6.4 Контрольные вопросы
1) Сколько ступеней подвешивания имеет электровоз, электропоезд?
2) Из каких элементов состоит рессорное подвешивание?
3) Какие параметры проверяют при испытании листовой рессоры?
4) Как определить жесткость рессорного подвешивания одной тележки электровоза?
5) Почему нельзя устанавливать рессоры разной жесткости на тележку?
6) Перечислите основные элементы, входящие в состав стенда испытания листовых рессор?
7) Поясните принцип работы стенда испытания листовых рессор?
Практическая работа № 7
Установка для проверки технического состояния токоприемников
Ц е л ь р а б о т ы: изучить конструкцию и принцип действия установки для проверки технического состояния токоприемников
7.1 Общие положения
Для обеспечения надежной и безотказной работы токоприемника производят его настройку при техническом обслуживании (ТО) в соответствии с установленными нормами. При проведении ТО в депо добиваются того, чтобы статическая характеристика, а также время подъема и опускания токоприемника лежали в пределах, установленных действующими техническими условиями. Величина нажатия токоприемника на контактный провод определяется действием поднимающих пружин и силами трения в шарнирах системы подвижных рам. Сила трения всегда направлена в сторону противоположную направлению движения полоза. Поэтому при движении полоза токоприемника вверх сила трения направлена вниз и вычитается из силы нажатия поднимающих пружин. Эта разность называется величиной активного нажатия токоприемника. При движении полоза токоприемника вниз сила трения направлена вверх и складывается с силой нажатия поднимающих пружин. Эта сумма называется величиной пассивного нажатия токоприемника.
Таким образом, снятие статической характеристики токоприемника производится путем записи активного и пассивного нажатия.
Средняя линия между активным и пассивным нажатием является статической характеристикой. Разность пассивного и активного нажатий равна удвоенной величине трения в шарнирах системы подвижных рам.
При подаче воздуха в цилиндр токоприемника должен обеспечиваться быстрый его подъем на небольшую высоту и последующее медленное приближение его к контактному проводу с прикосновением без удара. При опускании токоприемника (т.е. при выводе его из рабочего положения) необходимо, чтобы полоз быстро оторвался от провода и затем плавно опустился на амортизаторы основания.
7.2 Конструкция и принцип действия
Переносное устройство для диагностирования токоприемников (рисунок 7.1) включает в себя датчик усилия (ДУ), электропривод (ЭП), электронный блок, состоящий из измерительного усилителя (ИУ), аналого-цифрового преобразователя (АЦП), накопителя информации (НИ) и пульта управления (ПУ). После проведения испытаний выход НИ подключается к стационарной ЭВМ для передачи и обработки полученной информации с последующей распечаткой протокола испытаний на принтере.
В качестве датчика усилия в переносном устройстве применен дифференциальный преобразователь индуктивного типа, воспринимающий перемещение одного из концов цилиндрической пружины, на которую воздействует усилие нажатия токоприемника. Устройство датчика приведено на рисунке 7.2.
Питание индуктивного преобразователя осуществляется от генератора частотой 30 кГц, входящего в состав измерительного усилителя ИУ. Кроме того, измерительный усилитель осуществляет усиление сигнала с выхода индуктивного преобразователя и его детектирование. Напряжение с выхода ИУ, пропорциональное усилию нажатия, поступает на вход АЦП.
АЦП осуществляет преобразование аналогового сигнала с выхода ИУ в цифровой код, поступающий в накопитель информации НИ.
Накопитель информации реализован на основе однокристальной ЭВМ серии 1816. В состав накопителя входят также постоянное запоминающее устройство с ультрафиолетовым стиранием и статическое оперативное запоминающее устройство (ОЗУ) объемом по два килобайта.
В накопитель информации с помощью кнопок, расположенных на передней панели электронного блока, вводятся также сведения о номере электровоза, номере и типе токоприемника. Жидкокристаллический индикатор, установленный на передней панели, позволяет контролировать вводимую информацию. Подключение накопителя к ЭВМ осуществляется через COM-порт компьютера.
Программное обеспечение устройства, устанавливаемое на стационарном компьютере, на основе исходных данных, полученных из накопителя информации, строит характеристику нажатия токоприемника, проводит ее анализ и диагностирование неисправности, формирует базу данных.
Электропривод ЭП, содержащий асинхронный двигатель и червячный редуктор, обеспечивает распускание и наматывание троса, закрепленного через датчик усилия на токоприемнике. При этом токоприемник поднимается до верхнего предельного значения, а затем опускается в нижнее рабочее положение. В течение этого времени происходит периодическое срабатывание герметичного магнитоуправляемого реле, замыкание контактов которого производит запуск процесса измерения и запись считанного значения в накопитель информации. Управление электроприводом осуществляется с пульта управления ПУ, расположенного на передней панели электронного блока.
Вид панели управления электронным блоком представлен на рисунке 7.3.
Панель управления электронным блоком содержит следующие кнопки:
«Сеть» – включение блока;
«+/–», «1» и «100» – для выставления чисел на индикаторе;
«Передача» – для запуска процесса передачи массива данных из накопителя информации электронного блока в ЭВМ;
«Пуск» – для запуска процесса измерения и записи статической характеристики в автоматическом режиме;
«Привод» – для управления приводом в ручном режиме;
«Работа/Настройка» – для переключения режимов работы с приводом;
«Реверс» – позволяет переключить направление вращения приводного двигателя для намотки или размотки тросика.
Тумблер на панели управления служит для переключения режима индикации и включения режимов ввода данных:
«№Э» и «№П» – с помощью кнопок «+/–», «1» и «100» возможен ввод номера электровоза, на котором расположен испытуемый токоприемник, и номера самого токоприемника;
«Тип» – возможен ввод типа токоприемника в соответствии с его кодом в табл. 11;
«№И» – возможен ввод длины размотки тросика в автоматическом режиме работы привода;
«Р,кГ» – на индикаторе отображается текущее значение усилия нажатия, регистрируемое датчиком;
«ЭВМ» – возможен запуск процесса передачи данных из накопителя информации в ЭВМ через COM-порт после нажатия кнопки «Передача»;
«Батарея» – на индикаторе отображается текущее значение напряжения батарей, служащих для питания 4,5 В (3 батареи по 1,5 В).
Для обработки результатов испытаний токоприемника на ЭВМ установлено разработанное для этой цели в программной среде С++BuilderприложениеTokopr.exe. Данное приложение имеет несколько режимов работы:
режим главного меню (рисунок 7.4) – предназначен для ввода информации об имени испытателя, COM-порте, через который электронный блок подключен к компьютеру, сезоне (зима или лето), а также для возможности перехода в другие режимы;
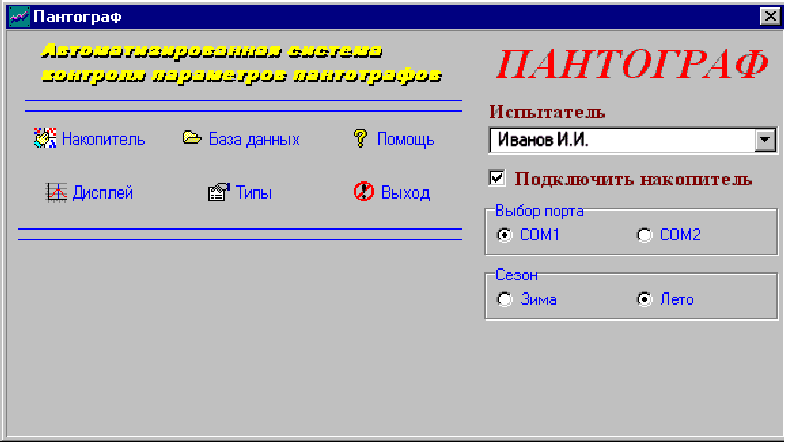
Рисунок 7.4 – Режим главного меню
в режиме «База данных токоприемников» (рисунок 7.5) – отображаются данные о произведенных испытаниях токоприемников;
режим «Протокол испытаний» (рисунок 7.6) – выполнен в виде одной страницы, на которой представлены все данные о проведенном испытании.
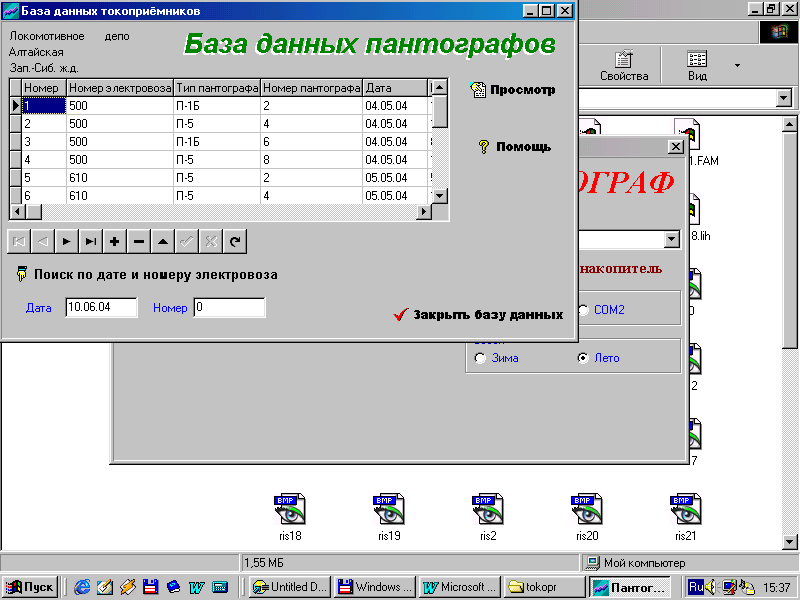
Рисунок 7.5 – Режим «База данных токоприемников»

Рисунок 7.6 – Режим «Протокол испытаний»
Для измерения временной характеристики токоприемника в «УИВП» применен датчик угловых перемещений ДУП-1А3.
Датчик угловых перемещений устанавливается в месте шарнирного соединения рам токоприемника, как показано на рисунке 7.9. ДУП регистрирует изменение угла поворота рам токоприемника друг относительно друга. Аналоговый сигнал с ДУП поступает в электронный блок, где он преобразовывается в цифровой сигнал и записывается в память накопителя.
Для пояснения устройства и принципа работы прибора «УИВП» на рисунке 7.7 представлена его функциональная схема.
Устройство для измерения временных характеристик «УИВП» включает в себя датчик угловых перемещений (ДУП), электронный блок, состоящий из измерительного усилителя (ИУ), аналого-цифрового преобразователя (АЦП), накопителя информации (НИ) и пульта управления (ПУ). После проведения испытаний выход НИ подключается к стационарной ЭВМ для передачи и обработки полученной информации с последующей распечаткой протокола испытаний на принтере.
Вид панели управления электронным блоком представлен на рисунке 7.8.
Панель управления электронным блоком содержит элементы со следующими условными обозначениями:
«Пит» – кнопка включения питания с расположенным над кнопкой индикатором включенного состояния прибора;
«Сбр» – кнопка очистки содержимого ОЗУ;
«Зап» – кнопка включения процесса записи временной характеристики токоприемника;
«Прд» – кнопка запуска процесса передачи информации в ЭВМ;
«Раб» – индикатор процесса снятия временной характеристики токоприемника;
«ОЗУ» – индикатор заполнения ОЗУ (загорается после проведения восьми измерений);
«Датчик» – разъем для подключения кабеля от датчика угловых перемещений;
«ЭВМ» – разъем для кабельного соединения с COM-портом компьютера.