

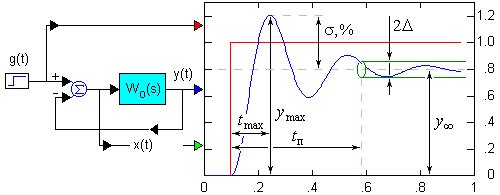
44 Оценка запаса устойчивости и быстродействия по переходной характеристике
![]() Запас
устойчивости САР оценивают по величине
перерегулирования:
Запас
устойчивости САР оценивают по величине
перерегулирования:
= (ymax - y) / y100, [%]
|
Варианты |
0 % |
10..30 % |
50..70 % |
|
Применяемость |
редко |
часто |
избегают |
|
Запас по фазе |
90° |
60°..30° |
30°..10° |
|
Число колебаний |
0 |
1, 2 |
3, 4, ... |
![]() Быстродействие
САР оценивают по времени окончания
переходного процессаtп,
при заданной допустимой ошибке (трубке):
Быстродействие
САР оценивают по времени окончания
переходного процессаtп,
при заданной допустимой ошибке (трубке):
5; 2,5; 1,5; 1; 0,5; ... [%] от y , - установлено ГОСТ-ами.
![]() Частоту
единичного усиления разомкнутой системыср
можно оценить по частоте колебаний
переходной функции.
Частоту
единичного усиления разомкнутой системыср
можно оценить по частоте колебаний
переходной функции.
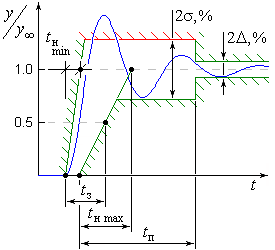
Примечание: При синтезе САР используют область допустимых отклонений регулируемой величины.
Время нарастания ограничено:
tн min - допустимым ускорением координат и предельными колебательными режимами;
tн max - требуемым быстродействием.
На рис. tз - максимальное допустимое время запаздывания (распространения) сигнала.
Корневые методы оценки качества
Поскольку корни ПФ однозначно определяют вид переходного процесса, их можно использовать для оценки: 1) запаса устойчивости и, 2) быстродействия.
Примечание: Обычно обходятся исследованием только полюсов ПФ (s), т.е. корней характеристического уравнения 1+W(s)=0.
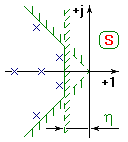
![]() Система
будет склонна к колебаниям, если имеются
комплексные корни вида -±j.
Оценить эту склонность можно используя
показатель запаса устойчивости -
колебательность:
Система
будет склонна к колебаниям, если имеются
комплексные корни вида -±j.
Оценить эту склонность можно используя
показатель запаса устойчивости -
колебательность:
= ,
где: - коэффициент затухания; - круговая частота колебаний.
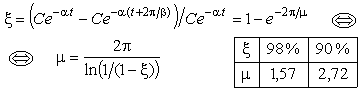
Колебательность определяет другой показатель - затухание амплитуды колебаний x(t) = Ce - t sin за период:
![]()
 .
.
Задание определенной колебательности заставляет ограничить область расположения корней.
Колебательность системы можно найти используя подстановку s = z e j(90-), что соответствует повороту осей плоскости корней на угол (90-). Далее, используя любой критей устойчивости, подбирают угол , при котором система будет находиться на границе устойчивости. И тогда: = tg = .
![]() Для
оценки быстродействия может использоваться
понятие степени быстродействия
- это абсолютное значение вещественной
части ближайшего к мнимой оси корня.
Т.е. если этот корень -±j,
то
равна коэффициенту затухания .
Для
оценки быстродействия может использоваться
понятие степени быстродействия
- это абсолютное значение вещественной
части ближайшего к мнимой оси корня.
Т.е. если этот корень -±j,
то
равна коэффициенту затухания .
И действительно, составляющая в переходном процессе x(t) = Ce -tsin(t+), затухает тем медленней, чем меньше . Если в конце переходного процесса амплитуда колебаний равна C, то веремя переходного процесса:
![]() .
.
Задание определенной степени быстродействия заставляет ограничить область расположения корней.
Степень быстродействия можно найти используя постановку s = z - var, что соответствует смещению корней на величину var. Далее, используя любой критерий устойчивости, подбирают значение var, при котором система будет на границе устойчивости. И тогда: var.
Понятие о среднегеометрическом корне 0. Мажоранта и миноранта переходной функции
Пусть имеем характеристическое уравнение:
a0 s n + a1 s n-1 + ... + an-1 s + an = 0 .
Приведем его к нормированному
виду (разделим на an
и выполним подстановку![]() ):
):
q n + a1/an (0 q) n-1 + ... + ak/an (0 q) n-k +...+ 1 = 0 ,
где: ![]() - среднегеометрический корень.
- среднегеометрический корень.
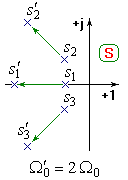
Для статических САР an = 1 + K, для астатических an = K, a0 = T1 T2 ... Tn; следовательно увеличивая K можно увеличить 0. На основании теоремы подобия увеличение 0 вызовет пропорциональное радиальное смещение корней. Т.е. вид переходного процесса меняться не будет, но будет меняться его временной масштаб. Поэтому среднегеометрический корень 0 является мерой быстродействия.
Для приведенного уравнения время будет безразмерным = 0 t, переходная функция h(t) в случае кратных вещественных корней или одной пары комплексных будет ограничена минорантой и мажорантой:
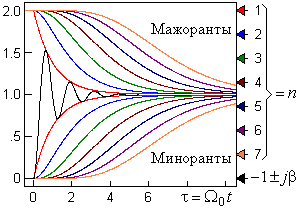
1-(, t) < h(t) < 1+, t) ,
где: , t) = e -t [1 + (t)1/1! + (t)2/2! + ... + (t)n-1/(n-1)! ] - разложение в ряд Тейлора огибающей той составляющей в пререходном процессе, корень которой ближе к оси "+j".
На рис. демонстрируется, что любой переходный процесс в любой системе будет затухать тем медленней, чем больше корней вблизи оси "+j".