

13.3 Определение основных свойств объектов регулирования
Для определения свойств объекта регулирования используют следующие методы:
метод импульсных возмущений;
частотный метод;
статический метод;
метод прямоугольной волны;
метод переходных характеристик (метод кривых разгона)
Все методы основаны на изучении поведения объекта при возмущениях различного вида. Наиболее широко используют последний метод.
Все эти параметры позволяют судить о динамических свойствах объекта регулирования и, на их основании выбирается регулятор и параметры настройки для обеспечения высоких качественных показателей системы.
Автоматические регуляторы
Автоматическим регулятором называется комплекс устройств, предназначенных для измерения регулируемой величины, сравнения ее с заданной величиной и оказания регулирующего воздействия на технологический процесс для устранения выявления отклонения.
Автоматический регулятор состоит из следующих элементов:
чувствительного (измерительного) элемента – датчика;
управляющего устройства;
исполнительного механизма;
регулирующего органа.
Автоматические регуляторы классифицируются по следующим признакам:
По способу действия на регулирующий орган:
- прямого действия;
- косвенного действия;
По виду вспомогательной энергии (только для регуляторов косвенного действия):
- гидравлические;
- пневматические;
- электрические;
- комбинированные.
По роду действия (по виду управляющего воздействия на регулирующий орган):
- непрерывного действия;
- дискретного действия;
По виду регулируемой величины:
- температуры;
- давления;
- расхода;
- уровня и т.п.;
По конструкции:
- приборные - исследуемый сигнал поступает на прибор, регистрируется и преобразуется в сигнал управления, (автоматические потенциометры, логометры, мосты и т.п.)
- аппаратного типа, который только выдает управляющие сигналы - агрегатного типа, который сравнивает сигнал, поступающий от датчика и задающего устройства и формирует на их базе выходной сигнал.
Раздел VII. Классификация систем автоматики
Тема 14. Системы автоматики
14.1 Общая классификация систем автоматики
В зависимости от выполняемых функций системы автоматики делятся на:
контроля (САК);
блокировки (САБ);
защиты (САЗ);
сигнализации (САС);
регулирования (САР);
управления (САУ).
По виду применяемой энергии системы автоматики делятся на:
электрические;
механические;
пневматические и др.
По характеру воздействия одних устройств на другие системы автоматики делятся на:
непрерывные – непрерывному изменению значения входной величины системы соответствует непрерывное изменение значения выходной величины;
дискретные – непрерывному изменению значения входной величины хотя бы одного элемента, входящего в систему, соответствует прерывистое изменение выходной величины этого элемента.
14.2 Системы автоматического контроля (сак).
Служат для получения и обработки информации о значении контролируемого параметра и сравнения его с заданным.
Контроль может быть:
непрерывным или дискретным;
самостоятельным или входить в состав системы управоения технологическим процессом;
местным или дистанционным;
пассивным или активным;
единичного или множественного действия.
Рассмотрим работу типовой структурной схемы САК
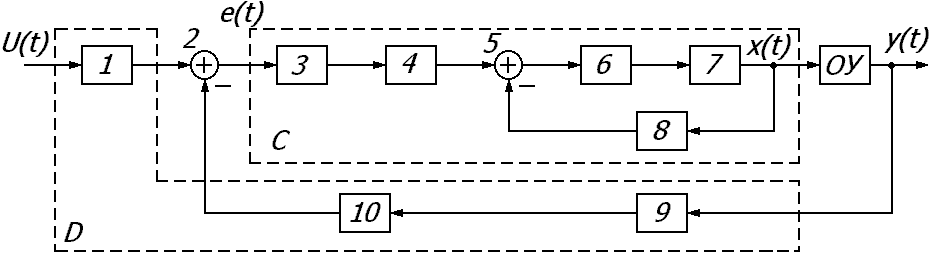
Рисунок 14.1 Структурной схемы САК
где U(t) – задающее воздействие (общий сигнал в систему),
x(t) – управляющее воздействие (то, что вырабатывает регулятор),
y(t) – управляемая величина,
e(t) – отклонение (ошибка) управляемой величины от задающего воздействия.
Структура САУ состоит из (см. рис.14.1):
1 Задающее устройство (ЗУ), которое преобразует входной сигнал U(t) в сигнал, удобный для дальнейшего использования;
2 сравнивающее устройство (СУ), вырабатывает сигнал ошибки (отклонения) как разность задающего сигнала и управляемой величины;
3 преобразующее устройство (ПрУ), преобразует сигнал ошибки в другую форму, удобную для дальнейшего использования, при этом не выполняются функции усиления и коррекции (пример: электрическаямеханическая);
4 и 8 корректирующие устройства, улучшают динамические свойства регулирования и повышают устойчивость. В зависимости от включения бывают параллельными или последовательными. 4 последовательная коррекция, 8 параллельная коррекция.
5 сравнивающее устройство (СУ) местной обратной связи;
6 усилительное устройство (УУ), усиливает мощность сигнала;
7 исполнительное устройство (ИУ), вырабатывает управляющее воздействие x(t) непосредственно на объект управления;
9 чувствительный элемент (ЧЭ), фиксирует (измеряет) управляемую величину y(t);
10 элемент главной обратной связи (Д), преобразует управляемую величину y(t) в вид, удобный для сравнения с задающим сигналом;
ОУ объект управления.
Блоки 1, 10, 9 образуют датчик (D), а блоки 3, 4, 5, 6, 7, 8 – сервомеханизм.
Тогда, с учетом укрупнений, получим (см.рис. 14.2):
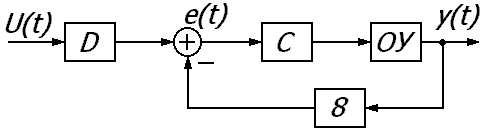
Рисунок 14.2. Укрупнённая структура САУ
Работа любой САК начинается с измерения контролируемого параметра объекта (О). Этот процесс выполняет датчик (D). Он не только измеряет контролируемую величину, но и преобразует эту величину в удобную для передачи на расстояние или для восприятия последующими устройствами схемы форму сигнала. Если этот сигнал слаб, его усиливают усилителем (6). Далее сигнал может быть послан по-разному.
Недостатком этой схемы является невозможность вмешиваться в ход протекания технологического процесса.