

3. Векторы скорости и ускорения точек тела. Чтобы найти выражения непосредственно для векторов и , проведем из произвольной точки о оси ав радиус-вектор точки м (рис. 17). Тогда и по формуле
![]() или
или
![]() .
.
Таким
образом, модуль векторного произведения
![]() равен модулю скорости точки М.
Направления векторов
равен модулю скорости точки М.
Направления векторов
![]() и
и
![]() тоже совпадают (оба они перпендикулярны
плоскости ОМВ) и размерности их
одинаковы. Следовательно,
тоже совпадают (оба они перпендикулярны
плоскости ОМВ) и размерности их
одинаковы. Следовательно,
![]() - формула Эйлера, т.е. вектор скорости
любой точки вращающегося тела равен
векторному произведению угловой скорости
тела на радиус-вектор этой точки.
- формула Эйлера, т.е. вектор скорости
любой точки вращающегося тела равен
векторному произведению угловой скорости
тела на радиус-вектор этой точки.
Пример
5. Маятник
![]() качается в вертикальной плоскости так,
что
качается в вертикальной плоскости так,
что
![]() .
Длина
.
Длина
![]() (рис. 19)
(рис. 19)
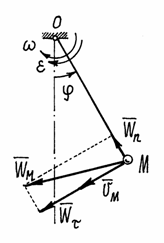
Рис.19
Маятник
вращается вокруг горизонтальной оси
![]() ,
перпендикулярной вертикальной плоскости.
Угловая скорость
,
перпендикулярной вертикальной плоскости.
Угловая скорость
![]() угловое ускорение
угловое ускорение
![]()
Например,
при
![]()
![]()
![]() (вращение по часовой стрелке);
(вращение по часовой стрелке);
![]() (угловое
ускорение направлено также по часовой
стрелке). Вращение в этом положении
ускоренное.
(угловое
ускорение направлено также по часовой
стрелке). Вращение в этом положении
ускоренное.
Скорость
точки
![]() :
:
![]()
![]() (определяется модуль скорости).
Направлен вектор скорости соответственно
направлению угловой скорости – в
сторону вращения.
(определяется модуль скорости).
Направлен вектор скорости соответственно
направлению угловой скорости – в
сторону вращения.
Нормальное
ускорение
![]()
![]()
касательное
ускорение
![]() .
(Определён опять модуль вектора ускорения.
Направлен вектор
.
(Определён опять модуль вектора ускорения.
Направлен вектор
![]() вниз, как указывает угловое ускорение).
вниз, как указывает угловое ускорение).
Величина
полного ускорения точки
![]()
45. Плоскопаралле́льное движе́ние
(плоское движение) — вид движения
абсолютно
твёрдого тела, при котором
траектории
всех точек
тела располагаются в плоскостях,
параллельных
заданной плоскости.Примером
плоскопараллельного движения по
отношению к вертикальной плоскости,
относительно которой тело движется в
параллельном направлении, является
качение колеса
по горизонтальной дороге
(см. рисунок).Пример плоскопараллельного
движения относительно плоскости чертежа
— качение колеса по горизонтальной
дороге. Все точки колеса движутся
параллельно плоскости рисунка.Здесь
плоскопараллельное движение в каждый
момент времени может быть представлено
в виде суммы двух движений — полюса
C, являющегося не чем иным, как центром
вращения колеса в связанной с ним системе
координат (в общем случае по любой
траектории на плоскости с точки зрения
неподвижного наблюдателя) и вращательного
движения остальных точек тела
вокруг этого центра.Вращение тела в
случае его плоско-параллельного движения
не является необходимым признаком
последнего.В таком случае вектор
абсолютной
скорости движения любой точки
будет определяться векторной суммой
переносной
скорости движения центра
вращения С, (одинаковой для расчёта
скорости любой точки колеса). И вектора
относительной
скорости выбранной точки,
зависящей от её положения, угловой
скорости вращения и расстояния от
центра.Если в данный момент для точки
контакта колеса с поверхностью (точки
А) эти скорости равны по модулю и
противоположны по направлению, имеет
место случай чистого (без проскальзывания)
качения, что показано на рисунке. Только
в этом случае cкорость точки М будет
в 2 раза больше скорости точки С и
направлена в ту же сторону.В общем случае
их соотношение может быть любым не
только по величине, но и по направлению.
46. Определение скоростей точек плоской фигуры
Было
отмечено, что движение плоской фигуры
можно рассматривать как слагающееся
из поступательного движения, при котором
все точки фигуры движутся со скоростью
![]() полюса А,
и из вращательного движения вокруг
этого полюса. Покажем, что скорость
любой точки М
фигуры
складывается геометрически из скоростей,
которые точка получает в каждом из этих
движений.
полюса А,
и из вращательного движения вокруг
этого полюса. Покажем, что скорость
любой точки М
фигуры
складывается геометрически из скоростей,
которые точка получает в каждом из этих
движений.
В
самом деле, положение любой точки М
фигуры определяется по отношению к осям
Оху
радиусом-вектором
![]() (рис.30), где
(рис.30), где
![]() -
радиус-вектор полюса А,
-
радиус-вектор полюса А,
![]() -
вектор, определяющий положение точки
М
относительно осей
-
вектор, определяющий положение точки
М
относительно осей
![]() ,
перемещающихся вместе с полюсом А
поступательно
(движение фигуры по отношению к этим
осям представляет собой вращение вокруг
полюса А).
Тогда
,
перемещающихся вместе с полюсом А
поступательно
(движение фигуры по отношению к этим
осям представляет собой вращение вокруг
полюса А).
Тогда
![]() .
.
В
полученном равенстве величина
![]() есть скорость полюса А;
величина же
есть скорость полюса А;
величина же
![]() равна скорости
равна скорости
![]() ,
которую точка М
получает при
,
которую точка М
получает при
![]() ,
т.е. относительно осей
,
т.е. относительно осей
![]() ,
или, иначе говоря, при вращении фигуры
вокруг полюса А.
Таким образом, из предыдущего равенства
действительно следует, что
,
или, иначе говоря, при вращении фигуры
вокруг полюса А.
Таким образом, из предыдущего равенства
действительно следует, что
![]() .
.
Скорость
![]() ,
которую точка М
получает при
вращении фигуры вокруг полюса А:
,
которую точка М
получает при
вращении фигуры вокруг полюса А:
![]()
![]() ,
,
где
![]() - угловая скорость фигуры.
- угловая скорость фигуры.
Таким
образом, скорость любой точки М
плоской фигуры геометрически складывается
из скорости какой-нибудь другой точки
А,
принятой за полюс, и скорости, которую
точка М
получает при вращении фигуры вокруг
этого полюса. Модуль и направление
скорости
![]() находятся построением соответствующего
параллелограмма (рис.31).
находятся построением соответствующего
параллелограмма (рис.31).
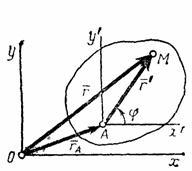
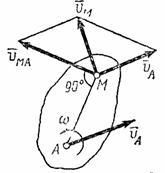
Рис.30 Рис.31