

-
Побудова і розрахунок схеми електричної принципової
На основі структурної схеми приладу було складено схему електричну принципову. Побудова електричної принципової схеми важливий етап у розробці апаратури, оскільки в кінці цього етапу отримуємо працюючу схему приладу, тому проектування найкраще проводити поетапним шляхом, який передбачає поступовий перехід від нагромадження експериментальних даних і вихідних величин до синтезу схеми.
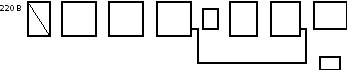
Напруга 220 В з мережі подається через трансформатор Т1, проходить через діодний міст D1, фільтр низьких частот, який реалізується за допомогою конденсаторів С5 та С10, після чого проходить через стабілізатор D2. Далі після ключа J1 вона подається на коливальний контур (L3 та C1), де утворюються гармонічні коливання заданої частоти. Згенерований сигнал поступає на транзисторний підсилювач (Q2 та Q3). Після підсилення сигнал поступає на випромінювальну котушку L4, де через індукційний канал передається на приймальну котушку L5. Моніторинг роботи приладу здійснюється за допомогою індикаторів (X1 та X2).
Розташуємо вісь
симетрії даної задачі вертикально.
Нехай
 і
і  ‒
відповідно ширина і висота області
поперечного перерізу випромінюючої
(source)
котушки, а
‒
відповідно ширина і висота області
поперечного перерізу випромінюючої
(source)
котушки, а
 ‒ число
витків цієї котушки. Для приймальної
(receive)
котушки аналогічні параметри будуть
позначатись
‒ число
витків цієї котушки. Для приймальної
(receive)
котушки аналогічні параметри будуть
позначатись
 і
і  .
.
Вважатимемо, що витки проводу займають весь простір області січення, тобто між ними немає проміжків. При одиничному струмі в проводі передавальної котушки густина струму дорівнюватиме:
 (8)
(8)
Для приймальної котушки при одиничній величині струму в проводі передавальної котушки густина струму дорівнюватиме:
 (9)
(9)
Розрахуємо активну
потужність у випромінюючій котушці,
визначивши напругу наводки на її виводах.
Нехай
 ‒ площа
перерізу одного провідника. Очевидно,
що
‒ площа
перерізу одного провідника. Очевидно,
що
 .
Для розрахунку величини напруги
(позначимо її
.
Для розрахунку величини напруги
(позначимо її
 )
необхідно
підсумувати значення ЕРС, що наводяться
в окремих провідниках:
)
необхідно
підсумувати значення ЕРС, що наводяться
в окремих провідниках:
 . (10)
. (10)
При малій величині
 останній вираз в (10) співпаде з величиною
інтеграла по об’єму:
останній вираз в (10) співпаде з величиною
інтеграла по об’єму:
 (11)
(11)
При одиничному струмі котушки половина реальної частини виразу (11) відповідає випромінюваній потужності (зі знаком мінус, бо активна потужність визначається величиною протиЕРС), а половина уявної частини цього виразу характеризує потужність, запасену в індуктивності (реактивна потужність).
Для приймальної котушки аналогічно (10) можна знайти величину напругу, що наводиться на її виводах:
 (12)
(12)
Нехай
 ‒
провідність навантаження, підключеного
до виводів приймальної котушки. Тоді
значення струму дорівнюватиме
‒
провідність навантаження, підключеного
до виводів приймальної котушки. Тоді
значення струму дорівнюватиме
 ,
а густина дорівнюватиме:
,
а густина дорівнюватиме:
 (13)
(13)
За наявності провідних середовищ з різними значеннями питомої провідності (тіло людини, корпус імплантанта) рішення системи (5) в аналітичному виді стає надзвичайно складним, тому необхідно використовувати програми числового розрахунку, такі як FlexPDE. При описі областей, зайнятих котушками, в цій програмі необхідно задавати нульове значення провідності і ненульову величину густини струму. Для передавальної котушки ця величина є константою, що задається виразом (8), а для приймальної котушки буде визначатись по формулі (13).
Однак такий підхід
натикається на проблеми чисельної
стійкості методів розрахунку. Для чисто
активної провідності навантаження
 ще вдається
знайти рішення, але для реактивного
навантаження процес розрахунку
розходиться.
ще вдається
знайти рішення, але для реактивного
навантаження процес розрахунку
розходиться.
Для подолання нової перешкоди можна скористатись принципом суперпозиції полів (завдяки лінійності системи рівнянь (5)), і провести розрахунок за такою методикою:
Задаємо ненульову
густину струму в області випромінюючої
котушки за формулою (8) і нульову густину
струму в приймальній котушці, після
чого по формулах (11) і (12) проводимо
розрахунок напруг на виводах приймальної  і передавальної
і передавальної  котушок;
котушок;
Задаємо нульову
густину струму в області випромінюючої
котушки і ненульову густину струму в
приймальній котушці за формулою (9),
після чого проводимо розрахунок напруг
на виводах приймальної  і передавальної
і передавальної  котушок;
котушок;
Приймаючи до
уваги знаки величин напруг і струмів,
і розглядаючи напруги, як падіння напруги
на опорах деякого чотирьохполюсника,
можна зробити висновок проте, що величини
 і
і
 є взятими зі знаком мінус компонентами
матриці опорів
є взятими зі знаком мінус компонентами
матриці опорів
 ,
що зв’язує струми в котушках і наведені
в них напруги.
,
що зв’язує струми в котушках і наведені
в них напруги.
 (14)
(14)
У виразі (14)
 і
і
 ‒ напруги на вході і виході еквівалентного
чотирьохполюсника. З урахуванням того,
що
‒ напруги на вході і виході еквівалентного
чотирьохполюсника. З урахуванням того,
що
 (відповідно до правил вимірювання
струмів і напруг на виводах
чотирьохполюсника), після рішення
системи рівнянь (14) легко отримуються
всі необхідні величини.
(відповідно до правил вимірювання
струмів і напруг на виводах
чотирьохполюсника), після рішення
системи рівнянь (14) легко отримуються
всі необхідні величини.
Напруга на виводах приймальної котушки:
 (15)
(15)
Потужність при навантаженні:
 (16)
(16)
Активна потужність при навантаженні:
 (17)
(17)
Напруга на виводах випромінюючої котушки:
 (18)
(18)
Активна випромінювана потужність:
 (19)
(19)
Коефіцієнт корисної дії:
 (20)
(20)
З (16), прирівнявши
нулю похідну
 по величині
по величині
 і розв’язавши дане рівняння отримаємо
вираз для оптимальної величини
навантаження:
і розв’язавши дане рівняння отримаємо
вираз для оптимальної величини
навантаження:
 (21)
(21)
звідки після підстановки в (16) отримаємо вираз для максимальної величини потужності при навантаженні:
 (22)
(22)
Для визначення
потенційних можливостей системи
черезшкірного живлення був проведений
розрахунок конструкції, в якій відсутній
електропровідний корпус приладу
(провідність ).
Задамо такі геометричні параметри
системи:
).
Задамо такі геометричні параметри
системи:
-
Внутрішній радіус передавальної котушки
 мм;
мм; -
Число витків передавальної котушки
 ;
; -
Ширина січення області витків передавальної котушки
 мм;
мм; -
Висота січення області витків передавальної котушки
 мм;
мм; -
Відстань від передавальної котушки до межі поділу середовищ
 мм;
мм; -
Внутрішній радіус приймальної котушки
 мм;
мм; -
Число витків приймальної котушки
 ;
; -
Ширина січення області витків приймальної котушки
 мм;
мм; -
Висота січення області витків приймальної котушки
 мм;
мм; -
Відстань від приймальної котушки до межі поділу середовищ
 мм;
мм; -
Частота збудження
 кГц.
кГц.
Результати розрахунку (з урахуванням активних опорів обмоток, які були прийняті рівними 0,5 Ом):

По формулі (22) при
струмі котушки збудження
 A
отримуємо потужність при навантаженні
A
отримуємо потужність при навантаженні
 Вт.
Вт.
РОЗДІЛ 3 МЕТРОЛОГІЧНЕ ЗАБЕЗПЕЧЕННЯ СИСТЕМИ ЧЕРЕЗШКІРНОГО ЖИВЛЕННЯ
-
В Визначення похибки математичного моделювання функцій системи черезшкірного живлення
-
Визначення похибки від неточності радіоелементів схеми та її робастності
-
Побудова методики, програм та оформлення результатів метрологічних випробувань
ВИСНОВКИ
У процесі виконання курсової роботи, було спроектовано селектор діапазону адрес, заданих 8-ми розрядним кодом, на виході якого має бути сформована логічна одиниця, при наявності на його вході, будь-якої адреси із заданого діапазону. А також нестандартний лічильник з програмованим режимом роботи, що працює з кодом 8421, та модулем рахування 10.
Для мінімізації функцій використано інструмент Logic Converter,програми Multisim.
Для практичної реалізації даної схеми, використовуємо ТТЛ логіку серії SN74. Конструювання схем електричних принципових, здійснено за допомогою програми Multisim.
ПЕРЕЛІК ВИКОРИСТАНОЇ ЛІТЕРАТУРИ
-
Методичні вказівки методичні вказівки до курсового проекту з дисципліни “ основи побудови і застосування біотехнічних та медичних електронних апаратів “ для студентів спеціальності 7.091002 “Біотехнічні та медичні апарати і системи” – Тернопіль, ТНТУ ім. Івана Пулюя, 2003 р.;
-
Робоча програма з дисципліни “ основи побудови і застосування біотехнічних та медичних електронних апаратів“ для студентів спеціальності 7.0911002 “Біотехнічні та медичні апарати і системи” – Тернопіль, ТДТУ ім. Івана Пулюя, 2003
Додатки
Додаток А
Додаток B