

7. Общие указания к заданию на курсовое проектирование
По курсу «Электрический привод» выполняется курсовой проект, который базируется на материалах первой и второй частей курса.
Задание Электропривод механизма подъемной установки мостового крана
7.1. Общие сведения
Механизмы подъемной установки предназначены для подъема и опускания груза, оборудования и т.д. при наматывании или сматывания каната на барабан лебедки.
Кинематическая схема механизма подъема приведена на рис. 1.
Р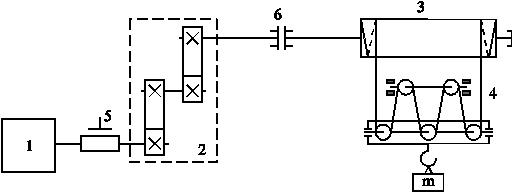 ис.
7.1. Кинематическая схема механизма
подъема
ис.
7.1. Кинематическая схема механизма
подъема
1-электродвигатель; 2-редуктор; 3-барабан, 4-полиспаст; 5-тормоз; 6-соединительная муфта.
Цикл работы механизма состоит из операций подъема, перемещения, опускания груза, затем подъема, перемещения и опускания захватного приспособления (без груза).
7.2. Электропривод механизма подъема
Для выполнения тахограммы движения на участке разгона используется многоступенчатый реостатный пуск с числом ступеней 5-6. В качестве электропривода преимущественное распространение получил асинхронный двигатель с фазным ротором, в некоторых случаях - двигатель постоянного тока.
При торможении в зависимости от величины и знака тормозного усилия используется двигательный режим при работе двигателя на реостатной характеристике или электродинамическое торможение с наложением электромеханического тормоза для окончательной остановки привода.
В вариантах задания заданы технические данные механизма подъема: грузоподъемность G1, кН; вес грузозахватного устройства G0, кН; диаметр барабана Dб, м; скорость подъема и опускания груза V, м/с; ускорение (замедление) при работе с грузом а1, м/с2; ускорение (замедление) при работе без груза а0, м/с2; кратность полиспаста k; передаточное число редуктора i, ПВ механизма, ; длительность цикла tц, с; КПД редуктора р; КПД полиспаста п; КПД барабана б; высота подъема Н, м.
7.3. Методические указания к расчету
Время пуска (торможения) двигателя с грузом
![]() , (7.1)
, (7.1)
Время пуска (торможения) двигателя без груза
![]() , (7.2)
, (7.2)
Средняя скорость передвижения груза (захватного приспособления), за время пуска и торможения
![]() , (7.3)
, (7.3)
Путь, пройденный грузом (захватным приспособлением) за время пуска и торможения
![]() , (7.4)
, (7.4)
Путь, приходящийся на движение груза (захватного приспособления) при установившейся скорости
![]() , (7.5)
, (7.5)
Время подъема груза (захватного приспособления) с установившейся скоростью
![]() , (7.6)
, (7.6)
Момент статической нагрузки при движении с грузом и без груза (для случаев поднятия и спуска)
![]() , (7.7)
, (7.7)
где G = Gг+G0 - вес груза и грузозахватного устройства при поднятии и опускании груза, кН;
G/ = G0 - вес грузозахватного устройства при поднятии и опускании крюка, к.Н;
ip - передаточное число редуктора;
in - кратность полиспаста;
n - КПД передачи.
По приведенным формулам определяют:
Мст1 – статический момент нагрузки при подъеме груза,
Мст2 - статический момент нагрузки при опускании груза,
Мст3 - статический момент нагрузки при подъеме грузозахватного устройства (без груза),
Мст4 - статический момент нагрузки при опускании грузозахватного устройства (без груза).
Предварительный выбор мощности двигателя, как правило, производится по статическому среднеквадратичному (эквивалентному) моменту
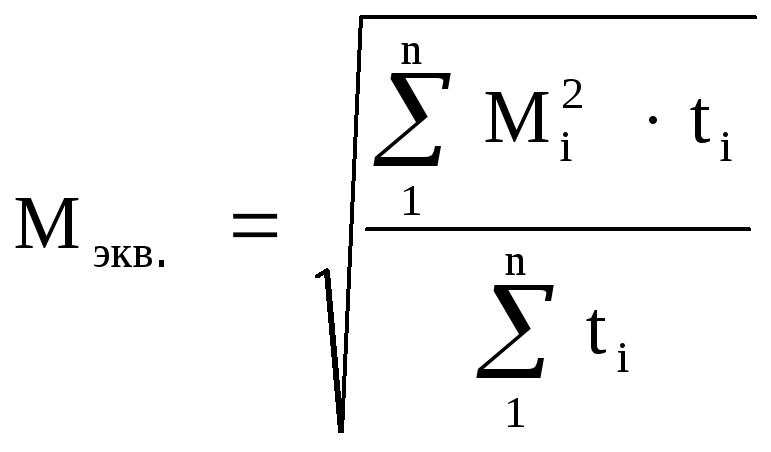 , (7.8)
, (7.8)
где Мi- значение момента при i-м участке;
ti - время работы на i-м участке, с.
![]() , (7.9)
, (7.9)
где kз= (1,1 - 1,5) - коэффициент запаса, учитывающий неизвестную на этапе предварительных расчетов динамическую составляющую нагрузки.
Действительная продолжительность включения
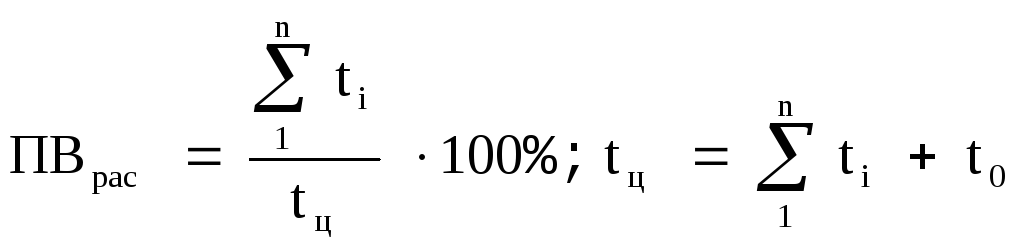 , (7.10)
, (7.10)
Требуемая номинальная скорость двигателя
![]() , (7.11)
, (7.11)
Эквивалентная расчетная мощность двигателя
![]() , (7.12)
, (7.12)
Пересчитанная на ближайшую стандартную продолжительность включения мощность
![]() , (7.13)
, (7.13)
Номинальная
мощность двигателя (PH)
определяется из условия
![]()
По рассчитанной скорости вращения и номинальной мощности с учетом принятой системы электропривода выбирается двигатель.
Следующим этапом расчета является проверка выбранного двигателя по условию нагрева и перегрузки. Для этого необходимо рассчитать и построить нагрузочную диаграмму привода.
Динамический момент зависит от момента инерции привода и его ускорения (α1, α 0)
![]() , 7.14)
, 7.14)
![]() , (7.15)
, (7.15)
где
![]()
угловое ускорение, 1/с2;
угловое ускорение, 1/с2;
![]() суммарный
приведенный момент инерции для
нагруженного ненагруженного механизма,
кг.м2;
суммарный
приведенный момент инерции для
нагруженного ненагруженного механизма,
кг.м2;
![]() момент
инерции вращающихся передач, соединительных
муфт и тормозных шкивов привода механизма
подъема.
момент
инерции вращающихся передач, соединительных
муфт и тормозных шкивов привода механизма
подъема.
Момент двигателя при пуске с грузом
![]() , (7.16)
, (7.16)
Момент двигателя при торможении с грузом
![]() , (7.17)
, (7.17)
Момент двигателя при пуске без груза
![]() , (7.18)
, (7.18)
Момент двигателя при торможении без груза
![]() , (7.19)
, (7.19)
Эквивалентный момент двигателя при ПВрасч,
 ,
,
(7.20)
где = 0,75 – для двигателей с самовентиляцией коэффициент, учитывающий ухудшение охлаждения двигателя при пуске и торможении.
Полученная величина эквивалентного момента приводится к ближайшей стандартной продолжительности включения. Двигатель проходит по нагреву, если МН Мэ.ст., где МН - номинальный момент предварительно выбранного двигателя.
Для того, чтобы не выбрать двигатель заведомо завышенной мощности, расхождение между эквивалентным и номинальным моментами не должно быть больше 15 - 20.
Пример оформления задания по курсовому проекту приведен в Приложении 1, варианты заданий на курсовой проект – вПриложении 2.
Приложение 1
Омский Государственный Технический Университет
Кафедра «Электрическая техника»
Пояснительная записка
К курсовому проекту по дисциплине
"Электрический привод"
"Проектирование электропривода подъемной установки мостового крана"
Выполнил:
студент группы
Проверил:
Задание
Вариант на разработку: 21+.
Грузоподъемность лебедки G1=350 кН.
Вес грузозахватного устройства G0=17,5 кН.
Диаметр барабана Dб=0,7 м.
Скорость подъема и опускания груза Vн=0,49 м/с.
Ускорение замедления при работе с грузом а1=0,56 м/с2.
Ускорение замедления при работе без груза а0=0,84 м/с.
Кратность полиспаста iп=7.
Передаточное число редуктора iр=5,0.
Длительность цикла tц=840 с.
КПД редуктора р=0,85.
КПД полиспаста п=0,99.
КПД барабана б=0,95.
Высота подъема Н=13 м.
Продолжительность включения механизма ПВ=63%.
К инематическая
схема механизма показана на рисунке.
инематическая
схема механизма показана на рисунке.
Рисунок 1. Кинематическая схема механизма подъема.
1 – электродвигатель; 2 – редуктор; 3 – барабан; 4 – полиспаст; 5 – тормоз; 6 – соединительная муфта.
Цикл работы механизма состоит из операций подъема, перемещения, опускания груза, затем подъема, перемещения и опускания захватного приспособления.