

Методичка № 7 8
.pdfМинистерство образования Республики Беларусь
Белорусско–Российский университет
Кафедра” Электропривод и АПУ ”
Э
П
А 
 П
П
 У
У
Методические материалы к проведению лабораторных и практических занятий
Цикл 2
по курсу ”Элементы автоматизированного электропривода постоянного тока”
Могилев, 2005
Составители: проф. Парфенович О.Н. асс. Максимович М. С.
Методические материалы к проведению лабораторных и практических занятий. Цикл 2 “Элементы автоматизированного электропривода постоянного тока”. Работы № 7, № 8. –Могилев: Белорусско–Российский университет, 2005.
Данное пособие предназначено для студентов дневной и заочной форм обучения специальности Т.11.02.00 –“Автоматизированный электропривод”. В нем изложены необходимые сведения для выполнения лабораторных и практических работ по изучению курса “Элементы автоматизированного электропривода постоянного тока”.
1. Элементы автоматизированного электропривода постоянного тока.
Общие сведения об исследуемом электроприводе.
1.1 Назначение
Электропривод постоянного тока общепромышленного применения типа ЭТ – 6 предназначен для регулирования и стабилизации частоты вращения электродвигателя постоянного тока в диапазоне 1÷10000.
Электропривод предназначен для работы в закрытых отапливаемых помещениях при следующих условиях:
1)высота над уровнем моря 1000 м.;
2)размещается в электрошкафах;
3)температура окружающего воздуха (внутри шкафа) от +5 до +45 0С;
4)относительная влажность окружающего воздуха 80% при температуре
30 0С.
Окружающая среда не взрывоопасная, не содержащая токопроводящей пыли, агрессивных газов и паров в помещениях, разрушающих металлы и изоляцию. Содержание масел и пыли – в пределах санитарных норм.
1.2 Основные технические данные и их характеристики.
Основные технические параметры электропривода должны соответствовать данным, указанным в таблице 1.1.
Таблица 1.1 – технические параметры электропривода.
Наименование параметра. |
Требования технических |
|
условий. |
Напряжение сети, В |
380 +10%, -15% |
Частота сети, Гц |
50 ± 1 |
Мощность электродвигателя, кВт |
0,6+11,3 |
Максимальный диапазон регулирования |
10000 |
частоты вращения электродвигателя |
|
Значения допустимых погрешностей и коэффициента неравномерности частоты вращения при различных диапазонах регулирования не должны превышать значений, указанных в таблице 1.2.
Электроприводы обеспечивают работу во всех четырех квадрантах механической характеристики при изменении управляющего напряжения в пределах ±10 В.
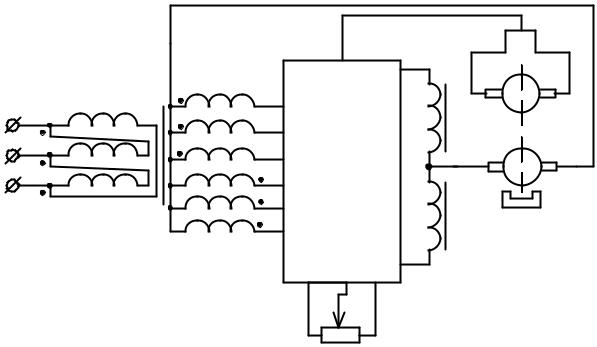
Таблица 1.2 – погрешности и коэффициент неравномерности частоты вращения.
Диапазон |
Погрешность частоты вращения, % не более |
Коэффициент |
||
частоты |
Суммарная |
Погрешность |
Погрешность |
|
вращения. |
погрешность |
при |
при |
неравномерности |
|
|
изменении |
изменении |
|
|
|
нагрузки |
направления |
|
|
|
|
вращения |
|
1 |
±2 |
0,5 |
0,5 |
0,1 |
10 |
±2 |
0,5 |
0,5 |
0,1 |
100 |
±10 |
±2 |
±5 |
0,1 |
1000 |
±15 |
±5 |
±5 |
0,2 |
10000 |
±0,25 |
±10 |
±10 |
0,2 |
1.3 Конструкция электропривода.
Электропривод (рисунок 1) состоит из преобразователя UZ, двигателя М со встроенным тахогенератором BR, согласующего трансформатора TV, задатчика частоты вращения RP, токоограничивающих реакторов L1 и L2.
Электропривод конструктивно представляет собой комплектное устройство, выполненное в открытом исполнении (степень защиты IP00) и предназначенное (кроме электродвигателя) для встройки в электрошкаф.
|
|
UZ |
BR |
TV |
X1 |
|
|
|
L1 |
||
А |
Y1 |
|
|
В |
Z1 |
|
М |
С |
A1 |
|
|
|
B1 |
|
|
|
C1 |
|
L2 |
RP
Рисунок 1.– Конструкция электропривода.
1.4 Структурная схема электропривода
Схема приведена на рисунке 2, где UV – регулятор скорости, UA – регулятор тока, UTO=f(n) – узел взаимного токоограничения, UZ – тиристорный преобразователь, ВА – датчик тока, BR – датчик скорости, Ra – эквивалентное
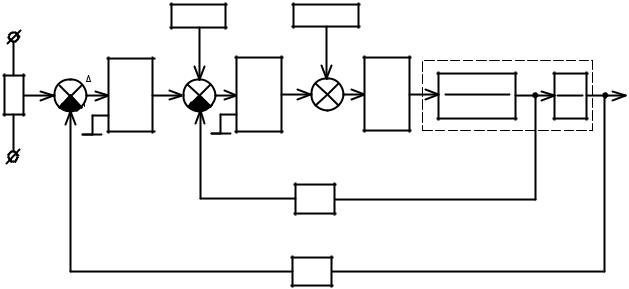
сопротивление якорной цепи, ТЯ – электромагнитная постоянная времени, ТМ – Электромеханическая постоянная времени, К – конструктивный коэффициент, UЗ – задающее напряжение, UОГР=f(UC) – узел ограничения максимального угла управления, UДС – напряжение датчика скорости, ∆U – разность (UЗ – UДС), UРС
– напряжение на выходе регулятора скорости, UТО – напряжение узла токоограничения, UДТ – напряжение на выходе датчика тока, ∆U2 – разность (UРС – UДТ), UРТ – напряжение на выходе регулятора тока, U – напряжение на якоре электродвигателя, IЯ – ток якоря двигателя, n – частота вращения электродвигателя, М – двигатель.
Принципиальная электрическая схема электропривода приведена на плакате в лаборатории.
|
|
|
Uто=f(n) |
|
Uогр=f(Uc) |
|
|
|
|
|
|
|
|
|
Uогр |
Uя |
|
|
|
UV |
|
|
UA |
UZ |
|
|
Uз |
U1 |
U |
U |
Uрт |
n |
|||
|
рс |
х |
|
1 |
||||
|
|
|
|
|
|
|
Rя |
|
|
|
|
|
|
|
|
R*(Тя*р+1) |
Тм*К |
|
|
|
|
|
|
|
я |
|
Uдс Uдт
BA
BR
Рисунок 2.– Структурная схема электропривода.
1.5 Принцип работы электропривода.
Электропривод состоит из двух замкнутых контуров подчиненного регулирования: контура тока (КТ) и контура скорости (КС).
Работа электропривода осуществляется следующим образом:
При наличии рассогласования (∆U1) на входе регулятора скорости (РС), на его выходе формируется сигнал пропорциональный этому рассогласованию, который, сравниваясь с текущим значением тока якоря, поступает на вход регулятора тока UA. Регулятор тока усиливает эту разность и подает управляющее напряжение на схему формирования управляющих импульсов (СИФУ), функция которой заключается в формировании и распределении импульсов управления силовыми тиристорами. По мере уменьшения рассогласования (под действием отрицательной обратной связи по частоте вращения) происходит стабилизация частоты вращения двигателя на уровне пропорциональном напряжению.
Коэффициент усиления системы регулирования обеспечивает необходимый диапазон регулирования и достаточную точность поддержания частоты вращения при различных возмущающих воздействиях.
Ограничения тока якоря двигателя осуществляются путем ограничения напряжения выхода регулятора скорости.
Предусмотрено зависимое ограничение тока в функции частоты вращения. В состав тиристорного преобразователя электропривода входят:
1)силовой блок;
2)схема формирования управляющих импульсов;
3)усилитель – регулятор скорости;
4)усилитель – регулятор тока с датчиком тока и схемой ограничения производной регулятора тока;
5)схема ограничения минимального угла управления;
6)схема ограничения тока якоря;
7)схема защиты;
8)блок питания;
9)схемы дополнительного управления.
1.6 Лабораторный стенд для исследования электропривода постоянного тока ЭТ – 6.
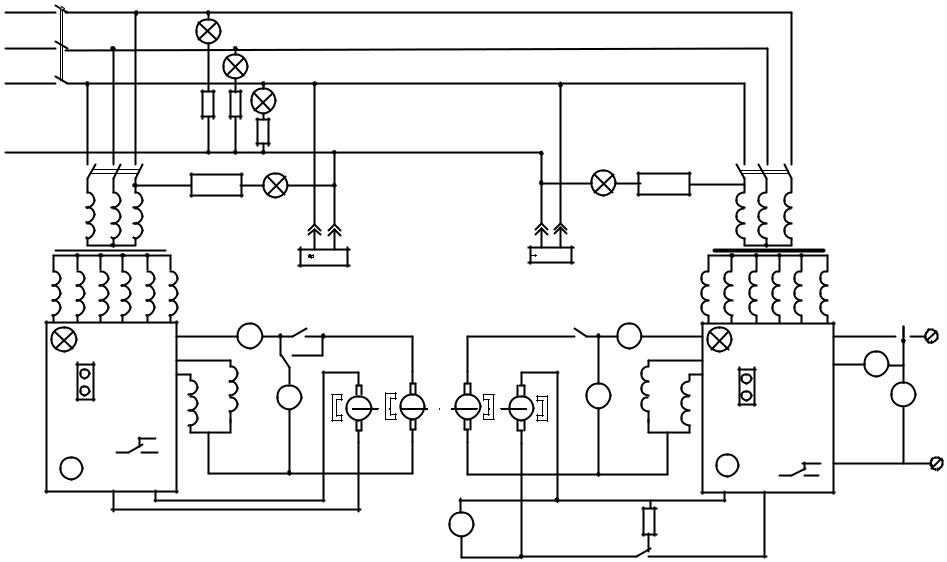
Схема электрическая принципиальная стенда показана на рисунке 3 и на левой панели стенда.
При включении автомата QF1 подается напряжение 220/380 В на стенд о чем сигнализируют лампочки HL1 – HL3.
При включении автомата QF2 подается напряжение на тиристорный преобразователь UZ1 типа ЭТ – 6, о чем сигнализирует лампочка HL4.
При включении автомата QF3 подается напряжение на тиристорный преобразователь UZ2 типа ЭТ – 6, о чем сигнализирует лампочка HL5.
Преобразователь UZ2 на стенде является исследуемым. В качестве нагрузки этого преобразователя используется моментный двигатель постоянного тока М2. Регулируется нагрузка двигателя М2 преобразователем UZ1, который питает двигатель М1, механически через вал связанный с двигателем М2. Включается преобразователь UZ2 кнопкой SB2, а нагрузочный двигатель М2 включается переключателем S3. Частота вращения двигателя М2 устанавливается регулятором RP2 и контролируется прибором Pn.
При необходимости регулировать нагрузку двигателя М2 нажатием кнопки SB1 включают преобразователь UZ1. Регулятором RP1 настраивают преобразователь UZ1 на такое выходное напряжение, чтобы оно было равно ЭДС двигателя М1, которое проверяется вольтметром PV1, соответствующими переключателями тумблера S2, после чего включателем S1 подается напряжение от преобразователя UZ1 на двигатель М1. Регулирование тока нагрузки двигателя М1 в дальнейшем осуществляется регулятором RP1.
Переключатели S6 и S7 в исходном состоянии находятся в положении 1. Для снятия частотных характеристик генератора UZ3 задающей переменной частоты включается в розетку Х1, осциллограф UZ4 включается в розетку Х2. На правой стороне стенда и на рисунке 3 показана развернутая принципиальная схема преобразователя ЭТ – 6 с выделением его основных блоков: силового, блока системы импульсно-фазового регулирования (СИФУ), регулятора скорости и регулятора тока, блоков управления, блокировок и защиты.
2. Лабораторная работа № 7 (4 часа)
Исследование электропривода и его силового блока.
2.1 Цель работы.
Целью лабораторной работы является практическое ознакомление с принципом действия силового блока преобразователя электропривода, исследование статических и динамических характеристик преобразователя, определение его расчетных параметров, как звена системы автоматического регулирования.
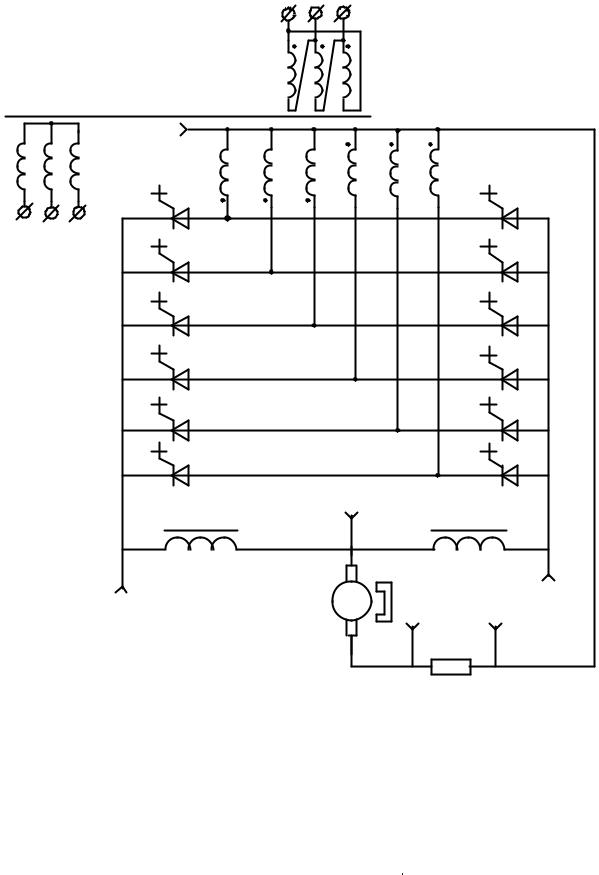
2.2 Описание схемы принципиальной (рисунок 4).
Силовая схема преобразователя электропривода состоит из согласующего трансформатора TV13, управляемого выпрямителя VS1–VS12, токоограничивающих реакторов L1, L2. Трансформатор трехфазный имеет две силовые обмотки и обмотку для питания цепей управления. Между силовой обмоткой и обмоткой управления проложен экран.
|
V |
A |
QF |
|
|
|
|
|
|
1 |
|
|
|
|
|
||
Рисунок |
220/380 |
|
|
|
|
|
||
C |
|
|
|
HL1 |
|
|
||
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
HL2 |
|
|
.3 |
|
|
|
|
|
|
HL3 |
|
– |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Принципиальная |
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
HL4 |
|
|
|
|
|
TV1 |
|
|
|
X1 |
|
|
|
|
|
|
|
|
|
схема |
|
|
|
|
|
|
|
UZ3 |
|
|
|
|
|
|
|
|
|
лабораторного |
|
|
|
|
|
PA1 |
S1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
HL4 |
UZ1 |
|
A |
S2 |
|
|
|
|
SB1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L4 |
PV1 |
BR1 |
|
|
|
|
|
|
|
||
|
|
|
|
|
L3 |
V |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
стенда. |
RP1 |
S4 |
|
|
|
|
|
|
HL5 |
|
|
|
|
|
|
|
X2 |
|
|
TV2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
UZ4 |
|
|
|
|
|
|
|
|
|
S3 |
PA2 |
|
|
S7 |
|
|
|
|
A |
HL5 |
1 |
2 |
3 |
|
|
|
|
|
|||||
|
|
|
|
PA3 |
|
|||
|
|
|
|
|
|
|
||
|
|
|
|
|
SB2 |
A |
|
|
|
|
|
|
PV2 |
|
PV3 |
|
|
M1 |
M2 |
BR2 |
|
L1 |
|
|
||
|
V |
|
V |
|
||||
|
|
|
|
|||||
|
|
|
|
L2 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RP2 |
|
|
4 |
|
|
|
|
|
|
S5 |
|
|
Pn |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
S4 |
|
|
|
|
|
|
|
|
1 |
|
|
|
A B C
TV1
VS1
A1 |
B1 |
C1 |
X1 |
Y1 |
Z1 |
VS3
VS5 |
|
VS7 |
|
VS9 |
|
VS11 |
|
L1 |
L2 |
|
M1 |
1 |
4 |
|
|
|
Rш |
VS2
VS4
VS6
VS8
VS10
VS12
2
0
Рисунок 4.–Силовая схема электропривода.
3. Лабораторная работа № 8
Исследование формирования управляющих импульсов преобразователя
3.1.Цель работы Целью лабораторной работы является практическое ознакомление с
принципом действия системы формирования управляющих импульсов (СИФУ) тиристоров комплектного электропривода ЭТ-6.
3.2.Описание принципиальной схемы (рисунок 3.1.)
СИФУ осуществляет формирование и распределение управляющих импульсов на тиристоры силовой схемы и состоит из 6-ти идентичных каналов управления.
Принцип работы схемы рассмотрим на примере канала фазы А1. На рисунке 3.2 приведена векторная диаграмма формирования опорного напряжения для канала А1.