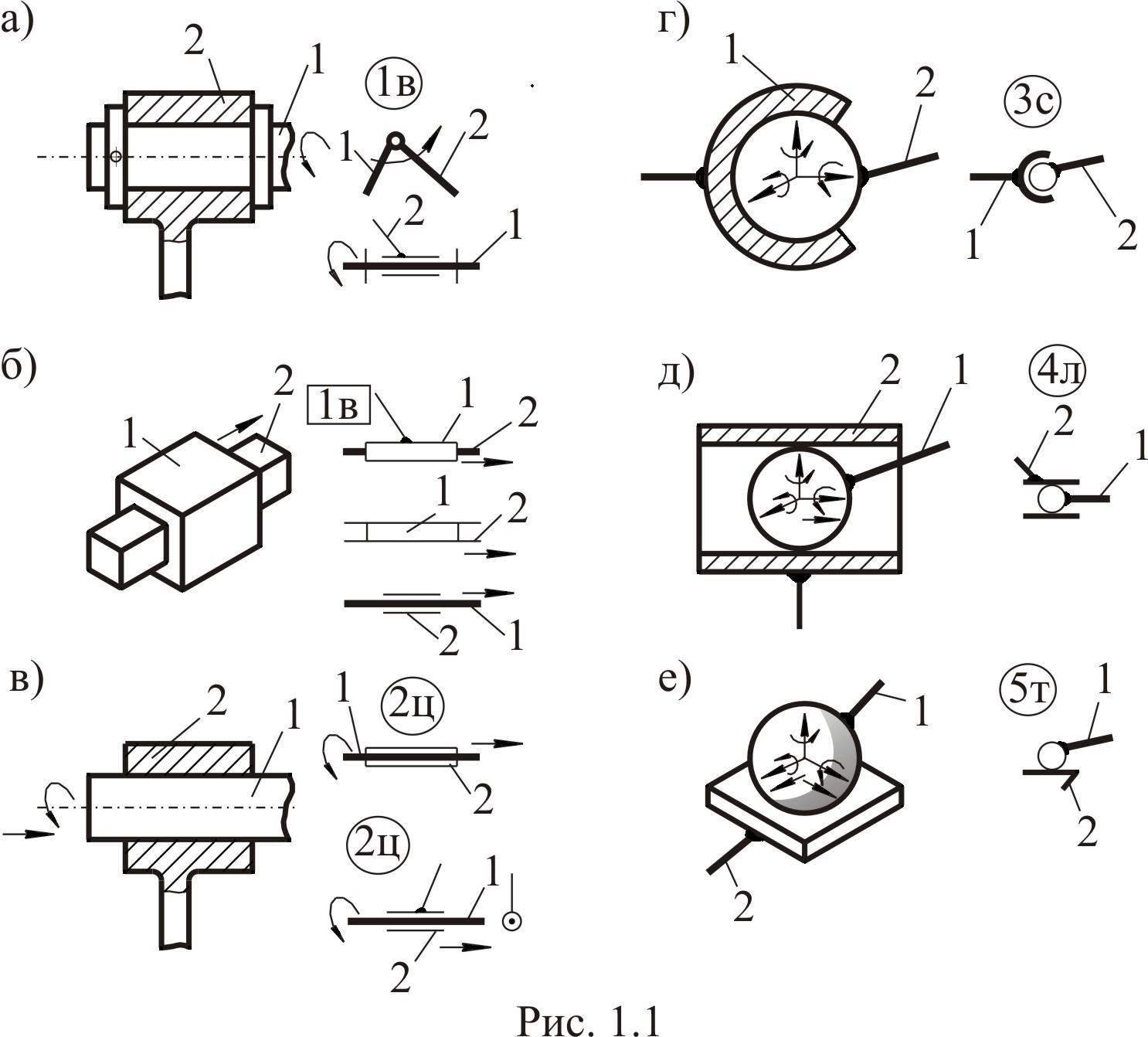
Одноподвижные
кинематические пары V класса (Н=1, S=5)
могут быть двух видов: одноподвижная
вращательная пара (условное обозначение
![]() ,
рис. 1.1, а) допускает лишь одно
относительное вращательное движение
звеньев вокруг оси (показано стрелкой);
звенья 1 и 2 соприкасаются по цилиндрической
поверхности; следовательно, это низшая
пара, замкнута геометрически. Роль такой
кинематической пары выполняет более
сложная конструкция - шарикоподшипник.
,
рис. 1.1, а) допускает лишь одно
относительное вращательное движение
звеньев вокруг оси (показано стрелкой);
звенья 1 и 2 соприкасаются по цилиндрической
поверхности; следовательно, это низшая
пара, замкнута геометрически. Роль такой
кинематической пары выполняет более
сложная конструкция - шарикоподшипник.
Одноподвижная
поступательная кинематическая пара V
класса (условное обозначение
![]() ,
рис. 1.1, б) с геометрическим замыканием,
низшая, допускает лишь одно прямолинейное
поступательное относительное движение
звеньев.
,
рис. 1.1, б) с геометрическим замыканием,
низшая, допускает лишь одно прямолинейное
поступательное относительное движение
звеньев.
Двухподвижная
цилиндрическая кинематическая пара IV
класса (![]() ,
,
![]() ,
условное обозначение
,
условное обозначение
![]() ,
рис. 1.1, в) с геометрическим замыканием,
низшая, допускает независимые относительные
движения звеньев – вращательное вокруг
оси и поступательное вдоль оси
кинематической пары.
,
рис. 1.1, в) с геометрическим замыканием,
низшая, допускает независимые относительные
движения звеньев – вращательное вокруг
оси и поступательное вдоль оси
кинематической пары.
Трехподвижная
сферическая кинематическая пара III
класса (![]() ,
,
![]() ,
условное обозначение
,
условное обозначение
![]() ,
рис. 1.1, г) с геометрическим замыканием,
низшая, допускает три независимых
относительных вращения звеньев вокруг
осей x, y, z.
,
рис. 1.1, г) с геометрическим замыканием,
низшая, допускает три независимых
относительных вращения звеньев вокруг
осей x, y, z.
Четырехподвижная
линейная кинематическая пара II класса
(![]() ,
,
![]() )
и пятиподвижная точечная кинематическая
пара I класса (
)
и пятиподвижная точечная кинематическая
пара I класса (![]() ,
,
![]() )
и их условные обозначения (
)
и их условные обозначения (![]() и
и
![]() ,
даны на рис. 1.1, д,е). Возможные независимые
относительные движения звеньев
(вращательные и поступательные) показаны
стрелками. Это высшие пары, поскольку
контакт элементов звеньев линейный
(шар в цилиндре) и точечный (шар на
плоскости). Пара
,
даны на рис. 1.1, д,е). Возможные независимые
относительные движения звеньев
(вращательные и поступательные) показаны
стрелками. Это высшие пары, поскольку
контакт элементов звеньев линейный
(шар в цилиндре) и точечный (шар на
плоскости). Пара
![]() – с геометрическим замыканием, а пара
– с геометрическим замыканием, а пара
![]() требует силового замыкания.
требует силового замыкания.
Преимуществом низших кинематических пар по сравнению с высшими является возможность передачи больших сил, поскольку контактная поверхность соприкасающихся звеньев низшей пары может быть весьма значительной. Применение высших пар позволяет уменьшить трение в машинах (пример – шариковый или роликовый подшипник), а также получить самые различные законы движения выходного звена механизма путем придания определенной формы звеньям, образующим высшую пару.