

3. Цифровые узлы устройств цифровой обработки сигналов
Введение
В этой теме рассматривается цифровая реализация типовых узлов устройств цифровой обработки сигналов, таких как генераторы сигналов, преобразователи частоты, амплитудные, частотные и фазовые детекторы.
В связи с широким применением квадратурной обработки сигналов актуальным является изучение 90 – градусных фазорасщепителей.
Поэтому данная тема включает следующие разделы:
3.1.Нерекурсивные 90-градусные фазорасщепители
3.2. Всепропускающая цифровая цепь
3.3. Рекурсивный 90 – градусный фазорасщепитель
3.4. Генераторы пилообразных, прямоугольных, треугольных и трапецеидальных
колебаний
3.5.Косинусно-синусные генераторы
3.6. Преобразователи частоты
3.7. Амплитудные детекторы
3.8. Фазовые детекторы
3.9. Частотные детекторы
3.1.Нерекурсивные 90-градусные фазорасщепители
Фазорасщепитель (ФР) представляет собой линейный цифровой узел, имеющий один вход и два выхода. В идеальном 90-градусном ФР составляющие спектра одинаковой частоты двух выходных сигналов имеют равные амплитуды и сдвинуты по фазе на 90 градусов.
На рисунке 3.1 приведена схема нерекурсивного 90-градусного ФР, выполненного на 2K элементах задержки. Входным сигналом является сигнал xn, а двумя выходными - vcn и vsn. В дальнейшем выходы ФР будем называть выходами косинусной (сигнал vcn) и синусной (сигнал vsn) компонент.
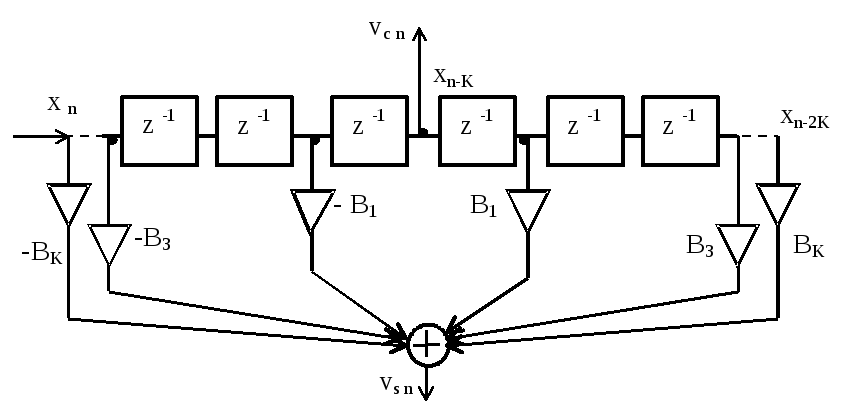
Рисунок 3.1 – Нерекурсивный 90-градусный фазорасщепитель
Определим системную функцию и комплексный коэффициент передачи по выходу косинусной компоненты. Из схемы видно, что
![]() .
.
Z-преобразование косинусной компоненты выходного сигнала связано с Z-преобразованием входного сигнала следующим соотношением
![]() .
.
Системная
функция фазорасщепителя по выходу
косинусной компоненты определяется
отношением Z-преобразования
выходного сигнала
![]() кZ-преобразованию входного
сигнала
кZ-преобразованию входного
сигнала![]() .
.
![]() .
.
Используя
подстановку
![]() ,
где
,
где
![]() ,
найдем комплексный коэффициент передачи
фазорасщепителя по выходу косинусной
компоненты
,
найдем комплексный коэффициент передачи
фазорасщепителя по выходу косинусной
компоненты
![]() .
.
Определим системную функцию и комплексный коэффициент передачи по выходу синусной компоненты. Из схемы видно, что
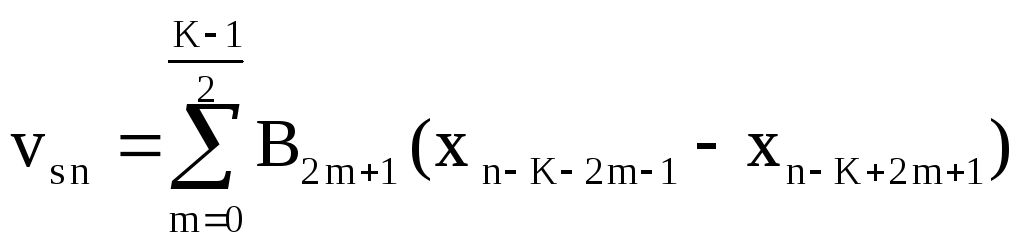
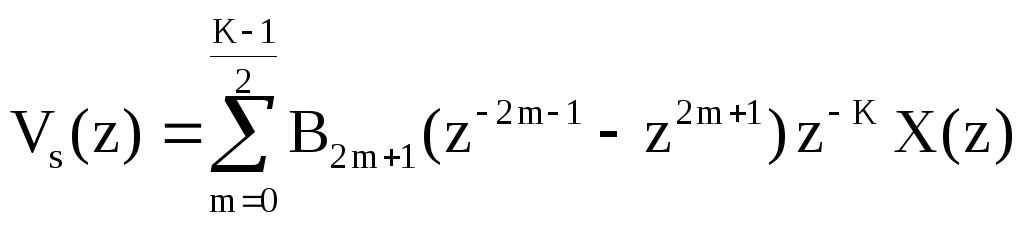
Z-преобразование синусной компоненты выходного сигнала связано сZ-преобразованием входного сигнала следующим соотношением
 .
.
Из последнего соотношения получим
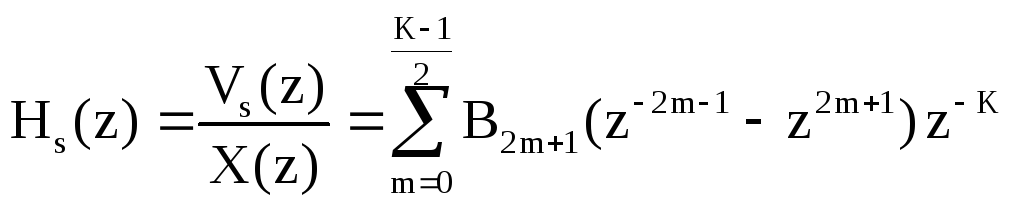 .
.
Используя
подстановку
![]() ,
найдем комплексный коэффициент передачи
фазорасщепителя по выходу синусной
компоненты
,
найдем комплексный коэффициент передачи
фазорасщепителя по выходу синусной
компоненты
 .
.
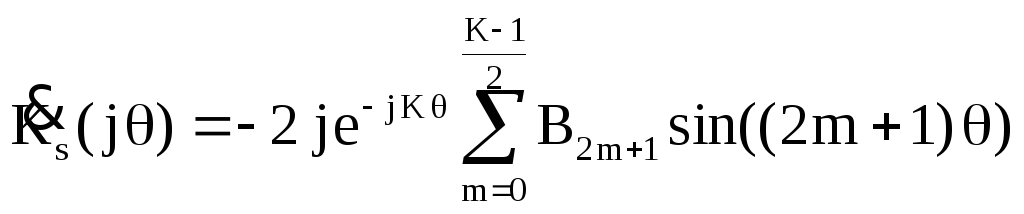
Определим АЧХ и ФЧХ фазорасщепителя по выходам косинусной и синусной компонент
![]() ,
,
 ,
(3.1)
,
(3.1)
![]() ,
,
![]() .
(3.2)
.
(3.2)
Из последних соотношений следует:
Фазочастотные характеристики фазорасщепителя по обоим выходам линейны, а их разность
 .
.АЧХ по выходу синусной компоненты отличается от АЧХ по выходу синусной компоненты.
На рисунке 3.2 показаны АЧХ фазорасщепителя на двух элементах задержки (K=1) приB1=0.5, а на рисунке 3.3 – АЧХ фазорасщепителя на шести элементах задержки (K=3) приB1=0.6,B3=0.1. Из рисунков видно, что при увеличении длины линии задержки полоса пропускания фазорасщепителя по выходу синусной компоненты расширяется, а АЧХ приближается к АЧХ по выходу косинусной компоненты.
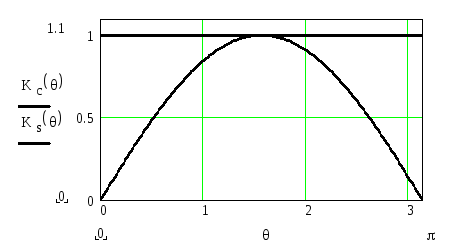
Рисунок 3.2 – АЧХ фазорасщепителя на двух элементах задержки
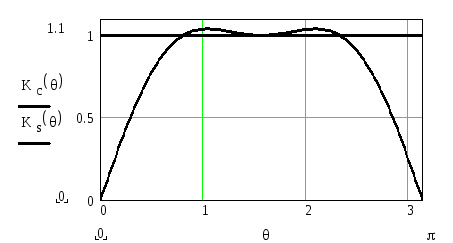
Рисунок 3.3 – АЧХ фазорасщепителя на шести элементах задержки
Дальнейшее увеличение длины линии задержки приближает АЧХ по выходу косинусной компоненты к идеальной АЧХ по выходу синусной компоненты, однако на границах интервала Котельникова коэффициент передачи по выходу синусной компоненты всегда равен нулю, что следует из (3.1).
Таким образом, реальный нерекурсивный ФР отличается от идеального амплитудной погрешностью, которую можно уменьшить за счет увеличения длины линии задержки и оптимального выбора коэффициентов B2m+1.
3.2. Всепропускающая цифровая цепь
На рисунке 3.4 показана цифровая цепь первого порядка, содержащая как рекурсивную, так и нерекурсивную части.
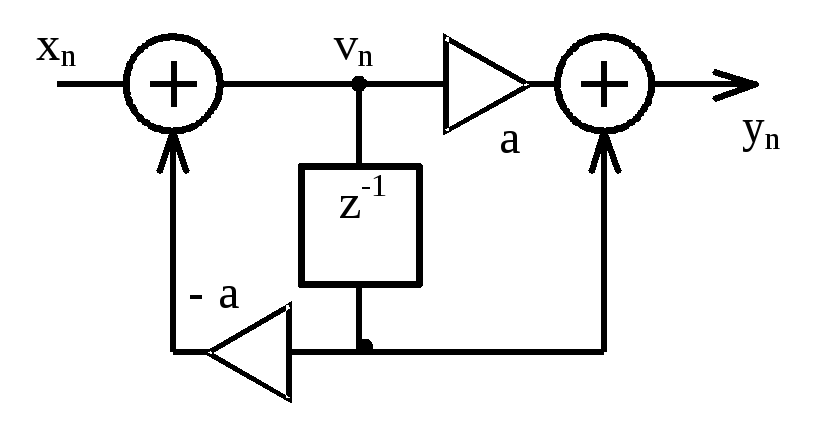
Рисунок 3.4 – Всепропускающая цифровая цепь
Ее системная функция описывается следующим соотношением
![]() .
.
Особенностью этой цепочки является равенство коэффициентов, определяющих свойства рекурсивной и нерекурсивной частей фильтра.
Определим комплексный коэффициент передачи, воспользовавшись подстановкой
![]()
![]() .
.
Из
последнего соотношения следует, что
модуль комплексного коэффициента
передачи равен единице при любых
значениях
![]() .
Именно поэтому данная цифровая цепь
называется всепропускающей.
.
Именно поэтому данная цифровая цепь
называется всепропускающей.
Определим ФЧХ цепи
 .
.
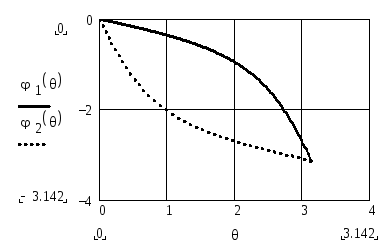
На рисунке 3.5 показаны две ФЧХ при разных значениях коэффициента а.
Рисунок
3.5 – ФЧХ всепропускающих цепей при а =
0.5 (![]() )
и а = -0.5 (
)
и а = -0.5 (![]() )
)
Обе
цепочки имеют нулевой фазовый сдвиг
при
![]() =0
и фазовый сдвиг
=0
и фазовый сдвиг![]() при
при![]() =
=![]() .
Однако на других частотах они расходятся
так, что в ограниченном частотном
диапазоне существует примерно постоянная
разность фазовых сдвигов, вносимых ими.
Это позволяет использовать всепропускающие
цепи для построения рекурсивных
фазорасщепителей.
.
Однако на других частотах они расходятся
так, что в ограниченном частотном
диапазоне существует примерно постоянная
разность фазовых сдвигов, вносимых ими.
Это позволяет использовать всепропускающие
цепи для построения рекурсивных
фазорасщепителей.
3.3. Рекурсивный 90 – градусный фазорасщепитель
На рисунке 3.6 показан фазорасщепитель, выполненный на двух всепропускающих цепях, имеющих общий вход (рисунок 3.6).
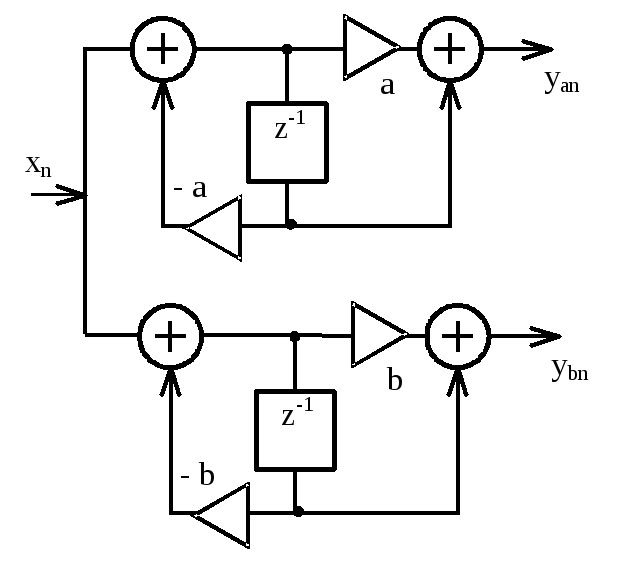
Рисунок 3.6 – 90-градусный фазорасщепитель
Комплексные коэффициенты передачи двух всепропускающих цепей, образующих ФР, определяются следующими соотношениями
![]() .
.
Определим разность фазовых сдвигов, вносимых всепропускающими цепями
 .
.
Умножив
числитель и знаменатель дроби под знаком
аргумента на
![]() ,
получим
,
получим
 ,
,
где
![]() .
.
Экстремум
функции
![]() имеет место при выполнении условия
имеет место при выполнении условия
![]() .
.
Экстремальное значение функции равно
![]() .
.
При
наличии одной точки экстремума для
получения равновеликих по абсолютной
величине отклонений
![]() от требуемого значения
от требуемого значения![]() необходимо выполнить два условия:
необходимо выполнить два условия:
![]() ,
,
![]() ,
,
где
![]() и
и![]() - нижняя и верхняя границы расчетного
интервала.
- нижняя и верхняя границы расчетного
интервала.
Из первого условия находится константа
 .
.
Второе условие приводит к трансцендентному уравнению, позволяющему определить константу с
![]() .
.
По известным коэффициентам с и dнаходятся коэффициенты системной функции
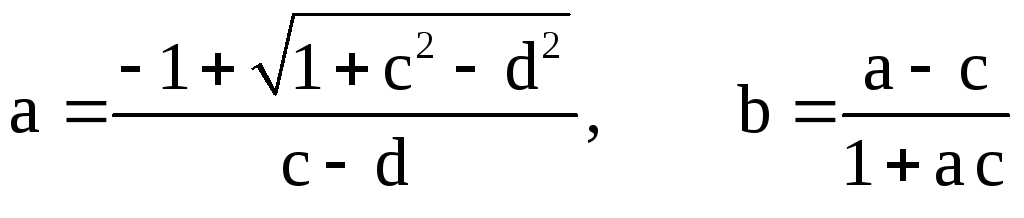 .
.
На
рисунке 3.7 приведена зависимость фазового
сдвига между выходными сигналами ФР
при
![]() и
и![]() .
.
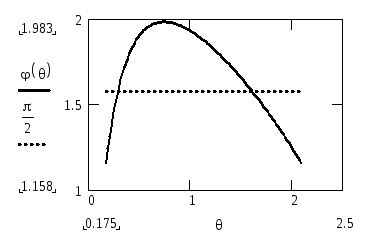
Рисунок 3.7 – Зависимость фазового сдвига между выходными сигналами ФР,
содержащего по одной всепропускающей цепи в каждой ветви
Из него видно, что фазовая погрешность имеет равновеликие пульсации в заданном диапазоне частот. Максимальная величина погрешности составляет 26%. Для уменьшения погрешности нужно увеличивать количество всепропускающих цепочек.
На
рисунке 3.8 показаны зависимости фазового
сдвига между выходными сигналами
фазорасщепителей, содержащих по 2 (а) и
по 3 (б) фазосдвигающих цепи в каждой
ветви. В интервале от
![]() до
до![]() максимальные фазовые погрешности
менее 3% и 0.3% соответственно.
максимальные фазовые погрешности
менее 3% и 0.3% соответственно.
a)

б)
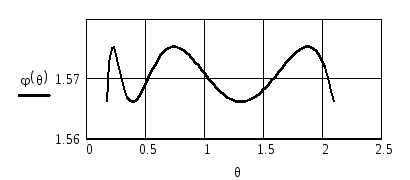
Рисунок 3.8 - Зависимости фазового сдвига между выходными сигналами ФР,
содержащих по 2 (а) и по 3 (б) всепропускающих цепи в каждой ветви
Применение всепропускающих цепей для построения рекурсивного ФР обеспечивает отсутствие у этих ФР амплитудной погрешности.
3.4. Генераторы пилообразных, прямоугольных, треугольных и
трапецеидальных колебаний
На рисунке 3.9 точками показаны отсчеты пилообразного колебания, которое при A>0 формируется следующим образом:

Записанное соотношение справедливо в дискретные моменты времени.
Если рассматривать не дискретные моменты времени, а порядковые номера отсчетов, то это соотношение можно записать так


Рисунок 3.9 – Пилообразное колебание
Из
рисунка видно, что в периоде пилообразного
колебания содержится
![]() интервалов
дискретизации, следовательно, периодTи частотаFпилообразного колебания равны
интервалов
дискретизации, следовательно, периодTи частотаFпилообразного колебания равны
![]()
Частота
пилы прямо пропорциональна частоте
дискретизации и отношению констант
![]() .
.
Рисунок
3.10 показывает, как из пилообразного
колебания z
получается последовательность
прямоугольных импульсов I
с периодом, равным периоду пилы,
длительностью
![]() ,
максимальным уровнемI1,
минимальным уровнем I2
,
максимальным уровнемI1,
минимальным уровнем I2
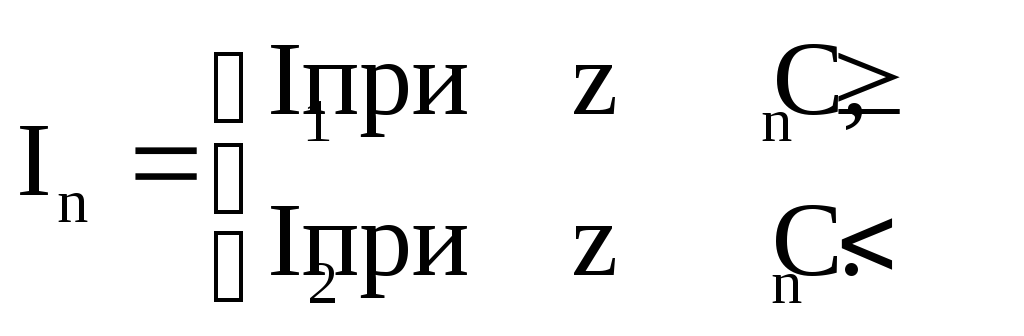

Рисунок 3.10 – Формирование последовательности прямоугольных импульсов
из пилообразного колебания
Из подобия заштрихованного треугольника и треугольника - положительного полупериода пилы следует что
![]()
Откуда длительность импульса равна
![]()
Таким образом, изменяя константу С, можно регулировать длительность импульса.
Из пилы формируется треугольное колебание (рисунок 3.11) в соответствии со следующим соотношением
![]()
Это двухполярное треугольное колебание может быть использовано в качестве грубой аппроксимации синусоиды. Степень соответствия его синусоиде можно оценить по уровню высших гармоник в спектре этого колебания. Спектр содержит только нечетные гармоники, причем коэффициент третьей гармоники равен кГ3 = 10%, а коэффициент пятой гармоники кГ5 = 4%.
Из треугольного колебания формируется трапецеидальное колебание согласно соотношению

![]()
где B > 2.
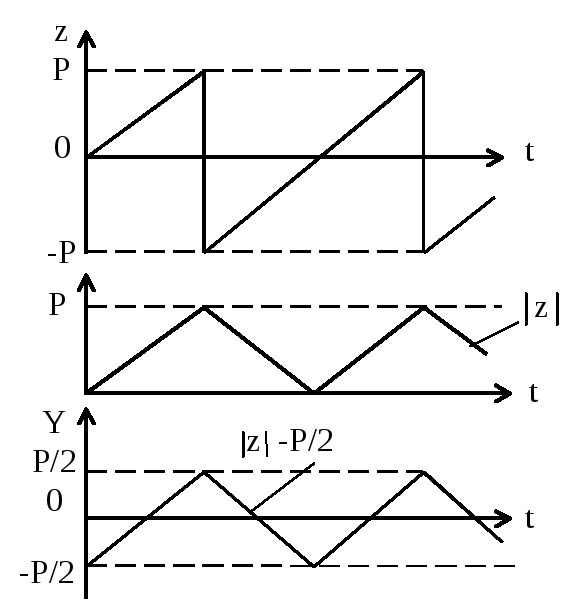
Рисунок 3.11 – Формирование треугольных колебаний
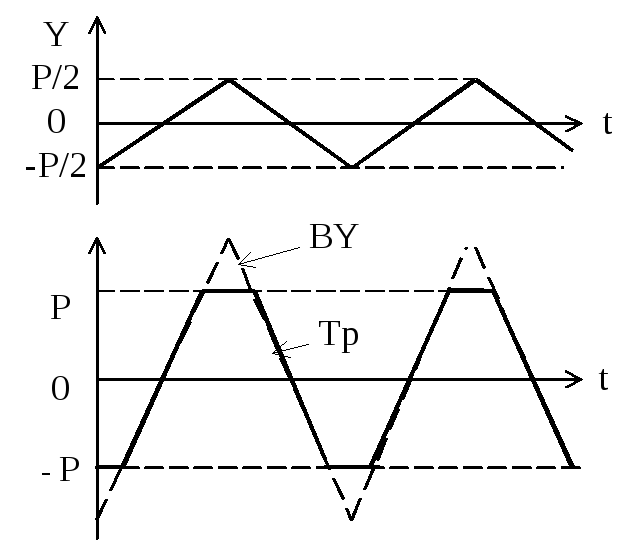
Рисунок 3.12 – Формирование трапецеидального колебания
При B = 3 трапеция является хорошей аппроксимацией синусоиды: коэффициент третьей гармоники равен нулю, коэффициент пятой гармоники кГ5 = 4%.
3.5.Косинусно-синусные генераторы
3.5.1.Косинусно-синусный генератор с полиномиальной
аппроксимацией отсчетов выходных колебаний
Для формирования двух квадратурных компонент на выходе генератора используются два пилообразных колебания, сдвинутых друг относительно друга на четверть периода (рисунок 3.13). Исходным является одно из пилообразных колебаний при P=1 (в рассматриваемом случае zc). Второе получается из него следующим образом
Из двух пилообразных колебаний формируются два треугольных описанным выше способом
![]()
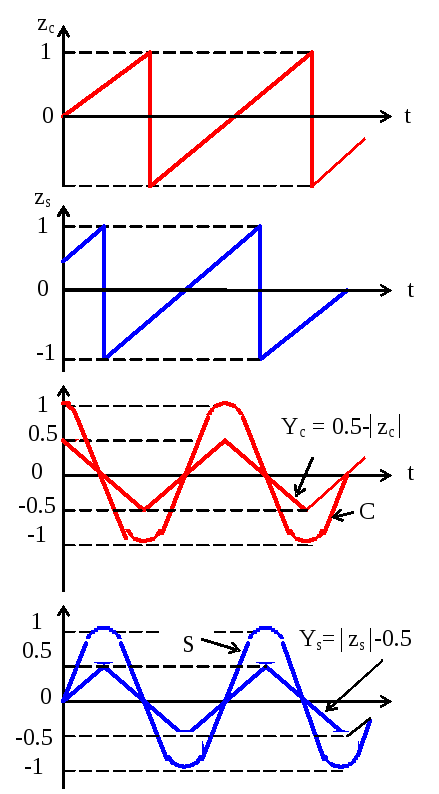
Рисунок 3.13 – Формирование косинусной и синусной компонент из двух
пилообразных колебаний
Для формирования из треугольных колебаний синусоидальных используется функциональное преобразование F(Y), представляющее собой полином третьей или пятой степени:
![]()
где D = 0.70738,
![]()
где D1= 0.745966, D3 = - 0.305500, D5 = 0.138149.
Отсчёты генерируемых колебаний определяются следующим образом:
![]()
При использовании полинома третьей степени коэффициент третьей гармоники равен кГ3 = 0.5%, коэффициент пятой гармоники кГ5 = 0.1%.
При использовании полинома пятой степени кГ3 =0.005%, кГ5 = 0.005%.
Для дальнейшего уменьшения коэффициентов гармоник используются полиномы более высокого порядка [3].
3.5.2.Косинусно-синусный генератор с табличной организацией
отсчетов выходных колебаний
Функция
sin(π
z)
при
![]() преобразует пилообразное колебание в
синусоидальное (рисунок 3.14). Реализуется
такой генератор путем записи табличных
значений этой функции в постоянное
запоминающее устройство (ПЗУ). Аргумент
функции задает адрес ячейки, в которой
хранится значение функции. Шаг изменения
аргумента равен
преобразует пилообразное колебание в
синусоидальное (рисунок 3.14). Реализуется
такой генератор путем записи табличных
значений этой функции в постоянное
запоминающее устройство (ПЗУ). Аргумент
функции задает адрес ячейки, в которой
хранится значение функции. Шаг изменения
аргумента равен![]() ,
гдеm-количество
разрядов адреса ПЗУ.
,
гдеm-количество
разрядов адреса ПЗУ.
Косинусную компоненту можно получить двумя способами:
c помощью функции cos(π z) и той же пилы, которая используется для формирования синусной компоненты;
c использованием только одной функции и двух пилообразных колебаний, сдвинутых друг относительно друга на четверть периода.

Рисунок 3.14 – Формирование синусоидального колебания с использованием
заданной таблично функции sin(πz)
3.6. Преобразователи частоты
Преобразователь частоты предназначен для переноса спектра входного сигнала из одной области частот в другую без изменения формы спектра.
На рисунке 3.15 показан преобразователь частоты, содержащий перемножитель, генератор синусоидальных колебаний Г и фильтр.
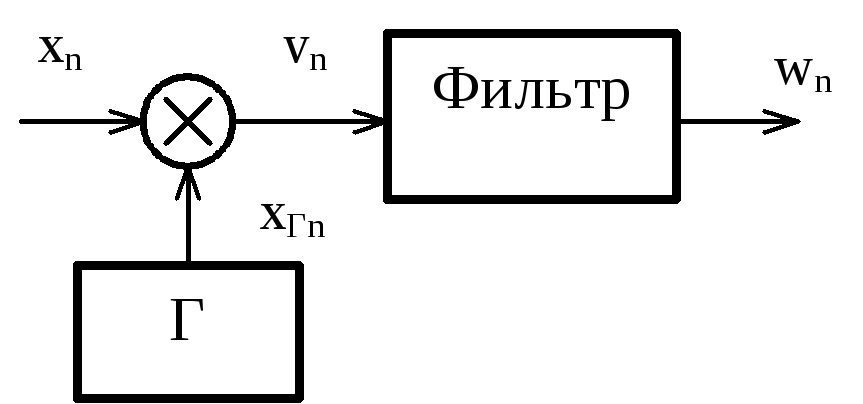
Рисунок 3.15 – Преобразователь частоты с выходным фильтром
Пусть сигнал на входе преобразователя описывается соотношением
![]()
где Xn и φn – изменяющиеся во времени амплитуда и фаза входного сигнала соответственно, ω – частота сигнала.
Пусть на выходе генератора действует колебание вида
![]()
где XГ – постоянная амплитуда, ωГ – частота генерируемого колебания.
На выходе перемножителя действует сигнал
![]()
Если частотой выходного сигнала преобразователя является частота ω – ωГ, то первое слагаемое описывает полезный продукт преобразования, а второе – побочный. Для удаления побочного продукта преобразования можно использовать или полосовой фильтр с центральной частотой полосы пропускания, равной ω – ωГ, или ФНЧ, подавляющий составляющую частоты ω + ωГ.
Поэтому выходной сигнал преобразователя равен
![]()
где
KФ
– коэффициент передачи фильтра для
полезного продукта преобразования,
![]() -постоянный
фазовый сдвиг, вносимый фильтром на
частоте
-постоянный
фазовый сдвиг, вносимый фильтром на
частоте![]() .
Полученное соотношение справедливо,
если коэффициент передачи фильтра для
побочного продукта преобразования
равен нулю. В противном случае на выходе
преобразователя будет действовать
ослабленная составляющая на частоте ω
+ ωГ.
.
Полученное соотношение справедливо,
если коэффициент передачи фильтра для
побочного продукта преобразования
равен нулю. В противном случае на выходе
преобразователя будет действовать
ослабленная составляющая на частоте ω
+ ωГ.
Из последнего соотношения видно, что изменяющиеся во времени амплитуда и фаза выходного сигнала преобразователя частоты связаны линейными соотношениями с амплитудой и фазой входного сигнала. Это означает, что преобразование частоты не изменяет закона модуляции как при амплитудной, так и при угловой модуляции.
На рисунке 3.16 приведена схема квадратурного преобразователя частоты, содержащего 90-градусный фазорасщепитель и косинусно-синусный генератор.
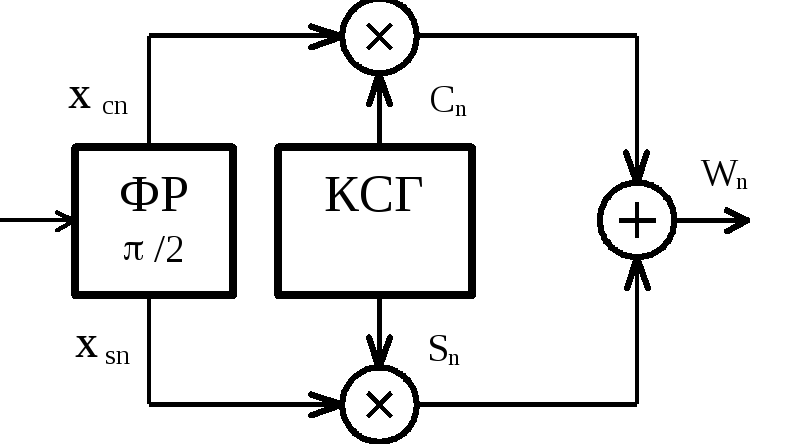
Рисунок 3.16 – Квадратурный преобразователь частоты
Пусть на выходах фазоращепителя действуют две квадратурные составляющие входного сигнала
![]()
Пусть на выходах косинусно-синусного генератора существуют колебания
![]()
Тогда выходной сигнал преобразователя определится соотношением
![]()
Таким образом, в случае идеальных ФР и КСГ на выходе преобразователя получается только полезный продукт преобразования. При наличии погрешностей этих узлов наряду с полезным продуктом преобразования будет существовать ослабленный побочный продукт преобразования.
3.7. Амплитудные детекторы
3.7.1.Амплитудный детектор - выпрямитель
Амплитудный детектор предназначен для формирования выходного сигнала, повторяющего закон изменения амплитуды входного сигнала.
На рисунке 3.17 дано графическое представление алгоритма функционирования цифрового амплитудного детектора – выпрямителя.Детектор состоит из блока определения абсолютного значения отсчета входного сигналаABSи фильтра нижних частот.
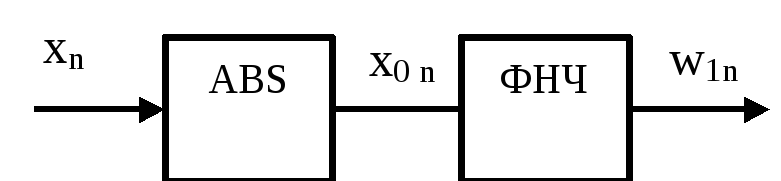
Рисунок 3.17 – Амплитудный детектор-выпрямитель
Пусть на входе детектора действует АМ сигнал
![]() ,
,
где
![]() -
амплитуда входного сигнала, изменяющаяся
во времени в процессе модуляции,
-
амплитуда входного сигнала, изменяющаяся
во времени в процессе модуляции,
![]() -
частота несущей,
-
частота несущей,
![]() -
частота дискретизации,n– порядковый номер отсчета,
-
частота дискретизации,n– порядковый номер отсчета,![]() -
начальная фаза несущей.
-
начальная фаза несущей.
Выходной сигнал блока ABSописывается следующим соотношением
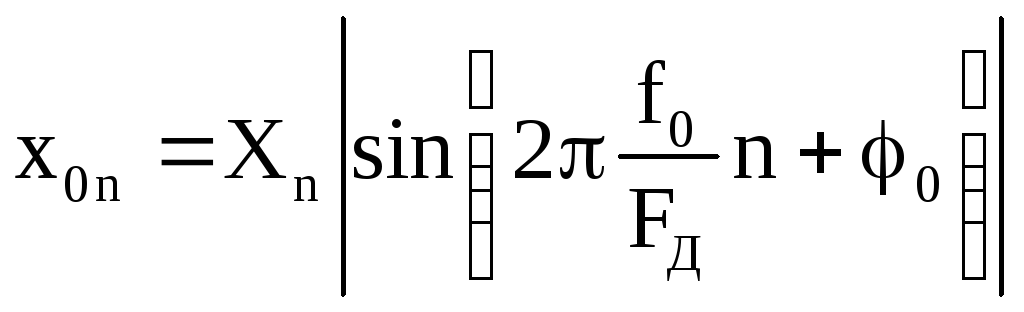 .
.
Из
последнего соотношения следует, что
для получения сигнала, повторяющего
закон изменения амплитуды
![]() ,
нужно выделить постоянную составляющую
функции
,
нужно выделить постоянную составляющую
функции
![]() .
.
Поэтому
необходим фильтр нижних частот.
Достоинством детектора-выпрямителя
является его простота, а недостатком –
зависимость постоянной составляющей
функции
![]() от
от![]() .
.
На
рисунке 3.18 показана функция
![]() при
при
![]() и
и
![]() .
Из него видно, что постоянная составляющая
этой функции дискретного времени равна
0.5.
.
Из него видно, что постоянная составляющая
этой функции дискретного времени равна
0.5.
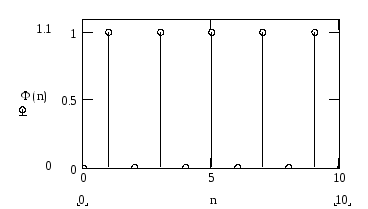
Рисунок
3.18 – Функция Ф(n) при![]() и
и
![]()
На
рисунке 3.19 приведена та же функция, но
при
![]() .
Из него видно, что постоянная составляющая
равна 0.707.
.
Из него видно, что постоянная составляющая
равна 0.707.
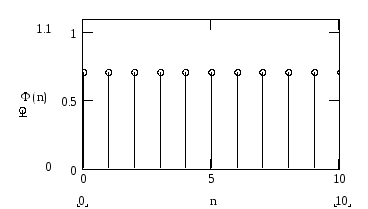
Рисунок
3.19 - Функция Ф(n) при![]() и
и
![]()
Таким
образом, при частоте несущей, равной
четверти частоты дискретизации, изменение
начального фазового сдвига несущей от
нуля до
![]() изменяет величину постоянной составляющей
функции
изменяет величину постоянной составляющей
функции![]() более чем на 40%.
более чем на 40%.
Следовательно, выходной сигнал детектора оказывается зависящим не только от амплитуды входного сигнала, но и от фазы несущей, что приводит к паразитной амплитудной модуляции сигнала.
Можно
показать, что при частоте несущей, равной
![]() ,
величина постоянной составляющей
,
величина постоянной составляющей![]() изменяется при изменении фазы несущей
не более чем на 8%.
изменяется при изменении фазы несущей
не более чем на 8%.
Поэтому амплитудный детектор-выпрямитель целесообразно использовать только при частотах несущей, которые существенно меньше частоты дискретизации.
3.7.2.Квадратурный амплитудный детектор с блоком извлечения
квадратного корня
На рисунке 3.20 приведена схема квадратурного амплитудного детектора с блоком извлечения квадратного корня

Рисунок 3.20 – Амплитудный детектор с блоком извлечения квадратного корня
В состав детектора входит 90-градусный фазорасщепитель (ФР), блок извлечения квадратного корня, два перемножителя и сумматор.
В случае идеального фазорасщепителя АМ сигналы на его выходах определяются соотношениями
![]() .
.
Из
схемы следует, что выходной сигнал
детектора равен
![]() и не зависит от частоты и фазы несущей,
что является достоинством детектора.
Недостаток детектора – наличие блока
извлечения квадратного корня, требующего
существенных программных затрат при
микропроцессорной реализации детектора.
и не зависит от частоты и фазы несущей,
что является достоинством детектора.
Недостаток детектора – наличие блока
извлечения квадратного корня, требующего
существенных программных затрат при
микропроцессорной реализации детектора.
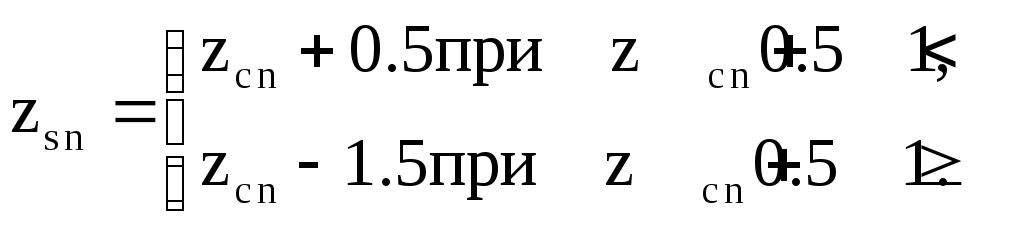
3.7.3. Синхронный амплитудный детектор с управляемым косинусно-синусным
генератором
Алгоритм функционирования синхронного амплитудного детектора с управляемым косинусно-синусным генераторомприведен на рисунке 3.21. В состав детектора входят 90-градусный фазорасщепитель (ФР) и управляемый косинусно-синусный генератор (УКСГ), выполненный на основе генератора пилообразных колебаний. Частота пилы задается переменной
![]() ,
(3.3)
,
(3.3)
где
![]() - константа, задающая частоту УКСГ,
равную частоте несущей входного АМ
сигнала,R– константа
управления.
- константа, задающая частоту УКСГ,
равную частоте несущей входного АМ
сигнала,R– константа
управления.
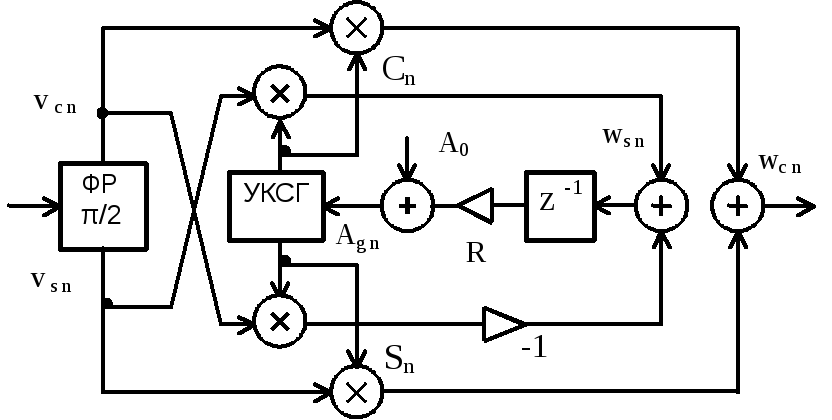
Рисунок 3.21 – Синхронный амплитудный детектор с управляемым КСГ
Текущий отсчет пилы на ее возрастающем участке определяется соотношением
![]() .
.
Отсчет пилы определяет значения отсчетов косинусной и синусной компонент УКСГ
![]() ,
,
где XГ– амплитуда генерируемых колебаний.
На выходах фазорасщепителя действуют две квадратурные компоненты детектируемого АМ сигнала
![]() ,
,
![]() .
.
Из рисунка 3.21 следует, что
![]() ,
(3.4)
,
(3.4)
![]()
![]() где
где
![]() .
–мгновенная разность фаз соответствующих
компонент входного сигнала и УКСГ
.
–мгновенная разность фаз соответствующих
компонент входного сигнала и УКСГ
Приращение мгновенной разности фаз за один отсчет равно
Согласно
(3.3)
![]() ,
поэтому
,
поэтому
 .
(3.5)
.
(3.5)
Согласно схеме рисунка 3.21
![]() .
.
Подставляя последнее соотношение в (3.5), получим
![]()
Последнее
соотношение выражает связь мгновенной
разности фаз с ее приращением и позволяет
определить значение
![]() в установившемся режиме. Зависимость
в установившемся режиме. Зависимость![]() от
от![]() приведена на рисунке 3.22.
приведена на рисунке 3.22.
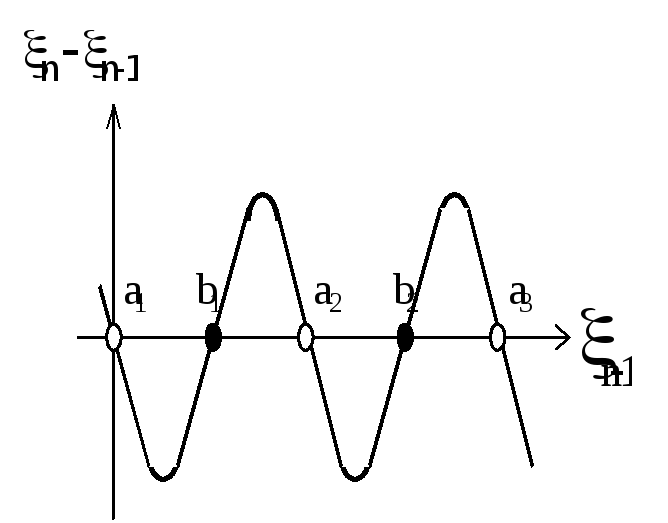
Рисунок 3.22 – Фазовый портрет кольца фазовой автоподстройки частоты
Синусоида
с амплитудой
![]() пересекает ось абсцисс в точках а1,
а2, а3...,b1,b2... Точки «а»
являются точками устойчивого равновесия,
т.к. любому увеличению
пересекает ось абсцисс в точках а1,
а2, а3...,b1,b2... Точки «а»
являются точками устойчивого равновесия,
т.к. любому увеличению![]() по сравнению со значением в этой точке
соответствует отрицательное значение
ее приращения
по сравнению со значением в этой точке
соответствует отрицательное значение
ее приращения![]() ,
а уменьшению
,
а уменьшению![]() –
положительное значение ее приращения.
В точках «b» всякому
увеличению
–
положительное значение ее приращения.
В точках «b» всякому
увеличению![]() соответствует
ее положительное приращение, приводящее
к дальнейшему возрастанию
соответствует
ее положительное приращение, приводящее
к дальнейшему возрастанию![]() до достижения ближайшей точки «а».
Аналогичная ситуация возникает при
уменьшении
до достижения ближайшей точки «а».
Аналогичная ситуация возникает при
уменьшении![]() по сравнению со значением в точке «b».
по сравнению со значением в точке «b».
Из
рисунка видно, что в точках «а»
![]() ,
а значения
,
а значения![]() равны 0, 2, 4и т.д., при которых
равны 0, 2, 4и т.д., при которых![]() .
Поэтому согласно (3.4) выходной сигнал
детектора равен
.
Поэтому согласно (3.4) выходной сигнал
детектора равен
![]() .
.
Последнее соотношение показывает, что выходной сигнал детектора прямо пропорционален амплитуде входного сигнала, что и требуется для амплитудного детектирования.
Достоинством данного детектора являются малые нелинейные искажения выходного сигнала.
3.7.4.Синхронный амплитудный детектор с узкополосным фильтром
для выделения несущей
На рисунке 3.23 представлен алгоритм функционирования синхронного амплитудного детектора с узкополосным фильтром для выделения несущей. В состав детектора входит узкополосный полосовой фильтр ПФ для выделения несущей АМ сигнала и два 90-градусных фазорасщепителя: широкополосный и узкополосный.
На выходах широкополосного фазорасщепителя действуют сигналы
![]()
где Xn–изменяющаяся во времени амплитуда входного сигнала, ω0–частота несущей.
На выходах узкополосного фазорасщепителя действуют сигналы
![]()
где X0– амплитуда несущей входного сигнала, φ – фазовый сдвиг между соответствующими компонентами выходных сигналов фазорасщепителей.
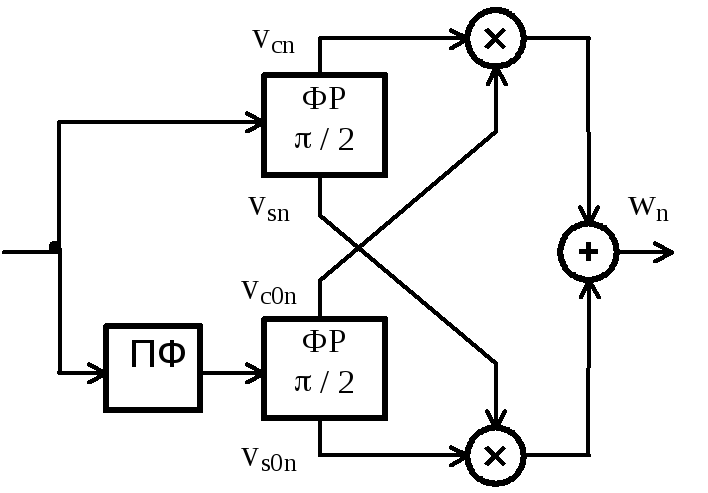
Рисунок 3.23 – Амплитудный детектор с узкополосным фильтром
для выделения несущей
Из рисунка следует, что выходной сигнал детектора равен
![]() (3.6)
(3.6)
Выходной сигнал детектора пропорционален амплитуде входного сигнала и принимает максимальное значение при φ = 0.
Соотношение (3.6) справедливо при использовании идеальных фазорасщепителей и идеального ПФ.
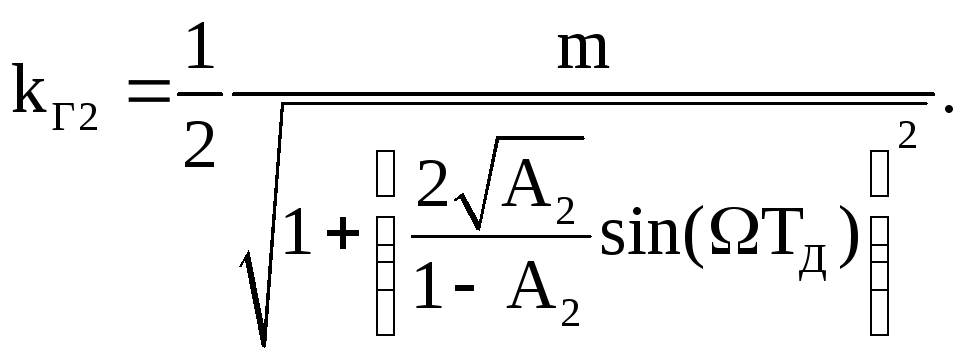
Если
на выходе ПФ наряду с несущей действуют
ослабленные боковые АМ сигнала, то
возникают нелинейные искажения выходного
сигнала детектора. При амплитуде входного
сигнала, изменяющейся по синусоидальному
закону
![]() гдеm– коэффициент глубины
модуляции, Ω – частота модуляции,
коэффициент второй гармоники равен
гдеm– коэффициент глубины
модуляции, Ω – частота модуляции,
коэффициент второй гармоники равен
![]()
где
![]() -
коэффициент передачи фильтра на частоте
несущей,
-
коэффициент передачи фильтра на частоте
несущей,![]() -
коэффициент передачи фильтра с
симметричной АЧХ на боковых частотах.
-
коэффициент передачи фильтра с
симметричной АЧХ на боковых частотах.
На
рисунке 3.24 представлен детальный
алгоритм функционирования детектора
для случая, когда частота несущей равна
четверти частоты дискретизации. В
качестве узкополосного фильтра
используется цифровой резонатор, АЧХ
которого определяется значением
константы А2. При масштабном
коэффициенте 1-A2коэффициент передачи резонатора на
частоте несущей равен единице. Для того
чтобы обеспечить значение![]() ,
сигнал на вход резонатора поступает с
выхода косинусной компоненты
широкополосного фазорасщепителя. В
качестве узкополосного фазорасщепителя
используется один из элементов задержки
цифрового резонатора, поскольку на
частоте
,
сигнал на вход резонатора поступает с
выхода косинусной компоненты
широкополосного фазорасщепителя. В
качестве узкополосного фазорасщепителя
используется один из элементов задержки
цифрового резонатора, поскольку на
частоте![]() он вносит фазовый сдвиг
он вносит фазовый сдвиг![]() .
.
Коэффициент второй гармоники выходного сигнала при использовании цифрового резонатора, настроенного на четверть частоты дискретизации, равен
Из последнего соотношения видно, что чем ближе значение A2к единице и чем выше частота модуляции, тем меньше нелинейные искажения выходного сигнала детектора.
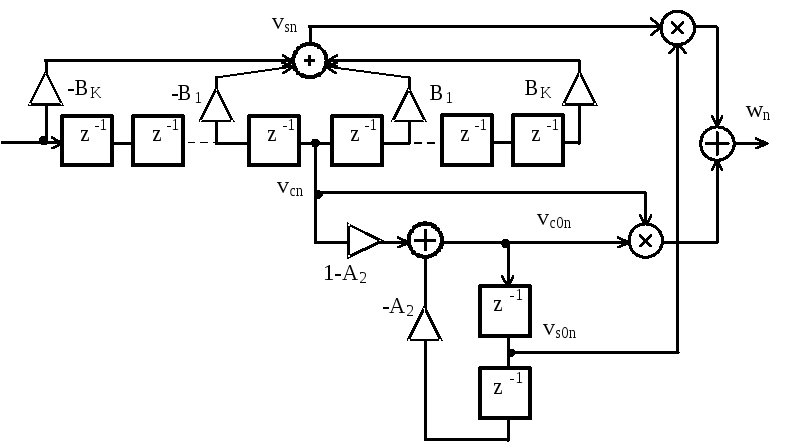
Рисунок 3.24 – Амплитудный детектор с узкополосным резонатором
для
выделения несущей (![]() )
)
3.8. Фазовые детекторы
3.8.1.Фазовый детектор с выходным ФНЧ
Фазовый детектор предназначен для формирования выходного сигнала, зависящего от разности фаз входного сигнала и опорного колебания.
На рисунке 3.25 показан фазовый детектор, содержащий перемножитель, опорный генератор синусоидальных колебаний ОГ и ФНЧ.