

3.4. Сар с регулятором с гибкой связью
Устранить наличие статической ошибки при сохранении удовлетворительной динамики процесса управления позволят использование регуляторов с гибкой обратной связью (рисунок 3.10).

Рисунок 3.10 - Схема регулятора непрямого действия
с гибкой обратной связью
В отличии рассматриваемого ранее регулятора с гибкой обратной связью, действующей независимо от времени, сигнал гибкой обратной зависит от скорости изменения управляющего воздействия регулятора, то есть действует по времени. С этой целью в тягу обратной связи устанавливается устройство 6, так называемый «изодром». Он представляет собой гидроцилиндр, корпус которого связан с точкой «с» рычага a-b-c и пружины двухстороннего действия. Внутренний поршень изодрома соединен с поршнем силового гидроцилиндра. Поршень изодрома имеет дросселирующее отверстие сообщающее его полости между собой. При отклонении частоты вращения ротора двигателя, как и в рассматриваемой ранее схеме, точка «b» рычага a-b-c смещается, вызывая перемещение поршня силового цилиндра и изменяя расход топлива на входе в двигатель. Перемещение поршня силового цилиндра, в свою очередь вызывает смещение внутреннего поршня изодрома. Если изменение расхода топлива происходит достаточно быстро, жидкость из одной полости изодрома не успевает перетекать в другую. Корпус изодрома, а с ним и точка «с» перемещаются, сжимая или растягивая пружину. Обратная связь в данный момент времени работает как жесткая и обеспечивает хорошую динамику процесса регулирования. По окончании переходного процесса скорость изменения расхода топлива снижается. Под действием силы пружины жидкость из одной полости изодрома через отверстия перетекает в другую полость. Процесс регулирования заканчивается, когда при неизменном расходе топлива, точка «с» становиться в единственном первоначальном положении, а значит и точка «a» остается так же в первоначальном положении. При этом фактическое значение частоты вращения грузиков сохраняется на первоначальном уровне без статической ошибки. Поэтому такой регулятор носит название астатического, то есть не имеющего статической ошибки.
Процессы регулирования при увеличении нагрузки на двигатель могут протекать так, как это представлено на рисунке 3.11.
|
|
|
Рисунок 3.11 - Переходные процессы в САР с регулятором с гибкой обратной связью |
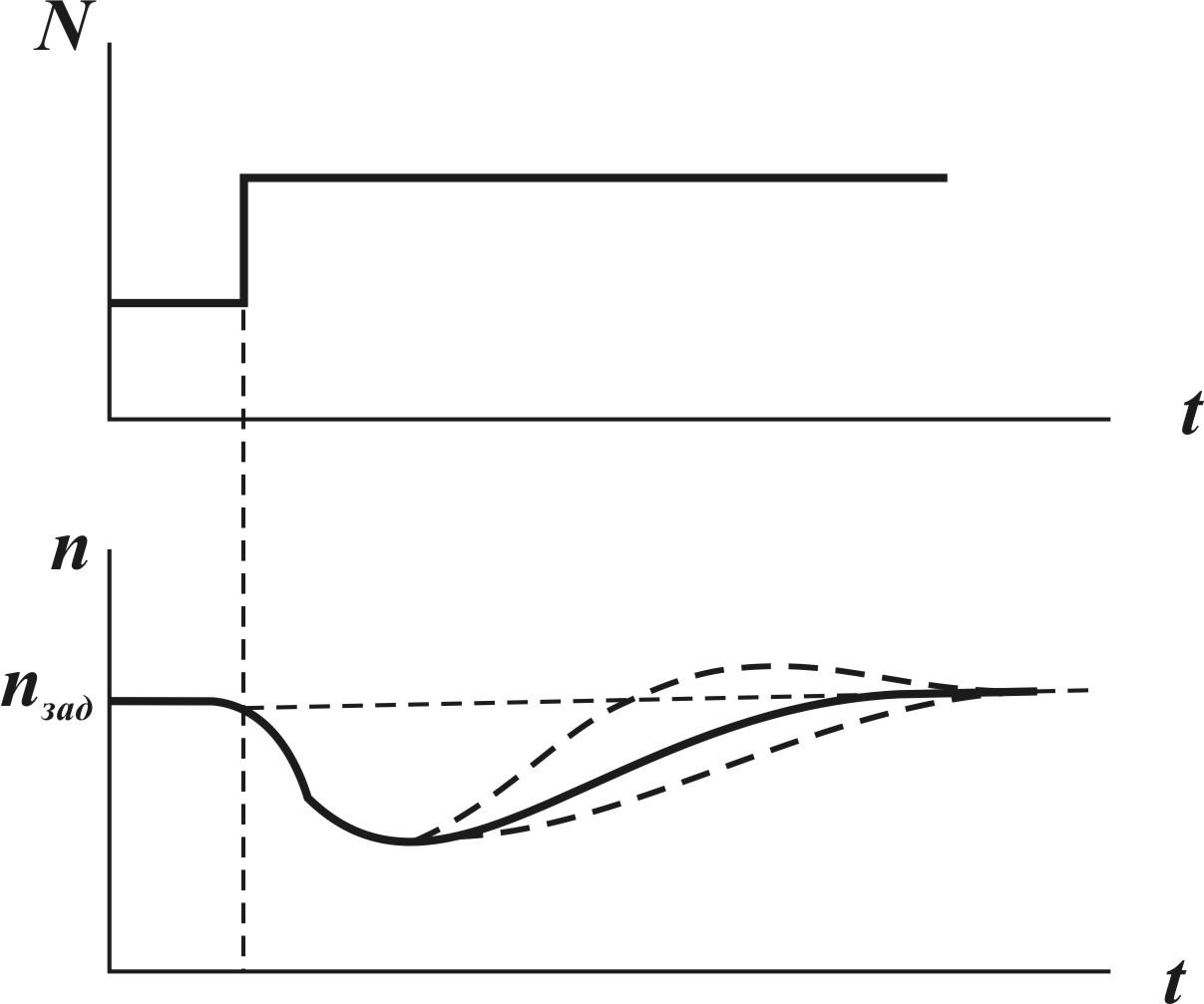
Конкретный вид переходного процесса зависит от параметров регулятора (размеров, жесткости пружины изодрома, сопротивления жиклера и др.) При соответствующем соотношении этих параметров может быть обеспечена наилучшая форма переходного процесса.
4. Практическая часть выполнения исследований
Исследования выполняются в несколько этапов.
На жестком диске компьютера по адресу D:\people\1Санчугов находится несколько папок в которых помещены файлы Simulink (см. рисунок 4.1).
|
|
|
Рисунок 4.1 – Внешний вид папок |

Номер папки соответствует типу системы регулирования:
I – собственно двигатель как объект управления;
II – регулятор прямого действия;
III – астатический регулятор непрямого действия;
IV – статический регулятор непрямого действия;
V – регулятор непрямого действия с гибкой обратной связью (изодромный).
На первоначальном
этапе исследуются переходная характеристика
автономного ГТД (папка I)
при ступенчатом изменении расхода
топлива. Переходный процесс изображается
на экране монитора. С целью сокращения
времени и повышения наглядности,
исследования проводятся для трех
идентичных вариантов структурных схем,
отличающимися различными постоянными
времени (Tд)
и коэффициентами усиления (Kд).
Для этого открывается соответствующий
файл (![]() или
или![]() )
папкиI
и вводится значение коэффициентов,
заданных преподавателем. При этом
значения второго коэффициента остается
постоянным. Полученные графики переходного
процесса позволяют сделать анализ
влияния коэффициентов (Tд
или
Kд)
на свойства ГТД как объекта управления
по частоте вращения.
)
папкиI
и вводится значение коэффициентов,
заданных преподавателем. При этом
значения второго коэффициента остается
постоянным. Полученные графики переходного
процесса позволяют сделать анализ
влияния коэффициентов (Tд
или
Kд)
на свойства ГТД как объекта управления
по частоте вращения.
|
|
|
Рисунок 4.2 – Внешний вид файлов в папке I |

На следующих этапах
проводятся исследования САР с регуляторами
рассмотренных ранее схем. Папки II,
III,
IV,
V
содержат файлы
![]() и
и![]() (рисунок 4.3).
(рисунок 4.3).
|
|
|
Рисунок 4.3 – Внешний вид файлов в папках II, III, IV, V |

При этом исследуется влияние параметров регуляторов, значение которых достаточно просто изменяются. Для чего двойным щелчком открывается соответствующий блок и вводится новое значение коэффициента.
|
|
|
Рисунок 4.4 – Внешний вид структурной схемы регулятора в приложении Simulink |

Исследование влияния внешних нагрузок, действующих на двигатель, смоделированно ступенчатым изменением нагрузки. Это позволяет наглядно представить особенности работы регуляторов различных схем. Величины отклонения в исходном варианте программного обеспечения составляют 10 процентов.
При любом переходе к следующему варианту регулятора предыдущие параметры структурных схем остаются неизменными.
Отчет о выполненных исследованиях должен содержать:
цель исследований;
структурные схемы ГТД и систем автоматического регулирования с параметрами исследуемых схем;
переходные характеристики исследуемых систем регулирования;
выводы об особенностях работы, статической ошибке и других параметрах работы различных регуляторах частоты вращения.