

9.2.2. Скорости и ускорения точек вращающегося тела
1. Скорости точек тела.
Точка М твердого тела (рис. 2.2),
находящаяся на расстоянииhот оси вращения, при вращении описывает
окружность радиусаh,
плоскость которой перпендикулярна оси
вращения, а центрСлежит на самой
оси. За времяdtтело
совершает поворот на уголdφ,
а точкаМпередвигается на![]() ,
тогда
,
тогда![]() или
или
|
|
(32) |
Эта скорость Vв отличие от угловой скорости тела называетсялинейнойилиокружнойскорость точкиМ.
Таким образом, числовое значение скорости точки вращающегося твердого тела равно произведению угловой скорости тела на расстояние её до оси вращения.
Направлена скорость по касательной к описываемой точкой окружности или перпендикулярна плоскости, проходящей через ось вращения и точку М.
Так как для всех точек тела угловая
скорость
![]() имеет в данный момент времени
имеет в данный момент времени
одно и то же значение, то скорости точек вращающегося тела пропорциональны их
расстояниям от оси вращения.
Поле скоростей точек вращающегося твердого тела показано на рис. 2.3.
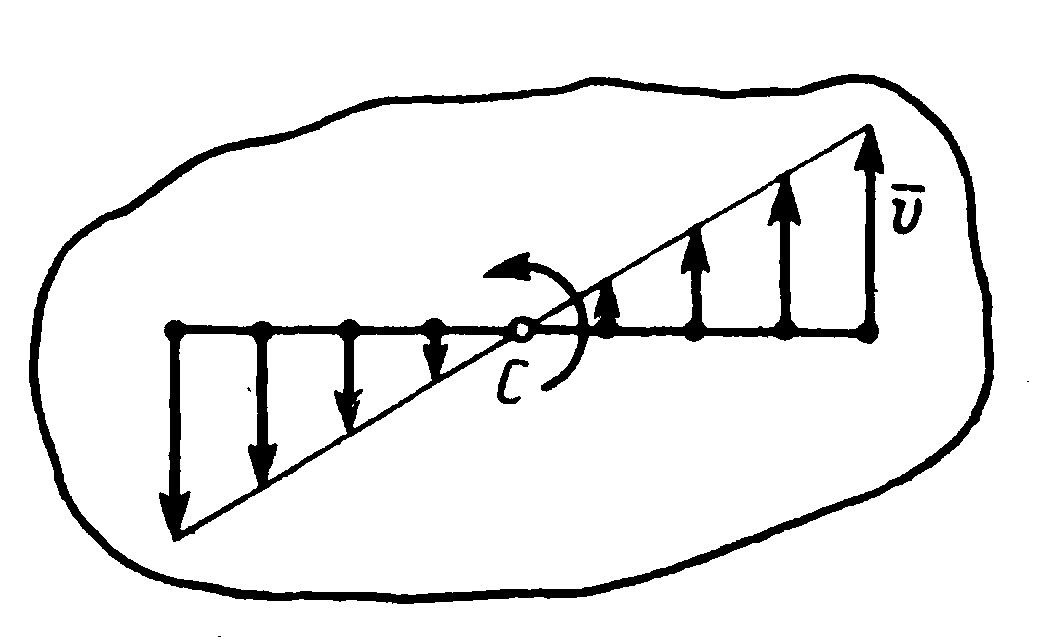
Рисунок 2.3
2. Ускорение точек тела.
Для нахождения ускорения точки Мвоспользуемся формулами (20), но ρ=h
и![]() ,
тогда
,
тогда![]() ,
,![]() или
или
|
|
(33) |
Касательное ускорение
![]() направлено по касательной к траектории
в сторону углового ускорения; нормальное
ускорение
направлено по касательной к траектории
в сторону углового ускорения; нормальное
ускорение![]() всегда направлена по радиусуМС к
оси вращения (рис. 2.4).
всегда направлена по радиусуМС к
оси вращения (рис. 2.4).
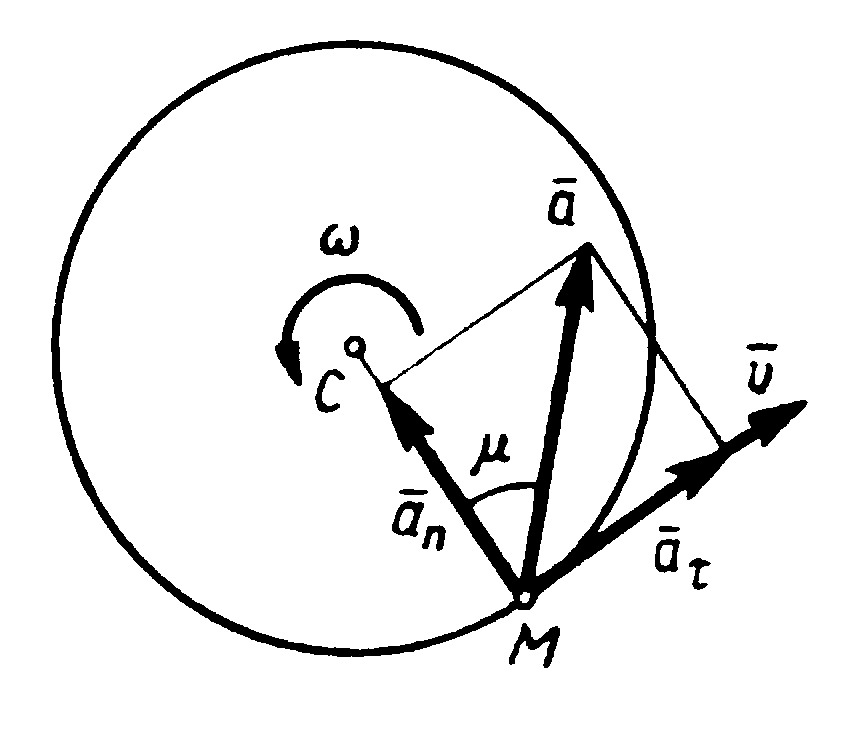
Рисунок 2.4
Полное ускорение точки М будет
|
|
(34) |
Отклонение вектора полного ускорения
от радиуса описываемой окружности
определяется углом
![]() ,
который вычисляется по формуле:
,
который вычисляется по формуле:![]() .
Подставляя значения
.
Подставляя значения![]() и
и![]() ,
получим
,
получим
|
|
(35) |
Так как ε иωдля всех точек тела
в данный момент времени одно и тоже
значение , то из формул![]() и
и![]() следует, что ускорения всех точек
вращающегося тела пропорционально их
расстояниям от оси вращения и образуют
в данный момент времени один и тот же
уголμс радиусами описываемых ими
окружностей.
следует, что ускорения всех точек
вращающегося тела пропорционально их
расстояниям от оси вращения и образуют
в данный момент времени один и тот же
уголμс радиусами описываемых ими
окружностей.
Чтобы найти выражения непосредственно
для векторов
![]() и
и![]() проведем из произвольной точкиО осиАВрадиус-вектор
проведем из произвольной точкиО осиАВрадиус-вектор![]() точкиМ(рис.2.5). Тогда
точкиМ(рис.2.5). Тогда![]() и по формуле
и по формуле![]()
![]() или
или![]() .
.
Таким образом, модуль векторного
произведения
![]() равен модулю скорости точкиМ.
Направления векторов
равен модулю скорости точкиМ.
Направления векторов![]() и
и![]() тоже совпадают (оба они перпендикулярны
плоскостиОМВ) и размерности их
одинаковы. Следовательно,
тоже совпадают (оба они перпендикулярны
плоскостиОМВ) и размерности их
одинаковы. Следовательно,
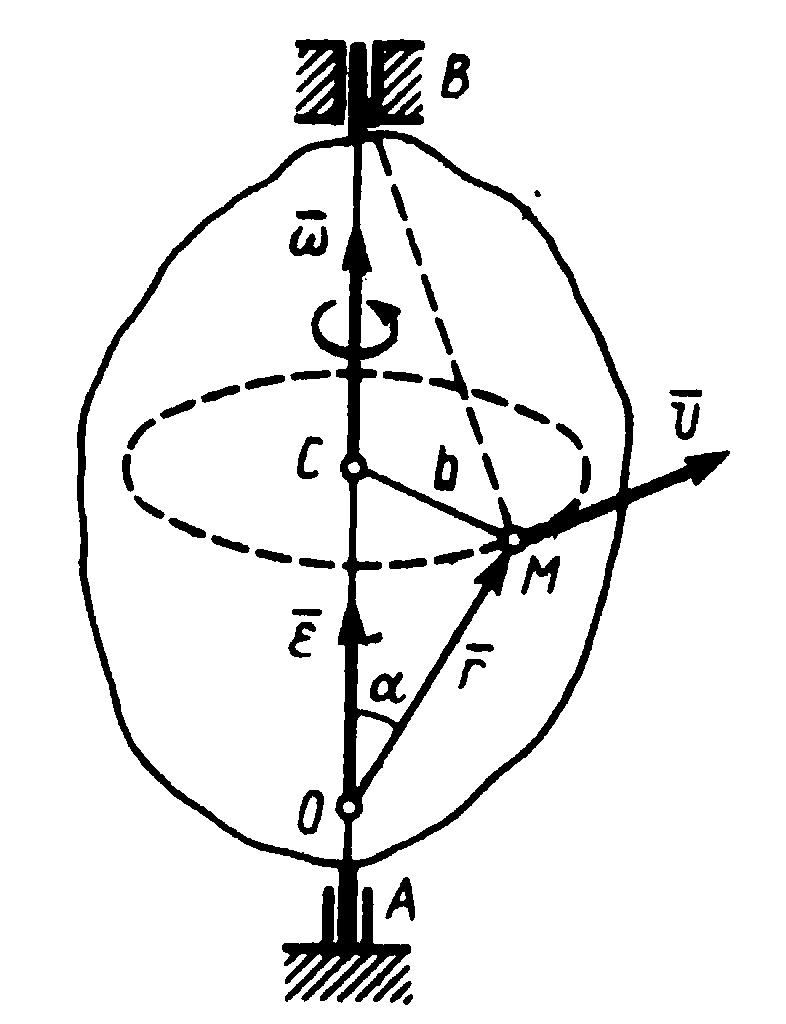
Рисунок 2.5
|
|
(36) |
т.е. вектор скорости любой точки вращающегося тела равен векторному произведению угловой скорости тела на радиус-вектор этой точки.Эту формулу называют формулой Эйлера.
Беря от обеих частей этого равенства производные по времени. Получим
![]() или
или
|
|
(37) |
Полученная формула определяет вектор ускорения любой точки вращающегося тела.
Вектор
![]() направлен, как и вектор
направлен, как и вектор![]() ,
т.е. по касательной к траектории точкиМ, а
,
т.е. по касательной к траектории точкиМ, а![]() .
Вектор же
.
Вектор же![]() направлен вдольМС, т.е. по нормали
к траектории точки М, а
направлен вдольМС, т.е. по нормали
к траектории точки М, а![]() ,
так как
,
так как![]() .
Учитывая все эти результаты, а также
формулы
.
Учитывая все эти результаты, а также
формулы![]() ,
,![]() ,
заключаем, что
,
заключаем, что![]() и
и![]() .
.