

Расчет пути на прочность
.pdfСложные колебания кузова принято разделять на возвратно-посту- пательные: подпрыгивание (вдоль вертикальной оси); подергивание (вдоль продольной оси); относ (вдоль поперечной оси) и вращательные: виляние (вокруг вертикальной оси); боковая качка (вокруг продольной оси); галопирование (вокруг поперечной оси).
Кроме того, путь и колеса подвижного состава имеют ряд несовершенств, каждое из которых вызывает добавочные силы инерции [1].
Несовершенства (неровности) на пути:
а) явные или геометрические за счет отклонений в отметках продольного профиля пути и микронеровностей на поверхности катания головки рельсов;
б) неявные (потайные) или силовые за счет неплотного прилегания элементов верхнего строения пути друг к другу и выборки люфтов под нагрузкой.
Несоврешенства колес:
а) несовпадение центра тяжести колеса с центром вращения (дисбаланс);
б) овальность колес; в) неравномерность износа колеса в поперечном сечении.
Все неровности можно разделить на два характерных вида: изолированные (их влияние на величину сил инерции заканчиваются до следующей неровности); непрерывные (непосредственно примыкают друг
кдругу) [1].
Висследовательских целях используется методика динамического расчета взаимодействия пути и подвижного состава М.Ф. Вериго, А.Я. Когана [15].
3.2. Переменные силы, действующие на путь
Вертикальные силы от колес к рельсам приложены статически. Но величина сил определяется с учетом динамики. Рассмотрим определение дополнительных инерционных сил, связанных с колебаниями кузова и необрессоренных масс подвижного состава при наличии несовершенств пути и колес.
Силы, связанные с колебаниями обрессоренных масс экипажа Рр.
Расчетная модель представлена на рис. 3.1 и имеет следующие обозначения:
Мк – масса кузова, приведенная к колесу;
Z – сжатие рессор при движении экипажа по неровности на пути;
Жр – жесткость рессорного подвешивания, приведенная к колесу,
Жр (0,5 2,0) 103 кН/м.
21

Z |
Мк |
|



 Жр
Жр
ΣТ
Рис. 3.1. Расчетная модель колебаний обрессоренных масс подвижного состава
В этом случае дифференциальное уравнение колебаний кузова имеет вид
Ж |
|
Z М |
d2 |
Z |
0 . |
(3.1) |
|
|
t2 |
||||
|
р |
к d |
|
|
||
Данное дифференциальное уравнение колебания груза на рессоре в явном виде
d2 |
Z |
|
Жр |
Z 0 . |
(3.2) |
d |
t2 |
|
Мк |
||
|
|
|
В уравнение (3.2) пришлось в рессоры добавить силы трения ( T) – сухие (псевдо) и вязкие (квази), иначе при критической скорости движе-
ния |
Vк |
могут возникнуть резонансные явления. Если рельсы 12,5 м – |
||||
V |
70 |
80 км/ч, при 25 м – |
V 140 160 км/ч; |
Жр |
2 |
– квадрат цик- |
|
|
|||||
к |
|
|
к |
Мк |
|
|
|
|
|
|
|
|
|
лической частоты собственных колебаний груза на рессорах. Циклич-
ность – за 2 секунд; 2 – частота, Гц.
На основании результатов больших натурных испытаний принято определять максимальную силу инерции от колебаний кузова на рессорах как
Рр Z Жр . |
(3.3) |
Значения Z принимают по материалам испытаний по следующей зависимости
Z a b V2 , |
(3.4) |
где a, b – эмпирические коэффициенты, установленные для различных подвижных единиц [2, 6].
Среднее значение Pрср 0,75Рр .
22

Среднее квадратическое отклонение данной силы Sр характеризует
разброс данных относительно среднего значения и определяется следующим образом: значение силы Pрi по формуле (3.3) для различных
величин Zi . Рассчитывается среднее арифмитическое значение силы
Pр ср . |
Далее вычисляется |
отклонение |
каждой |
величины силы Pрi от |
||||||||||||||||||
среднего значения |
Pр ср . |
Полученная разность возводится в квадрат. |
||||||||||||||||||||
Среднее квадратическое отклонение Sр определяется по формуле (3.5). |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Рр1 |
|
Z1 |
|
Sр1 |
Pp1 |
Ppср |
|
|
Sр12 |
(Pp1 |
|
Ppср )2 |
||||||||||
Рр |
2 |
|
Z2 |
|
Sр2 |
Pp2 |
Ppср |
|
|
Sр |
2 |
|
(Pp |
2 |
|
|
Pp |
)2 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
ср |
|||
Рр |
3 |
|
Z3 |
|
Sр3 |
Pp3 |
Ppср |
|
|
Sр |
2 |
|
(Pp |
3 |
|
|
Pp |
)2 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
ср |
|||
… |
|
|
… |
|
… |
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
|
|
|
Рр |
n |
|
Zn |
|
Sрn |
Ppn |
Ppср |
|
|
Sр |
2 |
|
(Pp |
|
|
|
Pp |
)2 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
n |
|
n |
|
|
|
ср |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
i n |
|
|
|
|
|
|
|
|
|
|
|
S |
|
2 |
|
|
|
|
|
|
|
S |
0, так как |
P |
|
P |
|
|
S |
|
|
pi |
(3.5) |
|||||||||
р ср |
|
рi |
|
|
|
pi |
|
ср |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
i 1 |
|
|
|
|
|
|
|
|
р |
|
|
n |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
ВНИИЖТ сопоставил Sр и Рр |
и установил, что Sp |
|
0,08 Pp . |
||||||||||||||||||
|
Силы, связанные с колебаниями необрессоренных масс (колес- |
|||||||||||||||||||||
ная пара, буксовый узел, рессора) Рнп. |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
В этом случае определяются дополнительные силы инерции, возник- |
|||||||||||||||||||||
новение которых связано с нали- |
|
|
|
|
|
Мк |
|
|
|
|
|
|
|
|||||||||
чием неровности на пути. Неров- |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
η |
|
|
|||||||||||
ности железнодорожного пути – |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
это искажения в профиле (гео- |
|
|
|
|
|
|
|
|
|
|
|
|
|
траектория |
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
метрические неровности |
– ви- |
|
|
mп |
|
|
|
|
|
|
|
|
движения |
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||
димые) и динамические неровно- |
|
|
|
|
|
y |
|
колеса |
||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||
сти за счет просадки подрельсо- |
Рис. 3.2. Схема неровностей на пути |
|
вого основания у (рис. 3.2). |
||
|
Общая просадка колеса в зоне геометрической неровности равна
( у).
Вертикальная скорость колеса на этом перемещении:
|
|
d( |
у) |
, |
(3.6) |
|
|
|
dt |
|
|||
|
|
|
|
|
|
|
а вертикальное ускорение |
d2( |
у) |
. |
(3.7) |
||
|
dt2 |
|
||||
|
|
|
|
|
|
|
23

В общем случае любая сила инерции равна произведению массы на ускорение, действующее на эту массу.
Рассмотрим взаимодействие колеса и пути в самом упрощенном виде. Уравнение равновесия можно записать в следующем виде:
R |
J T Q 0 . |
(3.8) |
где R – реакция рельса; J |
– силы инерции; |
T – силы трения; Q – |
внешние силы. |
|
|
Сила упругого отпора (реактивная сила) рельса может быть опреде-
лена по формуле |
|
|
|
R |
у |
, |
(3.9) |
|
|||
|
у1 |
|
|
где у – просадка рельса под колесом (динамический прогиб); у1 – величина просадки под единичной силой.
В статике
y |
P K |
1 y |
1 K |
; |
|
1 |
|
|
2 U |
Ж |
|
, |
(3.10) |
|
|
|
|
|
|
|
|
|
|
||||||
|
2 U |
1 |
2 U |
y1 |
|
K |
|
п |
|
|||||
|
|
|
|
|
|
|
||||||||
где Жп – жесткость пути, приведенная к |
контакту |
колеса |
и рельса, |
|||||||||||
Жп (0,5 2,0) 105 кН/м; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
у Жп . |
|
|
|
|
|
|
|
|
(3.11) |
||
Если измерим прогиб y под неизвестной силой Px , то можем найти и
y
силу Px y1 .
Силы инерции для системы «колесо–путь» определяются по выражению
J M |
d2( |
y) |
m |
d2y |
, |
(3.12) |
dt2 |
|
dt2 |
||||
к |
|
п |
|
|
||
где mп – фиктивная масса колеблющегося пути, |
приведенная к точке. |
|||||
Экспериментально установлено, что она равна примерно 2–4-метровому куску рельса [1].
Суммарные силы трения можно получить по выражению
T r |
r y |
r |
dy |
r |
d2y |
r |
d3y |
... , |
(3.13) |
|
|
|
|||||||
0 |
1 |
2 dt |
3 dt2 |
4 dt3 |
|
|
|||
24

где r0 – параметр сил трения, независящих от величины перемещения
(по боковым поверхностям шпалы, между костылями и подошвой рельса); r1 – параметр сил трения, зависящих от величины перемещения
рельса (силы трения в балласте); r2 – параметр сил трения, зависящих
от скорости перемещения нагрузки (силы вязкого трения).
Параметры сил трения мало изучены и в практических расчетах не учитываются.
Воздействия внешних сил Q может и не быть. С учетом вышеизложенного в общем виде запишем следующее дифференциальное уравнение
|
y |
M |
d2( |
y) |
m |
d2y |
f(t) 0 . |
(3.14) |
|
|
|
|
|
||||
|
y1 |
к |
dt2 |
|
п dt2 |
|
|
|
Выполним преобразование и получим |
|
|
||||||
|
|
|
|
y |
|
(M |
m ) |
d2y |
|
M |
|
d2 |
f(t) 0; |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
y1 |
к |
п |
dt2 |
|
к |
|
dt2 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f1(t) |
|
|
|
||
|
|
|
|
|
d2y |
|
|
1 |
|
|
y |
1 |
|
f1(t), |
(3.15) |
|||||
|
|
|
|
|
dt2 |
|
y1(Mк |
mп ) |
Mк |
mп |
||||||||||
где |
1 |
|
2 |
|
– квадрат циклической частоты собственных коле- |
|||||||||||||||
|
|
|||||||||||||||||||
y1(Mк |
mп ) |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
баний системы «колесо–путь».
Тогда основное дифференциальное уравнение современного динамического расчета пути на прочность запишется в следующем виде
d2y |
2 |
y |
1 |
f (t) , |
(3.16) |
|
|
|
|||
dt2 |
|
|
Mк mп |
1 |
|
внешние силы
где 2 – квадрат циклической частоты собственных колебаний системы «колесо–путь»,
2 |
|
1 |
|
|
|
2 U g |
, |
(3.17) |
|
|
|
K |
qк |
|
|
K q |
|||
|
|
|
|
|
|
|
к |
|
|
|
|
2 U |
g |
|
|
||||
|
|
|
|
|
|
|
|||
g – ускорение силы тяжести; qк – необрессоренный вес, приходящийся на колесо.
25

Период собственных колебаний системы «колесо–путь» при известной частоте определяется по формуле
T |
2 |
. |
(3.18) |
|
Профессор С.П. Тимошенко (1909 г.) исследовал три вида неровности на пути:
треугольную; параболическую; косинусоидальную.
Было установлено, что наиболее неблагоприятной формой неровности на пути при определении дополнительного прогиба рельса у и дополнительной силы инерции является косинусоидальная.
Данная неровность описывается уравнением
|
a |
(1 cos |
2 |
|
x), |
(3.19) |
2 |
|
|
||||
|
|
н |
|
|||
|
|
|
|
|
||
где а – наибольшая ордината (амплитуда) неровности; |
н – длина не- |
|||||
ровности; х – текущее значение неровности, x V t . |
|
|||||
Вторая производная от уравнения (3.19) была подставлена в правую
часть уравнения (3.16) ( |
d2 |
|
– внешняя сила при наличии неровности). |
||||||||||||||||||||
dt2 |
|
||||||||||||||||||||||
В результате получено следующее решение уравнения |
|
|
|
|
|
||||||||||||||||||
y |
a |
|
|
Mк |
|
|
|
|
1 |
|
|
cos |
2 |
t |
cos |
2 |
t |
, |
|
(3.20) |
|||
2 Мк |
|
mп |
|
|
Т0 |
|
|
2 |
|
T0 |
T |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
Т |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где T – время прохождения колесом неровности, T |
|
|
н |
; T |
– период |
||||||||||||||||||
|
|
|
|||||||||||||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
собственных колебаний [формула (3.18)].
После вычисления дополнительного прогиба рельса y, вызванного неровностью (t), была определена сила инерции [6, 16]
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
|
|
|
|
|
|
|
||
R Pнп |
|
|
|
i |
|
|
|
qк V , |
(3.21) |
||||
|
|
|
|
|
|
|
|||||||
|
|
|
K |
||||||||||
2g |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
где i – уклон динамической неровности, i |
|
|
2a |
. |
|
||||||||
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
н |
|
||||
26

После преобразования и дополнительных исследований для пути с железобетонными шпалами была получена расчетная формула
|
|
8 |
|
U |
|
|
|
||
P |
0,8 10 |
P |
q V , |
(3.22) |
|||||
|
|
||||||||
|
|
|
|||||||
нп |
|
1 |
ср K |
к |
|
||||
где – коэффициент, учитывающий влияние типа рельсов на образова-
ние динамической неровности на пути ( 1 – для Р50; |
0,87 – для |
|
Р65; |
0,82 – для Р75); – коэффициент, учитывающий влияние рода |
|
балласта на образование динамической неровности на пути ( 1 – для щебня; 1,1 – для гравия; 1,5 – для песка); – расстояние между осями шпал, см; Рср – средняя со стороны колеса нагрузка, действующая на путь; V – скорость движения, км/ч; α1 – коэффициент, учитывающий влияние колеблющейся массы пути на образование динамической неровности на пути ( 1 0,931 – для железобетонных шпал; 1 1,000 – для деревянных шпал);  – коэффициент, учитывающий влияние жест-
– коэффициент, учитывающий влияние жест-
кости пути на величину уклона динамической неровности ( |
0,322 – |
||||||
для железобетонных шпал; |
1 – для деревянных шпал). |
|
|||||
Среднее квадратическое отклонение данной силы: |
|
||||||
|
|
|
|
|
|
|
|
|
|
P |
|
Pср 2 |
|
|
|
|
|
нп |
|
нп |
|
|
|
Sнп |
i |
|
|
, Sнп 0,707 Рнп. |
(3.23) |
||
|
N |
|
|||||
|
|
|
|
|
|
|
|
Силы инерции, связанные с наличием изолированных неровностей на колесах Ринк .
При движении колеса с изолированной неплавной неровностью на поверхности катания (ползун, выбоина) получается удар. В расчетах пути на прочность рассматривают случаи, когда колесо прокатывается по рельсу своей изолированной неровностью без отрыва, т.е. безударное взаимодействие.
а
а |
траектория центра |
|
|
|
тяжести колеса |
Рис. 3.3. Схема колеса с изолированной неровностью: а – ползун (выбоина)
Согласно ПТЭ дополнительная глубина неровности допускается для колес с подшипниками скольжения – 2 мм; с подшипниками качения – 1,0 мм. В соответствии с выполненными исследованиями получена следующая расчетная формула [6, 16]:
27
Р |
y |
|
а |
|
2U |
, |
(3.24) |
|
|
|
|
|
|||||
|
0 К |
|||||||
инк |
|
max |
1 |
|
|
|||
где ymax – максимальный дополнительный прогиб рельса при прохождении колесом косинусоидальной неровности, отнесенный к единице
глубины неровности, определяется по отношению |
T0 |
, где T |
– период |
||||||||||||||||||
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
вынужденных колебаний колеса при прохождении им неровности; T – |
|||||||||||||||||||||
период собственных колебаний системы «колесо–путь». |
|
|
|
||||||||||||||||||
Расчетные значения T0 |
и T |
|
определяются по формулам: |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
T |
0,036 |
|
0 i |
и T |
|
5,56 |
|
Kqк |
; |
|
|
(3.25) |
|||||
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
0 |
|
|
|
V |
|
|
|
|
gU |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
0 1 |
|
20 см и |
0 |
2 |
d; |
g 981см/ c2 . |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
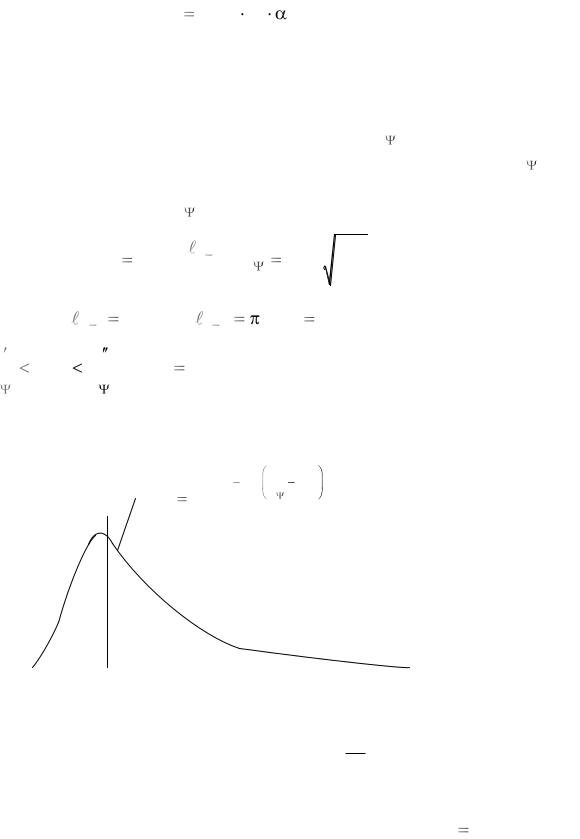
При |
T0 |
0,71 |
|
T0 |
, |
y |
|
1,47 ; при других значениях y |
max |
опреде- |
|||||||||||
|
|
|
|||||||||||||||||||
|
T |
|
|
T |
max |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ляется по графику профессора С.П. Тимошенко (рис. 3.4) как наибольшая величина в интервале значений.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T0 |
|
|
|
1,37 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
1,25 |
0,71 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|||||||
ymax |
|
|
|
|
ymax |
1,47e |
|
|
|
|
|
|
|
при Т0/ТΨ>0,71 |
||||||||||||
1,4 |
|
|
|
1,47 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1,0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,71 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т0/ТΨ |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
0 |
0,2 |
0,6 |
1,0 |
1,4 |
1,8 |
2,2 |
2,6 |
3,0 |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||
Рис. 3.4. Кривая дополнительного прогиба рельса ymax в зависимости от соотношения T0i
T
Другой способ определения ymax сводится к нахождению критической скорости Vкр , при превышении над которой заданной Vi ymax 1,47 . Кри-
тическая скорость определяется по зависимости
28

|
|
|
|
|
|
|
|
|
|
V |
0,182 |
U g |
. |
|
|
|
|
(3.26) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
кр |
|
K qк |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Если Vкр Vi , |
то ymax определяется по |
графику при |
|
значении |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,129 |
|
U g |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
T0 |
K qк |
T0 |
|
|
|
||||||||||||||
|
|
|
|
или при |
|
|
|
0,71 – по аппроксимированному выраже- |
||||||||||||
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
T |
|||||||||||||
|
T |
|
V |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T0 |
1,37 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1,25 |
0,71 |
T |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|||||
нию кривой указанного графика ymax 1,47e |
|
, а при |
|
0 |
0,71 – |
|||||||||||||||
|
T |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
по линейной зависимости, заменяющей криволинейное очертание этого участка в графике (е – основание натуральных логарифмов).
В формуле (3.24) a1 – расчетная глубина изолированной неровности на колесе, принимается величиной 2/3 от допускаемого значения по ПТЭ
(a1 0,065 см – при подшипниках качения и a1 0,133 см – при подшип- |
|
никах скольжения); |
0 – коэффициент, учитывающий влияние колеб- |
лющейся массы пути ( |
0 0,433 – при деревянных шпалах, 0 0,403 – |
при железобетонных шпалах). |
|
Среднее квадратическое отклонение данной инерционной силы рав-
но следующей величине |
|
|
|
|
|
|
|
|
S |
0,25Р |
0,5y |
|
а |
|
U |
. |
(3.27) |
|
|
|
||||||
инк |
инк |
|
max |
1 |
0 K |
|
||
Силы инерции, связанные с наличием непрерывной неровности на колесе Рннк .
Непрерывные неровности на колесе появляются за счет несовпадения центра тяжести колеса с центром тяжести оси и центром вращения (рис. 3.5, а), за счет овальности колес (рис. 3.5, б) и за счет неравномерности износа колес в поперечном сечении и перехода круга качения с диаметра Д1 на Д2 (рис. 3.5, в).
По уточненным данным профессора М.Ф. Вериго [6] дополнительную силу инерции за счет непрерывной неровности на колесе можно определить по формуле
|
|
|
|
U V2 |
|
|
|
|
|
|
0,231 |
о |
q |
|
|
|
|||
Рннк |
|
|
|
к |
|
, |
(3.28) |
||
|
|
|
|
|
|
|
|||
d2 K U |
|
3,26 K2 |
qк |
||||||
|
|
|
|
|
|||||
где V – скорость движения, км/ч; d – диаметр колеса, см.
29

а |
центр круга |
б |
|
|
|
|
катания |
Д1 ≠ Д2 |
|
центр оси |
Д2 |
в
Д2 |
|
|
|
|
|
|
|
|
|
|
|
Д1 |
||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.5. Непрерывные неровности на колесе
Седнее квадратическое отклонение данной силы
Sннк 0,225 Рннк . |
(3.29) |
3.3. Выбор расчетной нагрузки
Для расчета необходимо определить вероятное значение суммарной вертикальной силы.
Вероятностная композиция вертикальных сил записывается в следующем виде
Ррасч Рст* Рр* Рнп* Ринк* Рннк . |
(3.30) |
|
Ni |
|
Рmin |
Р |
Рmax |
Рис. 3.6. Гистограмма распределения Рi
Расчетную силу надо составить с заданной степенью вероятности. Пусть измерено N раз значение вертикальной силы в сечении пути. Построим гистограмму плотности частостей (вероятностей) (рис. 3.6). Весь диапазон сил от
до Рmax разделим на равные интервалы (разряды) величиной Р (шаг интервала).
30