

МИНОБРНАУКИ РОССИИ
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
«Тульский государственный университет»
Кафедра «Робототехника и автоматизация производства»
Методические указания
по выполнению курсовой Работы
по дисциплине
«Управление роботами и робототехническими системами»
Уровень профессионального образования: высшее образование – прикладной бакалавриат
Направление подготовки: 15_03_06 «Мехатроника и робототехника»
Профиль подготовки: 15_03_06_04 «Промышленная и специальная робототехника»
Квалификация выпускника: бакалавр, 64
Форма обучения: очная
Тула 2014
Методические указания по выполнению курсовой работы составлены доцентом, к.т.н. Хапкиной Ириной Константиновной и обсуждены на заседании кафедрыробототехники и автоматизации производствафакультетакибернетики,
протокол №___ от "___"____________ 2014 г.
Зав. кафедрой________________Е.В. Ларкин
Методические указания курсовой работы пересмотрены и утверждены на заседании кафедры робототехники и автоматизации производствафакультетакибернетики,
протокол №___ от "___"____________ 20___ г.
Зав. кафедрой________________Е.В. Ларкин
ОБЩАЯ ХАРАКТЕРИСТИКА ВЫПОЛНЕНИЯ КУРСОВОЙ РАБОТЫ
Целью выполнения курсовой работы по дисциплине « Управление роботами и робототехническими системами» является закрепление на практике принципов и методов анализа и синтеза законов управления процессами и системами автоматики, а также манипуляционными системами роботов. Курсовая работа выполняется студентами в 6-том семестре. При выполнении курсовой работы закрепляются теоретические положения, практическое умение и навыки по дисциплине « Управление роботами и робототехническими системами» в процессе анализа технологической задачи, кинематического анализа манипуляционной системы робота, решения прямой и обратной позиционных задач и синтеза его алгоритма управления для движения по прямой из начальной точки в конечную. Задание является индивидуальным, расчеты выполняются с применением ЭВМ. Результаты работы проверяются преподавателем. Пояснительная записка оформляется на 35-35 листах формата А4.
2. ФОРМУЛИРОВКА ЗАДАНИЯ
Задание по курсовой работе формулируется следующим образом:
1. Проанализировать заданную манипуляционную систему. Выбрать АКС и ССК.
2.Закодировать кинематические цепи иркутским методом и по методу Денавита-Хартенберга
3. Записать уравнения связи абсолютных и обобщенных координат в общем виде и со значениями параметров.
4. Используя программное обеспечение кафедры, рассчитать значения абсолютных координат для выбранных значений обобщенных координат.
Для точек 1 и 2.
5. Считая 1-ую расчетную точку исходной, составить программу для расчета закона изменения обобщенных координат для реализации движения по прямой в абсолютной системе координат из точки 1 в точку 2, разбив прямую на сегменты.
6. Описать алгоритм управления манипулятором, реализующим движение рабочего органа по прямой из начальной точки 1 в конечную точку 2.
7. Провести сплайн-интерполяцию управляющих сигналов для организации управляемого движения между точками сегментов.
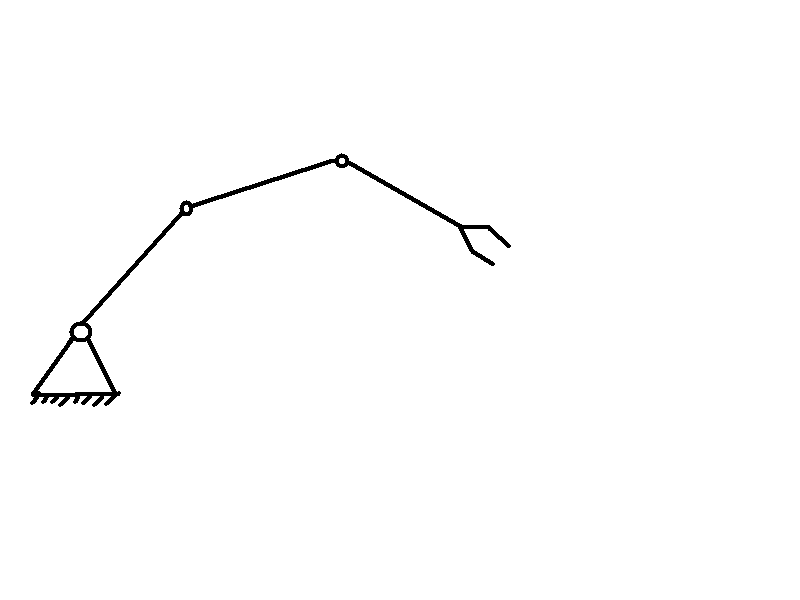
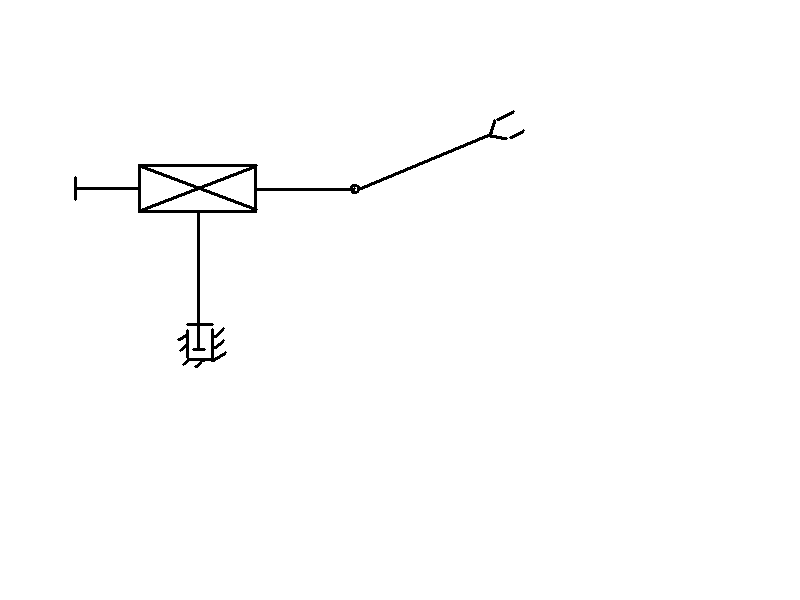
3. ВАРИАНТЫ ЗАДАНИЙ: Вар.1
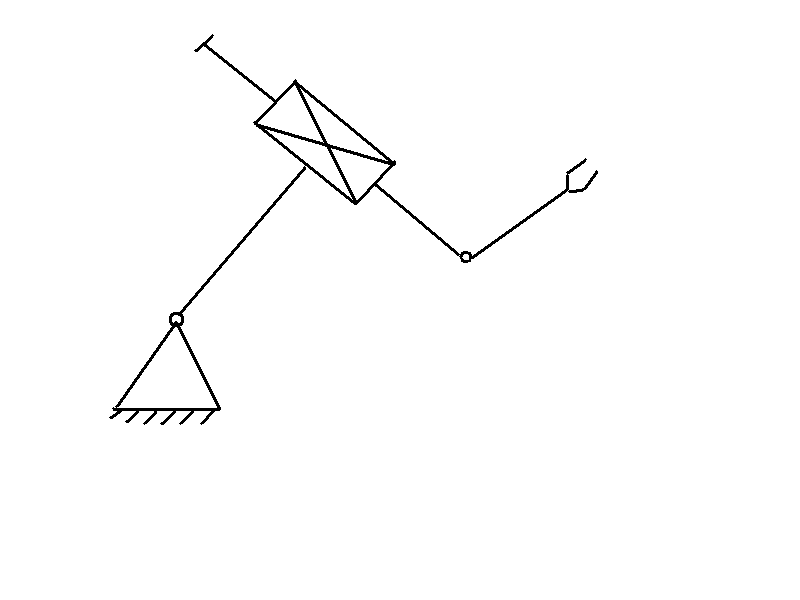
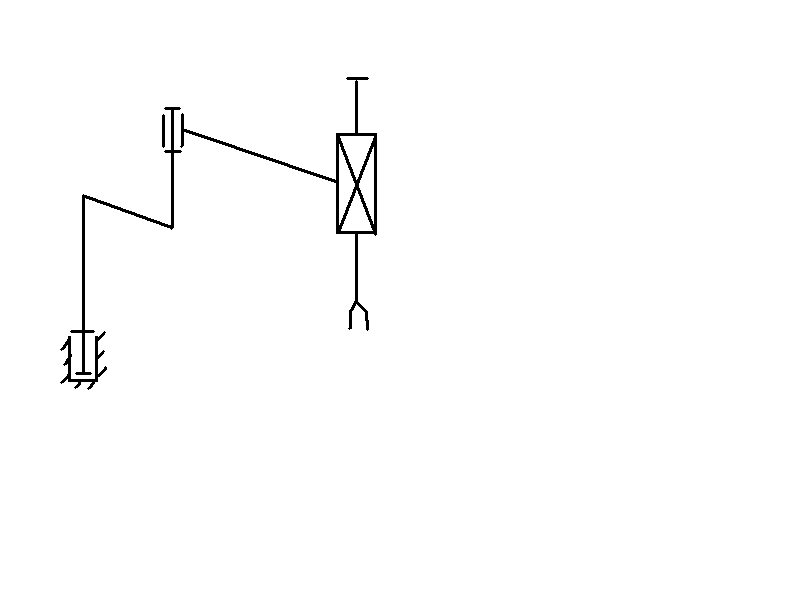
Вар.2

















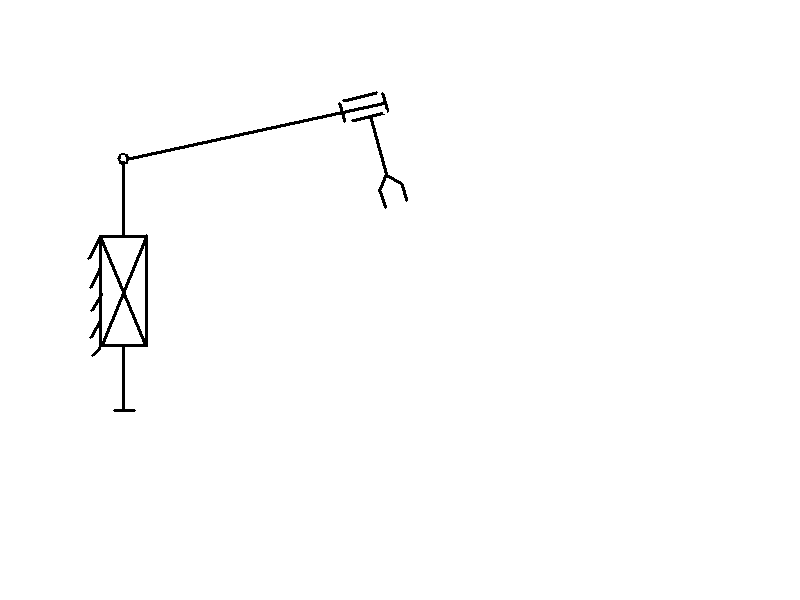
Вар. 3
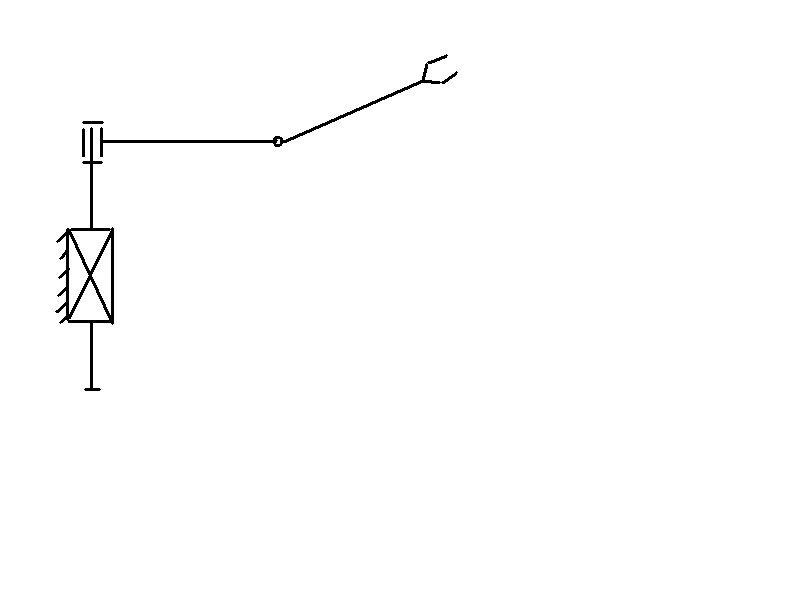
Вар. 4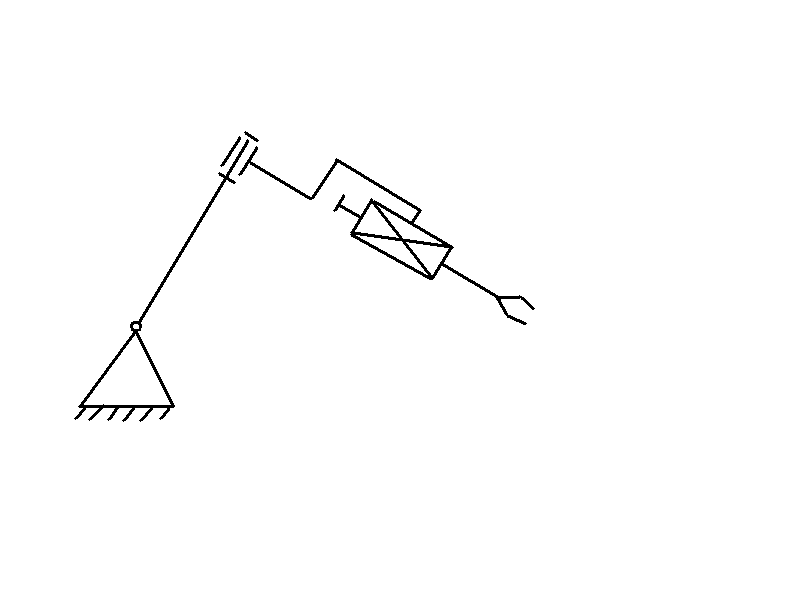
Вар. 5
Вариант 6
Вариант 7

Вариант 8
Вариант 9
Вариант 10

q3
q2
L1
Вариант 11
