

10.2. Исполнительные двигатели с обычным и гладким беспазовым якорями. Бесконтактные двигатели Исполнительные двигатели с обычным якорем и электромагнитным возбуждением
Эти двигатели отличаются от обычных силовых двигателей постоянного тока тем, что имеют шихтованные из листовой стали не только магнитопроводы якоря, но и магнитопроводы спинки статора и полюсы, что обеспечивает повышение быстродействия при переходных процессах. Они менее насыщены (с целью повышения линейности основных характеристик), что приводит к увеличению их габаритных размеров по сравнению с силовыми двигателями тех же мощностей, а также имеют большее число секций якоря, а следовательно, и коллекторных пластин, что необходимо для улучшения коммутации особенно при переходных режимах, в которых постоянно работают исполнительные двигатели. В нашей стране выпускается несколько серий исполнительных двигателей постоянного тока с обычным якорем и электромагнитным возбуждением. Это двигатели серий СЛ (см. рис. 10.1), МИ, ПБС и др. Многие двигатели средней и большой мощностей выпускаются со встроенными тахогенераторами (МИ, ПБС).
Исполнительные двигатели с обычным якорем и возбуждением от постоянных магнитов
Эти двигатели отличаются от рассмотренных двигателей обычного использования только тем, что основной их магнитный поток создается не обмоткой возбуждения, а постоянными магнитами, которые располагаются на статоре и заменяют обычные полюсы с обмоткой возбуждения.
Преимущества двигателей с постоянными магнитами по сравнению с двигателями постоянного тока, имеющими обмотки возбуждения, можно сформулировать следующим образом:
отсутствие потерь мощности на возбуждение, что обусловливает более высокий КПД, достигающий даже у двигателей малых мощностей (в несколько ватт) 60...70%;
отсутствие источника питания для обмотки возбуждения;
практически полная независимость основного магнитного потока машины от изменений температуры и колебаний напряжения сети.
Эти преимущества двигателей с постоянными магнитами способствуют все более возрастающему их применению как в следящих системах, так и автоматизированных приводах. В последнее время в технике получают широкое применение не только двигатели с постоянными магнитами малых мощностей, но и двигатели средних и больших мощностей.
Отсутствие потерь мощности на возбуждение позволяет увеличить ток якоря и потери в его обмотке без увеличения температуры нагрева (а значит, без увеличения габаритных параметров якоря), что приводит к увеличению вращающего момента (М ≈ ФIя), развиваемого двигателем, а следовательно, и отдаваемой им мощности P = Мn. Именно поэтому такие двигатели иногда называют высокомоментными.
С целью уменьшения искрения под щетками — получения удовлетворительной коммутации при увеличенных токах якоря, что имеет место в переходных режимах (при пуске, остановке, реверсе), в которых, как правило, большую часть времени работают исполнительные и высокомоментные двигатели автоматических систем, обмотки якорей выполняют с большим числом Nc секций, а коллекторы — с большим числом NK коллекторных пластин (Nc = NK). Это позволяет уменьшить число витков в каждой из секций, а следовательно, и значения ЭДС (ек) коммутируемых секций, наводимых в них в процессе коммутации (ЭДС вращения eвр, ЭДС самоиндукции eL, ЭДС взаимоиндукции ет и ЭДС трансформации етр).
Стоимость двигателей с постоянными магнитами, несмотря на кажущуюся их простоту, часто не ниже, а даже выше стоимости двигателей с обмоткой возбуждения. Объясняется это высокой стоимостью и дефицитностью целого ряда материалов, идущих на изготовление постоянных магнитов (например, самария, кобальта), а также трудностью их механической обработки, поэтому длительное время двигатели с постоянными магнитами выпускались на небольшие мощности.
В последнее время получили широкое распространение недорогие ферритобариевые и другие магниты, обладающие высокой удельной энергией за счет большой коэрцитивной силы материалов. Это позволило проектировать и выпускать двигатели с постоянными магнитами большой номинальной мощности (на десятки киловатт). Двигатели некоторых серий большой мощности имеют встроенные тахогенераторы.
На рис. 10.2 представлена конструкция микродвигателя постоянного тока с постоянным магнитом серии ДПМ, получившего широкое распространение. Его недостатками являются нетехнологичность и сравнительно дорогой кольцевой постоянный магнит из сплава типа ЮНДК.
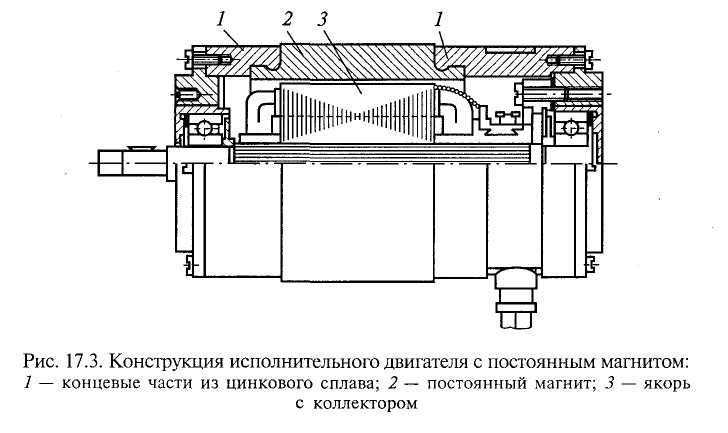
Рисунок 10.2. Конструкция исполнительного двигателя с постоянным магнитом:
1-концевые части из цинкового сплава; 2- постоянный магнит; 3- якорь с коллектором
В последние годы была разработана целая серия ДП микродвигателей постоянного тока исполнения Р09 с дешевыми феррито-бариевыми постоянными магнитами. По своим характеристикам такие двигатели весьма близки к двигателям серии ДПМ.