

Малоинерционные двигатели с обычной обмоткой якоря
Эти двигатели отличаются от малоинерционных двигателей с печатной обмоткой якоря лишь конструкцией обмотки. Они также выпускаются как с цилиндрическими, так и с дисковыми якорями.
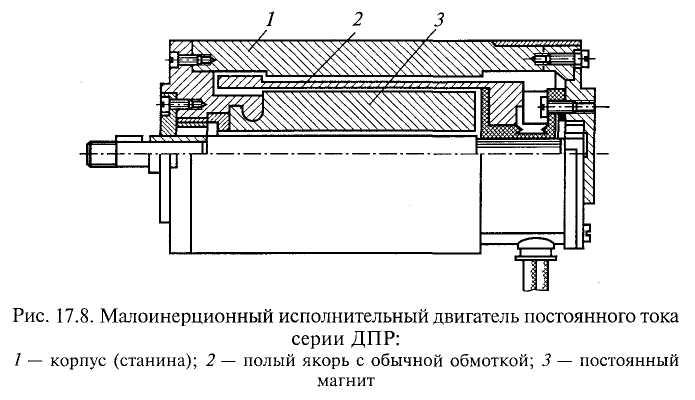
Рисунок 10.7. Малоинерционный исполнительный двигатель постоянного тока серии ДПР:
1-корпус( станина); 2- полый якорь с обычной обмоткой; 3- постоянный магнит
Обмотка якорей этих двигателей выполняется из обычного тонкого провода с эмалевой изоляцией, который в процессе изготовления якоря укладывается в виде секций на цилиндрический или плоский (дисковый) каркас, пропитывается термоактивным компаундом на основе эпоксидной смолы и после формовки и полимеризации компаунда превращается в монолитный цилиндр или диск, имеющий необходимую прочность. Концы секций обмотки якоря выводятся к пластинам коллектора. В отличие от якорей с печатными обмотками в этом случае число проводников обмотки якоря может быть значительно большим, что позволяет рассчитывать двигатели на более высокие напряжения и более низкие частоты вращения. Возбуждаются эти двигатели, как правило, постоянными магнитами.
Выпускается серия ДПР малоинерционных исполнительных двигателей с полыми цилиндрическими якорями, имеющими обычную обмотку (рис. 10.7). В двигателях этой серии магнит размещен внутри якоря. Это позволило значительно сократить потоки рассеяния магнита и лучше его использовать. Корпус двигателя одновременно служит и магнитопроводом. Серия ДПР охватывает диапазон мощностей от 0,12 до 37 Вт. КПД двигателей этой серии на 15... 25 % выше, чем у двигателей серии ДПМ, имеющих якорь обычной конструкции. Электромеханические постоянные времени двигателей серии ДПР от 15 до 20 мс, что в 2 — 2,5 раза меньше, чем у двигателей серии ДПМ.
Тема 11 Исполнительные двигатели переменного тока
11.1. Основные типы двигателей. Асинхронные микродвигатели
Самыми распространенными силовыми микродвигателями автоматики в настоящее время являются асинхронные двигатели. По своему устройству это двигатели с короткозамкнутым ротором, который чаще всего имеет обмотку, изготовленную в виде беличьей клетки. Реже ротор изготовляется массивным и полым из чугуна или стали, что делается либо для получения мягких механических характеристик, либо ради достижения особой механической прочности ротора, необходимой при высоких частотах вращения, либо с целью уменьшения акустического шума при работе двигателя. Асинхронные двигатели с фазовым ротором не выпускаются.
Классификация силовых асинхронных микродвигателей представлена на рис. 11.1.
В качестве силовых двигателей в схемах автоматики очень часто применяются трехфазные и однофазные асинхронные микродвигатели широкого применения, рассчитанные на работу от сети с частотой 50 Гц.
Так как механическая мощность асинхронного двигателя практически (при прочих равных условиях) прямо пропорциональна частоте питающего напряжения (Р ~ Мп ~ Мпс ~ M60f/p ~ f), а габаритные размеры определяются значением вращающего момента М, то в схемах автоматики очень часто применяют асинхронные двигатели, рассчитанные на работу от напряжений повышенной частоты f.
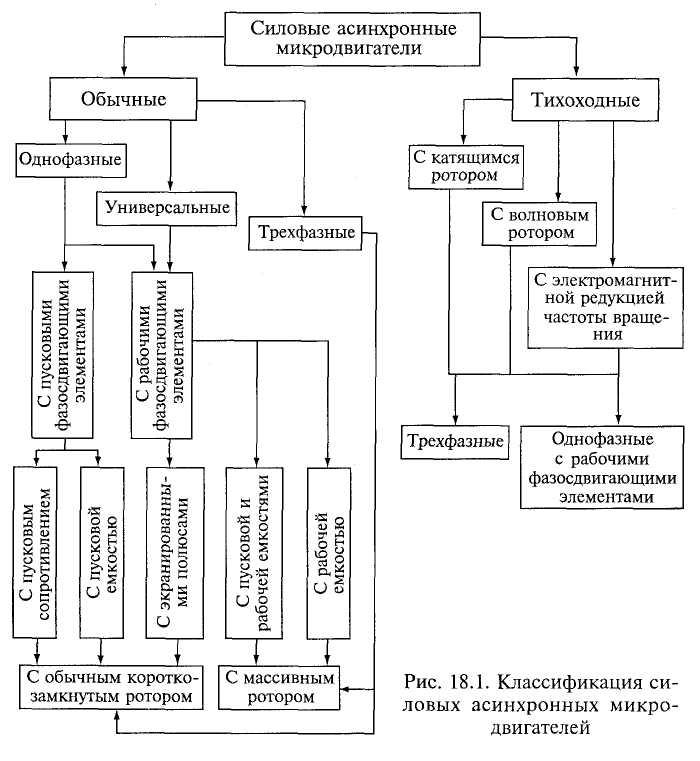

Рисунок 11.1. Классификация силовых асихронных микродвигателей
Применение асинхронных двигателей повышенной частоты в целом ряде случаев диктуется не только стремлением уменьшить габариты машины, но и рядом других соображений: необходимостью иметь более высокие угловые скорости вращения, работой автоматических систем от сетей повышенной частоты и др.
В ряде схем автоматики возникает обратная задача — необходимость получения малых частот вращения п. У асинхронных и синхронных двигателей переменного тока средних и больших мощностей этого можно легко достичь за счет увеличения числа пар полюсов p, так от этого зависит как синхронная частота вращения пс:
![]()
Для двигателей малых мощности и габаритных размеров этот способ практически неприемлем, особенно если они рассчитаны на работу от сетей повышенной частоты. При малых габаритах увеличение числа пар полюсов p, а следовательно, и числа пазов двигателя весьма затруднительно, а иногда и невозможно.
С целью получения низких частот вращения приходится применять специальные тихоходные двигатели либо с электромагнитной редукцией частоты вращения, либо с катящимся или волновым роторами.
В большинстве схем автоматики силовые двигатели питаются не от трехфазных, а однофазных сетей переменного тока. Именно поэтому в качестве силовых в основном используются однофазные двигатели. Трехфазные двигатели в схемах автоматики используются значительно реже.
Однофазные асинхронные двигатели по своему устройству в подавляющем большинстве случаев являются двухфазными. Они, как правило, имеют на статоре две обмотки, сдвинутые в пространстве на 90°. Одна обмотка называется рабочей, или главной. Она подключается непосредственно к однофазной сети. Другая обмотка называется пусковой, или вспомогательной. Она подключается к однофазной сети через фазосдвигающий элемент либо только на время пуска, либо постоянно. В некоторых двигателях вспомогательная обмотка вообще не подключается к сети, а ЭДС в ней наводится потоком главной обмотки.
В зависимости от типа фазосдвигающего элемента, а также от способа использования вспомогательной (пусковой) обмотки силовые однофазные асинхронные (и синхронные) микродвигатели можно разделить на пять групп: с пусковым сопротивлением; пусковым конденсатором; пусковым и рабочим конденсатором; рабочим конденсатором; экранированными полюсами.
Кроме однофазных микродвигателей в системах автоматики в качестве силовых используются также универсальные асинхронные микродвигатели, которые, являясь по своему назначению трехфазными, при изменении схемы соединения обмоток — фаз и включении фазосдвигающих элементов могут работать и от однофазных сетей переменного тока.