

Теперь из соотношения (10.4) вытекает
![]()
Суммируя
приращения напряжений от снятия всех
предыдущих слоев, получим дополнительное
напряжение в слое а,
учитывая, что в начальный момент прогиб
стержня отсутствует, т.е.
![]()
 (10.5)
(10.5)
Интегрируя
по частям, можно показать, что
![]() поэтому зависимость (10.5) можно представить
в виде:
поэтому зависимость (10.5) можно представить
в виде:

Зная
величины
![]() и
и![]() ,
получим из равенства (10.2) основную
расчетную формулу для определения
остаточных напряжений
,
получим из равенства (10.2) основную
расчетную формулу для определения
остаточных напряжений
 (10.6)
(10.6)
Если
величина
![]() ,
полученная в расчете, оказалась
положительной, то остаточные напряжения
в слое растягивающие. Прогиб
,
полученная в расчете, оказалась
положительной, то остаточные напряжения
в слое растягивающие. Прогиб![]() считается положительным, если при изгибе
стержня его выпуклость направлена в
сторону снятого слоя.
считается положительным, если при изгибе
стержня его выпуклость направлена в
сторону снятого слоя.
Для
определения остаточных напряжений по
формуле (10.6) надо знать не только величину
прогиба в данный момент, но и располагать
зависимостью прогиба f
от толщины а
снятого слоя. Эту зависимость получают
экспериментально и представляют в
координатах f
- a.
На основе анализа этой зависимости
определяют значения производной
![]() и интеграла
и интеграла![]() используя, например, известный
математический пакетMathCAD
7.0 Pro
для ПЭВМ.
используя, например, известный
математический пакетMathCAD
7.0 Pro
для ПЭВМ.
Метод замера деформаций. Для измерения деформаций широко применяются проволочные тензорезисторы. Они используются также и при исследовании остаточных напряжений. Рассмотрим порядок определения остаточных напряжений при замере деформаций проволочными тензорезисторами, которые в этом случае наклеены на грань стержня (рис.10.20) и защищены от стравливания.
Расчетная
зависимость получается так же, как и
при замере прогибов. Напряжение
![]() ,
существующее в слоеа
после удаления всех предыдущих слоев,
может быть найдено, если известно
изменение в крайнем нижнем слое деформации
,
существующее в слоеа
после удаления всех предыдущих слоев,
может быть найдено, если известно
изменение в крайнем нижнем слое деформации
![]() при снятии слояda.
при снятии слояda.
Так
как снятие этого слоя эквивалентно
приложению к стержню дополнительного
усилия dN
=
![]() ,
то в крайнем нижнем волокне возникнут
дополнительные напряжения от изгиба
моментом dM
= dN
(h-a)/2
=
,
то в крайнем нижнем волокне возникнут
дополнительные напряжения от изгиба
моментом dM
= dN
(h-a)/2
=![]() (h-a)/2,
т.е.
d
(h-a)/2,
т.е.
d![]() и
= dM/W,
где W
– осевой
момент сопротивления сечения стержня
изгибу, равный W
= b(h-a)2/6.
Тогда после преобразования получим
следующую зависимость
и
= dM/W,
где W
– осевой
момент сопротивления сечения стержня
изгибу, равный W
= b(h-a)2/6.
Тогда после преобразования получим
следующую зависимость
![]() .
.
Дополнительные
напряжения растяжения составят d![]() p
= dN
/ A,
или
p
= dN
/ A,
или
![]() .
.

Приращению
напряжений d![]() и
и d
и
и d![]() p
в крайнем волокне будет соответствовать
приращение деформации, которое, согласно
закону Гука, составит
p
в крайнем волокне будет соответствовать
приращение деформации, которое, согласно
закону Гука, составит ![]() , откуда получим напряжение, существующее
в слоеа
после удаления предыдущих слоев
, откуда получим напряжение, существующее
в слоеа
после удаления предыдущих слоев
![]() (10.7)
(10.7)
Для
вычисления первоначальных остаточных
напряжений в слое
![]() необходимо знать, какие дополнительные
напряжения возникли в этом слое. Если
в данный момент снимается слой
необходимо знать, какие дополнительные
напряжения возникли в этом слое. Если
в данный момент снимается слой![]() (рис.10.16), то это эквивалентно приложению
усилияdN
=
(рис.10.16), то это эквивалентно приложению
усилияdN
=
![]() ,
и в слое
а возникают
напряжения изгиба и растяжения.
Напряжения изгиба
,
и в слое
а возникают
напряжения изгиба и растяжения.
Напряжения изгиба
d![]() и=
dM
c/I,
и=
dM
c/I,
где
dM
= dN(h-![]() )/2
=
)/2
=
![]() (h-
(h-![]() )/2,
I
= b(h-
)/2,
I
= b(h-![]() )3/12
, c
=(h+
)3/12
, c
=(h+![]() -2a)/2
, следовательно,
-2a)/2
, следовательно,
d![]() и
= 6 с
и
= 6 с
![]() /(h-
/(h-![]() )2.
)2.
Напряжения растяжения
d![]() p
= dN
/ dA
=
p
= dN
/ dA
=
![]() /b(h-
/b(h-![]() )
=
)
=
![]() / (h-
/ (h-![]() ).
).
Таким образом, дополнительные напряжения будут
![]() (4h
+ 2
(4h
+ 2
![]() - 6 a)
/ (h
-
- 6 a)
/ (h
-
![]() )2
(10.8)
)2
(10.8)
Напряжение
![]() в самом слое
в самом слое![]() после снятия предыдущих слоев можно
найти из формулы, аналогичной формуле
(10.7):
после снятия предыдущих слоев можно
найти из формулы, аналогичной формуле
(10.7):
![]() (10.9)
(10.9)
Теперь из соотношений (10.8) и (10.9) получим
![]()
Суммируя
элементарные d![]() по всему сечению, получим дополнительное
напряжение в слое
по всему сечению, получим дополнительное
напряжение в слое
![]() ,
возникшее в результате снятия предыдущих
слоев,
,
возникшее в результате снятия предыдущих
слоев,
![]()
С помощью интегрирования по частям находим
![]() (10.10)
(10.10)
Теперь
в соответствии с (10.2) найдем остаточное
напряжение в слое а,
подставив значения
![]() и
и![]() по (10.7) и (10.10). После преобразования
получим следующую расчетную формулу:
по (10.7) и (10.10). После преобразования
получим следующую расчетную формулу:
![]() (10.11)
(10.11)
В
равенстве (10.11) величина
![]() представляет собой измеренную деформацию
на нижней поверхности стержня после
снятия слоя
представляет собой измеренную деформацию
на нижней поверхности стержня после
снятия слоя![]() .
Если при расчете по формуле (10.11) величина
.
Если при расчете по формуле (10.11) величина![]() оказывается положительной, то остаточные
напряжения - растягивающие.
оказывается положительной, то остаточные
напряжения - растягивающие.
Если требуется определить остаточные напряжения в поверхностном слое то в этом случае из формулы (10.11), полагая а=0, получим
![]()
Для слоев стержня, характеризующихся малыми значениями а остаточные напряжения в соответствии с формулой (10.11) окажутся равными
![]()
Как
и при использовании формулы (10.6), в
полученной зависимости (10.11) для
вычисления остаточных напряжений надо
знать не только величины
![]() (а),
но и
располагать значениями производной
(а),
но и
располагать значениями производной
![]() и интеграла
и интеграла![]() .
Эти величины определяются так, как
было указано выше.
.
Эти величины определяются так, как
было указано выше.
Метод
Давиденкова.Этот метод используется
в том случае, когда исследуемая заготовка
представляет собой тонкостенный
цилиндр. Тонкостенными принято считать
цилиндры, толщина стенки которых![]() мала по сравнению со средним радиусом
мала по сравнению со средним радиусом![]() ,
т.е. при
,
т.е. при![]()
В
общем случае элемент цилиндра находится
в трехосном напряженном состоянии
(рис.10.21). На данном рисунке и в дальнейшем
приняты обозначения:
![]() - окружное напряжение;
- окружное напряжение;![]() - осевое напряжение;
- осевое напряжение;![]() - радиальное напряжение.
- радиальное напряжение.
В еличина
еличина![]() для тонкостенных цилиндров мала по
сравнению с напряжениями
для тонкостенных цилиндров мала по
сравнению с напряжениями![]() и
и![]() и, таким образом, напряженное состояние
тонкостенного цилиндра является
плоским.
и, таким образом, напряженное состояние
тонкостенного цилиндра является
плоским.
Согласно методу Н. Н. Давиденкова, который был предложен в 1931 году, для определения остаточных напряжений вырезается достаточно длинный участок тонкостенного цилиндра, а затем производится его разрезка по образующей и последовательное снятие цилиндрических слоев. Снятие слоев металла производится травлением.
Окружное напряжение, существующее в некотором слое а после вырезки участка цилиндра, его разрезки и снятия предыдущих слоев определяется по соотношению
![]() (10.12)
(10.12)
где
![]() -
первоначальные наружные остаточные
напряжения;
-
первоначальные наружные остаточные
напряжения;
![]() -
окружные напряжения, снимаемые в
рассматриваемом слое при вырезке участка
тонкостенного цилиндра;
-
окружные напряжения, снимаемые в
рассматриваемом слое при вырезке участка
тонкостенного цилиндра;
![]() -
окружные напряжения, снимаемые в
рассматриваемом слое при разрезке
тонкостенного цилиндра по образующей;
-
окружные напряжения, снимаемые в
рассматриваемом слое при разрезке
тонкостенного цилиндра по образующей;
![]() -
окружные напряжения, снимаемые в
рассматриваемом слое при удалении всех
предыдущих слоев;
-
окружные напряжения, снимаемые в
рассматриваемом слое при удалении всех
предыдущих слоев;
![]() -
окружные напряжения в слое а
непосредственно перед его удалением.
-
окружные напряжения в слое а
непосредственно перед его удалением.
В ырезка
участка цилиндра эквивалентна приложению
в торцовых сечениях распределенных
моментов, создаваемых обратными осевыми
напряжениями. Дополнительные напряжения
(в том числе и окружные
ырезка
участка цилиндра эквивалентна приложению
в торцовых сечениях распределенных
моментов, создаваемых обратными осевыми
напряжениями. Дополнительные напряжения
(в том числе и окружные![]() ),
возникающие от этих распределенных
моментов, затухают по мере удаления от
торцов цилиндрической оболочки. Поэтому
их величинами при определении остаточных
напряжений пренебрегают.
),
возникающие от этих распределенных
моментов, затухают по мере удаления от
торцов цилиндрической оболочки. Поэтому
их величинами при определении остаточных
напряжений пренебрегают.
При
разрезке цилиндра вдоль образующей
(рис.10.22) величина момента
![]() ,
создаваемого окружными остаточными
напряжениями, связана с изменением
диаметра на величину
,
создаваемого окружными остаточными
напряжениями, связана с изменением
диаметра на величину![]() следующим соотношением
следующим соотношением
![]() .
(10.13)
.
(10.13)
П ри
известной величине моментаМ
можно записать соотношение для
дополнительных окружных напряжений
ри
известной величине моментаМ
можно записать соотношение для
дополнительных окружных напряжений
![]() ,
возникающих на расстоянии
,
возникающих на расстоянии![]() от наружной поверхности тонкостенного
цилиндра
от наружной поверхности тонкостенного
цилиндра![]() ,
гдес=h/2-a.
Тогда с
учетом (10.13) получим
,
гдес=h/2-a.
Тогда с
учетом (10.13) получим
![]()
Кроме
напряжений
![]() ,
в тонкостенном цилиндре возникают
также дополнительные осевые напряжения,
которые связаны с
,
в тонкостенном цилиндре возникают
также дополнительные осевые напряжения,
которые связаны с
![]() (а)соотношением
(а)соотношением
![]()
После
разрезки тонкостенного цилиндра
производится последовательное снятие
слоев. При снятии слоя
![]() (рисунок 10.23) к оставшейся части будут
приложены обратные напряжения
(рисунок 10.23) к оставшейся части будут
приложены обратные напряжения![]() и
и![]() ,
действовавшие в слое после разрезки
цилиндра. Осевые напряжения
,
действовавшие в слое после разрезки
цилиндра. Осевые напряжения![]() вызывают растяжение тонкостенного
цилиндра и при
вызывают растяжение тонкостенного
цилиндра и при![]() его поперечную деформацию. Изменением
диаметра вследствие указанной деформации
можно пренебречь, так как они малы по
сравнению с изгибными деформациями.
Поэтому без учета влияния осевых
напряжений на изменение диаметра
цилиндра дополнительное напряжение
при снятии слоя толщинойа
будет
определяться соотношением
его поперечную деформацию. Изменением
диаметра вследствие указанной деформации
можно пренебречь, так как они малы по
сравнению с изгибными деформациями.
Поэтому без учета влияния осевых
напряжений на изменение диаметра
цилиндра дополнительное напряжение
при снятии слоя толщинойа
будет
определяться соотношением
![]()
Напряжение в самом слое а после удаления всех предыдущих слоев может быть определено равенством
![]()
Теперь
найдем напряжение, существующее в слое
а
после вырезки участка тонкостенного
цилиндра, его разрезки и снятия предыдущих
слоев, учитывая, что
![]() ,
и подставляя в зависимость (10.12)
значения
,
и подставляя в зависимость (10.12)
значения![]()
![]() и
и![]()

(10.1 4)
где знак плюс принимается при снятии наружных слоев с тонкостенного цилиндра и знак минус - при снятии внутренних слоев. Полученная формула позволяет сразу определить величину окружных остаточных напряжений, не проводя исследования осевых напряжений.
После
интегрирования по величине
![]() (приращению диаметра цилиндра), равенство
(10.14) принимает следующий вид:
(приращению диаметра цилиндра), равенство
(10.14) принимает следующий вид:

(10.15)
В
этом равенстве величины
![]() и
и![]() рассматриваются как функции текущего
значения
рассматриваются как функции текущего
значения![]() .
.
Для определения осевых остаточных напряжений проводится вырезание полосок из тонкостенного цилиндра. Расчетная зависимость для осевых напряжений, согласно рассматриваемому методу, имеет вид:
 ,
,
(10.16)
Эта зависимость учитывает долю осевых напряжений, вызванных действием окружных (первое слагаемое). Часть уравнения в фигурных скобках соответствует зависимости (10.6), полученной в рассмотренном выше способе замера прогибов.
В этой зависимости знак плюс используется при снятии наружных слоев и минус - при снятии внутренних;
![]() -
прогиб полоски (наибольший) после вырезки
из цилиндра;
-
прогиб полоски (наибольший) после вырезки
из цилиндра;
![]() -дополнительный
прогиб полоски при снятия слоя толщиной
а;
-дополнительный
прогиб полоски при снятия слоя толщиной
а;
l - длина полоски или расстояние между двумя точками на оси полоски, относительно которых определяется прогиб.
Как видно из (10.16), при определении осевых остаточных напряжений должны быть заранее известны остаточные напряжения в окружном направлении.
Если предположить, что распределение остаточных напряжений по толщине трубы близко к линейному, то можно ограничиться в полученных выше соотношениях (10.15) и (10.16) лишь первыми членами. Тогда приближенные формулы будут иметь вид.
![]()
![]()
Если требуется определить остаточные напряжения только в поверхностных слоях, то в полученных расчетных зависимостях (10.15), (10.16) следует сохранить только первых два члена. Тогда
![]()

![]()
Метод Закса. Во многих случаях при определении остаточных напряжений могут рассматриваться полые или сплошные цилиндрические детали. Основная особенность цилиндрических деталей состоит в том, что, кроме окружных и радиальных остаточных напряжений, в них могут существовать осевые остаточные напряжения, которые определяются при действии осевой силы N по формуле
![]() (10.17)
(10.17)
В
том случае, когда
![]() представляет собой равнодействующую
неравномерно распределенных по
поперечному сечению напряжений, равенство
(2.17) оказывается справедливым на некотором
удалении от торцов, т.е. в условиях
плоской деформации.
представляет собой равнодействующую
неравномерно распределенных по
поперечному сечению напряжений, равенство
(2.17) оказывается справедливым на некотором
удалении от торцов, т.е. в условиях
плоской деформации.
Для определения остаточных напряжений по методу Закса из детали вырезается цилиндрический образец и производится его сверление.
В
результате вырезки осевые напряжения
![]() на торцах цилиндра обращаются в нуль,
но на некотором расстоянии
на торцах цилиндра обращаются в нуль,
но на некотором расстоянии![]() ,
согласно известному принципу Сен-Венана,
они сохраняют прежнее значение. При
исследовании остаточных напряжений
обычно принимаютlk
= r,
где r
– наружный
радиус образца.
,
согласно известному принципу Сен-Венана,
они сохраняют прежнее значение. При
исследовании остаточных напряжений
обычно принимаютlk
= r,
где r
– наружный
радиус образца.
В
пределах концевых участков образца на
цилиндрических поверхностях действуют
касательные напряжения, параллельные
оси цилиндра. Если рассмотреть часть
цилиндра с внутренним радиусом R1
и наружным радиусом
![]() (рис.10.24), то из условия его равновесия
вытекает, что касательные напряжения,
параллельные оси цилиндра, дают
равнодействующую - осевую силу, которую
можно определить через напряжение σz
(рис.10.24), то из условия его равновесия
вытекает, что касательные напряжения,
параллельные оси цилиндра, дают
равнодействующую - осевую силу, которую
можно определить через напряжение σz
 (10.18)
(10.18)
После сверления, в соответствии с методом Закса, производится последовательная расточка цилиндра с измерением окружной и осевой деформаций на внешнем радиусе. Для этого делаются замеры изменения наружного диаметра и базовой длины. Чаще всего измерение деформаций производится с использованием тензорезисторов.
П усть,
например, (рис. 10.24) проведена расточка
цилиндра до радиуса
усть,
например, (рис. 10.24) проведена расточка
цилиндра до радиуса![]() .
Это эквивалентно приложению к обработанной
поверхности обратных остаточных
напряжений. В результате этого в цилиндре
возникнут дополнительные напря-жения
и деформации. Дополнительное окруж-ное
напряжение в наружном слое радиусаR2
при действии напряжений на внутрен-ней
поверхности радиуса
.
Это эквивалентно приложению к обработанной
поверхности обратных остаточных
напряжений. В результате этого в цилиндре
возникнут дополнительные напря-жения
и деформации. Дополнительное окруж-ное
напряжение в наружном слое радиусаR2
при действии напряжений на внутрен-ней
поверхности радиуса
![]() может быть найдено в соответствии с
теорией тонкостенных цилиндров по
формуле
может быть найдено в соответствии с
теорией тонкостенных цилиндров по
формуле
![]() (10.19)
(10.19)
Дополнительное радиальное напряжение, будет равным нулю, т.е.
![]() (10.20)
(10.20)
Величину дополнительного осевого напряжения можно найти в соответствии с формулами (10.17) и (10.18).
 (10.21)
(10.21)
где r1 - текущий радиус, изменяющийся от R1 (радиуса исходного отверстия) до r (радиуса выполненной расточки).
Дополнительные деформации возникшие в результате расточки, определяются в соответствии с законом Гука следующими равенствами:
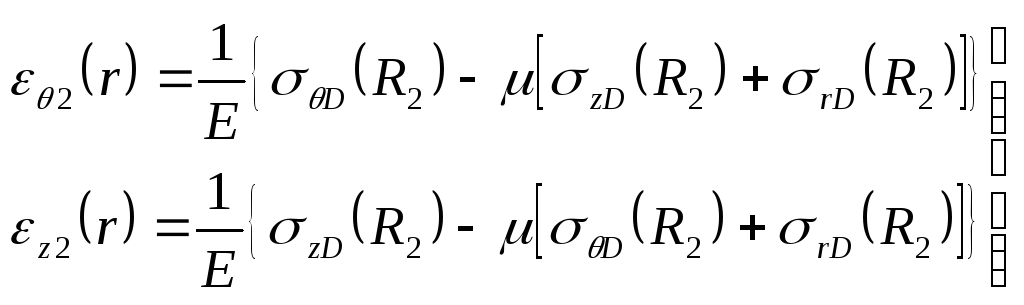 (10.22)
(10.22)
В
этих равенствах
![]() и
и![]() - деформации в окружном и осевом
направлениях на внешнем радиусе,
возникшие в результате расточки
отверстия до радиуса
- деформации в окружном и осевом
направлениях на внешнем радиусе,
возникшие в результате расточки
отверстия до радиуса![]() .
Учитывая, что дополнительные радиальные
напряжения (последние слагаемые в
формулах) равны нулю, получим из
соотношений (10.22) следующие формулы
.
Учитывая, что дополнительные радиальные
напряжения (последние слагаемые в
формулах) равны нулю, получим из
соотношений (10.22) следующие формулы
![]() (10.23)
(10.23)
![]() (10.24)
(10.24)
Подставляя в полученные соотношения формулы (10.19) и (10.21), найдем
![]() (10.25)
(10.25)

После
дифференцирования последнего равенства
по
![]() ,
получим
,
получим
 (10.26)
(10.26)
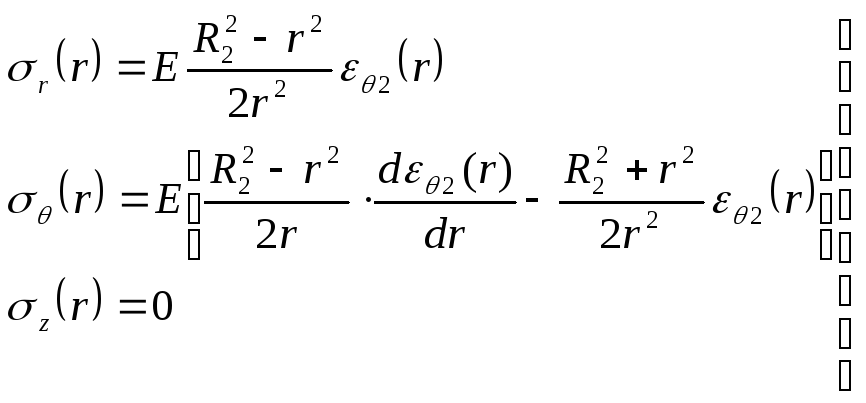
Окружное остаточное напряжение может быть определено из условия равновесия цилиндрического образца
![]()
что дает
 (10.27)
(10.27)
Формулы (10.25), (10.26) и (10.27) справедливы и для полых, и для сплошных цилиндров.
Если
длина цилиндра мала и дополнительные
осевые напряжения отсутствуют (случай
диска), то из условия (10.24) при
![]() находим
находим![]() Подставив это значение в равенства
(10.25), (10.26) и (10.27), получим
Подставив это значение в равенства
(10.25), (10.26) и (10.27), получим
При определении остаточных напряжений по формулам (10.25) - (10.27) для дисков, эти напряжения определяются в слоях, которые были удалены расточкой. Если требуется найти остаточные напряжения во внешних слоях, то необходимо вести обточку наружной поверхности и измерять деформации на внутренней поверхности. Расчетные формулы при измерении деформаций на внутренней поверхности получим аналогично предыдущему.
Дополнительные напряжения на внутренней поверхности цилиндрического образца будут определяться соотношениями, подобными (10.19) - (10.21), т.е.

Также используя равенства, аналогичные (10.23) и (10.24), т.е.
получим следующие расчетные формулы при обточке образца и измерении деформации на внутренней поверхности:
![]() (10.28)
(10.28)
 (10.29)
(10.29)
Также из уравнения равновесия цилиндрического образца находим окружное остаточное напряжение
 (10.30)
(10.30)
Формулы
(10.28) - (10.30) служат для расчета остаточных
напряжений в наружных слоях полого
цилиндра. Если же определяются остаточные
напряжения в сплошном цилиндре
![]() ,
то измерения на внутреннем радиусе
невозможны, а поэтому предварительно
производится расточка цилиндрического
образца.
,
то измерения на внутреннем радиусе
невозможны, а поэтому предварительно
производится расточка цилиндрического
образца.
М етод
освобождения.
Выше были
рассмотрены методы определения
остаточных напряжений в деталях простой
геометрической формы. Теперь рассмотрим
способы позволяющие определить остаточные
напряжения в поверхностном слое деталей
сложной конфигурации при помощи
проволочных тензорезисторов.
етод
освобождения.
Выше были
рассмотрены методы определения
остаточных напряжений в деталях простой
геометрической формы. Теперь рассмотрим
способы позволяющие определить остаточные
напряжения в поверхностном слое деталей
сложной конфигурации при помощи
проволочных тензорезисторов.
Сущность
способа состоит в следующем. Если в
некоторой точке детали сложной
конфигурации наклеить два проволочных
тензорезистора в двух взаимно
перпендикулярных направлениях 1 и 2
(рис.10.25) и записать их показания, а
затем вырезать вместе с тензорезисторами
пластинку толщиной
![]() (не внося дополнительных остаточных
напряжений) и снова снять показания
тензорезисторов, то разность показаний
позволит вычислить деформации
(не внося дополнительных остаточных
напряжений) и снова снять показания
тензорезисторов, то разность показаний
позволит вычислить деформации![]() и
и![]() в направлениях 1 и 2, возникшие в результате
вырезки пластинки.
в направлениях 1 и 2, возникшие в результате
вырезки пластинки.
Так как после вырезки остаточные напряжения в пластинке отсутствуют, т.е. происходит освобождение пластинки от действия остаточных напряжений, то по значениям 1 и 2 можно вычислить остаточные напряжения, действовавшие вдоль направлений 1 и 2 до вырезки пластинки. Согласно закону Гука,
![]() (10.31)
(10.31)
![]() (10.32)
(10.32)
При
использовании расчетных зависимостей
(10.31) и (10.32) предполагается, что напряжения
![]() и
и![]() распределены равномерно по толщинеh
вырезанной пластинки, а потому результаты
определения этим методом
распределены равномерно по толщинеh
вырезанной пластинки, а потому результаты
определения этим методом
![]() и
и![]() тем точнее, чем тоньше пластинка.
тем точнее, чем тоньше пластинка.
В тонкостенных деталях чаще всего имеет место равномерное распределение остаточных напряжений по толщине. В этом случае для определения остаточных напряжений производится высверливание с помощью трубчатого сверла шайбы с наклеенными тензорезисторами.
Формулы
(10.31) и (10.32) определяют нормальные
остаточные напряжения в двух произвольных
взаимно перпендикулярных направлениях.
Для определения величины и направления
главных напряжений требуется замерить
деформации в трех направлениях. Для
этого на исследуемую поверхность
наклеиваются розетки проволочных
тензорезисторов (как на рис. 10.25) в трех
направлениях 1, 2 и 3, составляющих друг
с другом углы в 450
или 600
. Если обозначить измеренные тензорезисторами
деформации, возникшие в результате
вырезки пластинки в направлениях 1, 2 и
3, соответственно
![]() ,
,![]() и
и![]() ,
то для главных остаточных напряжений
,
то для главных остаточных напряжений![]() и
и![]() можно получить следующие формулы.
можно получить следующие формулы.
Для случая использования розетки тензорезисторов с углами 450 между направлениями 1, 2 и 3:
![]()
![]()
Угол
![]() между главным направлением
между главным направлением![]() и направлением тензорезистора 1
определяется из соотношения
и направлением тензорезистора 1
определяется из соотношения
![]()
При использовании розетки тензорезисторов с углами 600 между направлениями 1, 2 и 3:

![]()
![]()
При известных величинах и направлениях главных напряжений можно определить нормальные и касательные напряжения в произвольных площадках, используя известные из теории напряженного состояния зависимости.
Рентгеновский метод определения остаточных напряжений основан на явлении рассеяния монохроматических рентгеновских лучей при прохождении через регулярную кристаллическую решетку материала. При таком рассеянии происходит интерференция лучей, в результате интенсивность лучей увеличивается только в определенных направлениях, тогда как в других направлениях – ослабляется. Для материалов некристаллической структуры (стекло, пластмасса) рентгеновский метод не применим.
В основе рентгеновского метода определения остаточных напряжений лежит формула Вульфа – Брэгга, характеризующая условие «отражения» рентгеновских лучей от атомных плоскостей кристалла:
2 d sin = n, (10.33)
где d – расстояние между двумя соседними параллельными атомными плоскостями кристаллической решетки исследуемого материала; – угол падения пучка лучей на плоскость кристаллической решетки материала; п – целое число (порядок отражения); – длина волны рентгеновского излучения.
Рентгеновские лучи, не удовлетворяющие условию (10.33), взаимно погашаются. Зная угол между падающим и отраженным рентгеновскими лучами, из уравнения (5.21) можно вычислить расстояние d при напряженном состоянии металла. Если известно расстояние между кристаллографическими плоскостями d, то деформация кристаллической решетки
= (d – d0)/d0,
где d0 – расстояние между кристаллографическими плоскостями при отсутствии напряжений.
При определенных упругих постоянных материала деформацию его кристаллической решетки можно отождествить с обычной (макроскопической) деформацией. Значение d0 определяют с помощью образца, изготовленного из того же материала, что и деталь, в которой изучают остаточные напряжения, но подвергнутого термообработке (отжигу) для снятия остаточных напряжений.

Одна из возможных схем для определения значения d показана на рис.10.26. Монохроматический рентгеновский луч направляется узким пучком на исследуемую поверхность, а отраженные лучи фиксируются на рентгеновской пленке в виде затемненного кольцевого следа. Как следует из рисунка,
tg = tg(1800 – 2) = tg(2) = R/l,
где l – расстояние от поверхности исследуемого тела до рентгеновской пленки.
Вычислив , с помощью соотношения (10.33) можно найти d. Значение R определяют по рентгенограмме.
Подробно методика определения остаточных напряжений с помощью рентгеновского метода описана в специальных работах.
Достоинством рентгеновского метода является то, что он позволяет достоверно оценить остаточные напряжения II и III рода в поверхностном слое детали без ее разрушения. Но при определении остаточных напряжений I рода точность метода невысока. Это объясняется тем, что в отражении рентгеновских лучей участвуют только кристаллы, плоскости которых имеют Брэггов угол с направлением падающих лучей. Лучи, проникая в металл на глубину 3...50 мкм, дают на рентгенограммах или дифрактограммах осредненные по этой глубине значения остаточных напряжений. Для уточнения характера распределения остаточных напряжений на различной глубине необходимо выполнить последовательное травление поверхности детали или образца со снятием рентгенограммы после каждого травления.
Поляризационно-оптический метод (метод фотоупругости) это экспериментальный метод определения напряженного состояния деталей и конструкций на прозрачных моделях из оптически чувствительных материалов. Он основан на явлении поляризации света и свойстве большинства прозрачных изотропных материалов приобретать под действием нагрузки способность двойного лучепреломления. Поляризованным является свет, в котором направления колебаний световых волн упорядочены. Двойное лучепреломление заключается в том, что при прохождении света через прозрачное кристаллическое тело световая волна разлагается на две взаимно перпендикулярные волны, распространяющиеся внутри кристалла с различными скоростями. Материалы, обладающие таким свойством, называются оптически чувствительными. В изотропных материалах оптическая чувствительность проявляется лишь при их нагружении (стекло, оргстекло, целлулоид, некоторые эпоксидные смолы и др.). Если нагрузку снять, эффект двойного лучепреломления исчезает.
Многочисленными исследованиями установлено, что плоскости колебаний преломленных лучей совпадают с плоскостями главных напряжений. Если лучи света падают перпендикулярно к поверхности пластинки, находящейся в плоском напряженном состоянии, плоскости колебаний преломленных лучей совпадают с направлениями главных напряжений 1 и 2. При выходе из пластины (модели) эти два луча на пути t, равном толщине пластинки, получают разность фаз, или линейную разность хода .
Закон Вертгейма устанавливает количественную связь между оптическим эффектом и разностью главных напряжений:
= c t (1 - 2).
Коэффициент с зависит от физических свойств материала и длины волны падающих световых лучей. Линейную разность хода преломленных лучей и направления главных напряжений 1 и 2 определяют при просвечивании плоской модели в полярископе.
 Различают
плоские и круговые полярископы.Плоский
полярископ состоит из источника света,
поляризатора,
анализатора и экрана. Исследуемая модель
устанавливается
в рабочем поле полярископа между
поляризатором
и анализатором. Поляризатор служит для
поляризации
света, идущего от источника. Анализатор,
который
аналогично поляризатору пропускает
световые колебания
только в одной плоскости, служит для
получения интерференционной
картины при совмещении в одной плоскости
двух световых волн, выходящих из модели,
со сдвигом фаз колебаний.
Различают
плоские и круговые полярископы.Плоский
полярископ состоит из источника света,
поляризатора,
анализатора и экрана. Исследуемая модель
устанавливается
в рабочем поле полярископа между
поляризатором
и анализатором. Поляризатор служит для
поляризации
света, идущего от источника. Анализатор,
который
аналогично поляризатору пропускает
световые колебания
только в одной плоскости, служит для
получения интерференционной
картины при совмещении в одной плоскости
двух световых волн, выходящих из модели,
со сдвигом фаз колебаний.
Если в плоском полярископе за поляризатором и перед ним установить специальные пластинки, создающие сдвиг фаз колебаний световых волн на четверть длины волны, то получится круговой полярископ, в рабочем поле которого имеет место круговая поляризация света (рис.10.27). Полярископ дает интерференционную картину в виде черно-белых (при источнике монохроматического света) или цветных (при источнике белого света) полос.
Поляризационно-оптический метод является наиболее совершенным и универсальным из методов моделирования напряженного состояния деталей и конструкций. Моделирование не противопоставляется расчету – оба эти способа взаимно дополняются. Теория моделирования решает вопросы, связанные с выбором вида и параметров модели и с переходом от величин, определяемых на модели, к величинам на натуре. Теоретической основой моделирования является теория подобия, устанавливающая критерии подобия – условия тождественного протекания процессов в модели и реальной конструкции.
Основная задача моделирования при использовании поляризационно-оптического метода – установление областей подобия, закономерностей распределения полей напряжений и деформаций в оптически чувствительных и конструкционных материалах. При решении прочностных задач в случае двухмерной модели используют соотношения:
![]()
![]()
где , L, d, F, u, E – соответственно напряжение, линейный размер, толщина, внешняя нагрузка, перемещение и модуль упругости материала (индексом «м» обозначены величины, относящиеся к модели, индексом «н» - к натурному образцу).
Указанные соотношения справедливы для однородного изотропного материала в пределах области упругих деформаций и при отсутствии в модели отверстий, нагруженных по контуру.
Поляризационно-оптический метод применяется также для исследования объемного напряженного состояния тел, однако эта задача в случае объемного напряженного состояния весьма сложная. Для нахождения напряжений в какой-либо внутренней области объемной модели необходимо выделить эту область так, чтобы по пути прохождения светового луча напряженное состояние в ней практически не менялось, т. е. было плоским. При решении подобных задач чаще всего используется способ, основанный на использовании свойства оптически чувствительных материалов моделей фиксировать («замораживать») оптический эффект при охлаждении от температур высокоэластичного до температур стеклообразного состояния при сохранении нагрузки. Порядок проведения такого эксперимента следующий: 1) модель помещают в термостат и нагружают заданной системой внешних сил; 2) нагревают модель выше температуры перехода материала в высокоэластичное состояние; 3) выдерживают модель при заданной температуре и медленно охлаждают до комнатной температуры; 4) снимают внешнюю нагрузку и разрезают модель на тонкие срезы (темплеты) толщиной 1...3 мм. Напряжения в плоскости среза определяют измерением оптических величин, как и при исследовании плоских нагруженных моделей. В общем случае для отыскания всех компонентов тензора напряжений в точке необходимо иметь три системы взаимно перпендикулярных срезов, получаемых из трех идентичных «замороженных» моделей.
Оптические методы исследования напряженного состояния тел широко используются для решения различных задач, в том числе в процессе резания металлов, при анализе характера распределения напряжений и коэффициента их концентрации при обработке деталей сложных форм.
Эффективно применение поляризационно-оптического метода при изучении напряжений в зубчатых колесах. При этом используются плоские модели отдельных зубьев и колес в целом, нагружаемые специальными устройствами, и другие методы.
 Разновидностью
поляризационно-оптического методаявляется
метод
оптически чувствительных (фотоупругих)
покрытий (ОЧП).
На поверхность
исследуемого элемента наносят тонкий
равномерный слой оптически активного
материала.
Модуль упругости его существенно
отличается от модуля
упругости материала исследуемой детали,
вследствие чего
материал покрытия работает в упругой
области даже тогда,
когда материал объекта находится в
пластическом состоянии.
Применяя основные закономерности
явлений, используемых
в поляризационно-оптическом методе,
можно в
любой точке поверхности деформируемого
тела определить
составляющие тензора деформаций.
Деформации поверхности
тела передаются покрытию и в нем возникает
эффект
искусственного двойного лучепреломления.
Для замеров
разности хода преломленных лучей и
определения направлений
главных деформаций применяются установки
для
работы в отраженном свете (рис.10.28). Луч
от источника
света через поляризатор и далее через
фотоупругое покрытие
попадает на поверхность элемента.
Отраженный от
поверхности луч снова проходит через
покрытие, поступает
в анализатор и затем падает на экран.
По данным просвечивания
определяются разности главных деформаций
(напряжений) и их направления на
поверхности исследуемого
элемента.
Фотоупругие покрытия дают возможность
проводить измерения
в заводских и эксплуатационных условиях,
в жидких,
химически агрессивных и взрывоопасных
средах.
Разновидностью
поляризационно-оптического методаявляется
метод
оптически чувствительных (фотоупругих)
покрытий (ОЧП).
На поверхность
исследуемого элемента наносят тонкий
равномерный слой оптически активного
материала.
Модуль упругости его существенно
отличается от модуля
упругости материала исследуемой детали,
вследствие чего
материал покрытия работает в упругой
области даже тогда,
когда материал объекта находится в
пластическом состоянии.
Применяя основные закономерности
явлений, используемых
в поляризационно-оптическом методе,
можно в
любой точке поверхности деформируемого
тела определить
составляющие тензора деформаций.
Деформации поверхности
тела передаются покрытию и в нем возникает
эффект
искусственного двойного лучепреломления.
Для замеров
разности хода преломленных лучей и
определения направлений
главных деформаций применяются установки
для
работы в отраженном свете (рис.10.28). Луч
от источника
света через поляризатор и далее через
фотоупругое покрытие
попадает на поверхность элемента.
Отраженный от
поверхности луч снова проходит через
покрытие, поступает
в анализатор и затем падает на экран.
По данным просвечивания
определяются разности главных деформаций
(напряжений) и их направления на
поверхности исследуемого
элемента.
Фотоупругие покрытия дают возможность
проводить измерения
в заводских и эксплуатационных условиях,
в жидких,
химически агрессивных и взрывоопасных
средах.
 Метод
голографической интерферометрии.
Голография – это двухступенчатый
метод записи и восстановления волнового
фронта,
несущего информацию о предмете. Запись
волнового
фронта основана на явлении интерференции
двух когерентных
пучков света – предметного и опорного,
первый из
которых освещает предмет и рассеивается
им, а второй создает
когерентный фон. Если предметная и
опорная волны
обладают когерентностью, то разность
фаз между ними остается
постоянной во времени, и создается
стационарная интенференционная
картина с определенным распределением
интенсивностей освещенности.
Фотографическую запись
этой картины называют голограм-мой.
Принципиальная схема получения
голограммы показана
на рис.10.29. Основное отличие голограммы
от объемной
фотографии состоит в том, что в ней
регистрируется информация
об амплитуде и фазе предметной волны
света, тогда
как в фотографии регистрируется лишь
распределение
освещенности. На голограмме полностью
отсутствуют элементы, сколько-нибудь
напоминающие очертания оригинала. При
рассматривании голограммы в микроскоп
в простейшем
случае можно увидеть лишь систему темных
и светлых
полос. Для получения изображения предмета
голограмму
просвечивают, словно диапозитив, только
одним опорным пучком света.
Метод
голографической интерферометрии.
Голография – это двухступенчатый
метод записи и восстановления волнового
фронта,
несущего информацию о предмете. Запись
волнового
фронта основана на явлении интерференции
двух когерентных
пучков света – предметного и опорного,
первый из
которых освещает предмет и рассеивается
им, а второй создает
когерентный фон. Если предметная и
опорная волны
обладают когерентностью, то разность
фаз между ними остается
постоянной во времени, и создается
стационарная интенференционная
картина с определенным распределением
интенсивностей освещенности.
Фотографическую запись
этой картины называют голограм-мой.
Принципиальная схема получения
голограммы показана
на рис.10.29. Основное отличие голограммы
от объемной
фотографии состоит в том, что в ней
регистрируется информация
об амплитуде и фазе предметной волны
света, тогда
как в фотографии регистрируется лишь
распределение
освещенности. На голограмме полностью
отсутствуют элементы, сколько-нибудь
напоминающие очертания оригинала. При
рассматривании голограммы в микроскоп
в простейшем
случае можно увидеть лишь систему темных
и светлых
полос. Для получения изображения предмета
голограмму
просвечивают, словно диапозитив, только
одним опорным пучком света.
Для лучшего усвоения принципа голографической интерферометрии предположим, что голограмма после экспонирования и проявления установлена точно в то же место, где она находилась в момент регистрации. Если теперь, не убирая объекта, осветить голограмму опорным пучком световых лучей, за нею будут одновременно распространяться две волны: рассеянная непосредственно объектом и восстановленная голограммой (копия той волны, которая рассеивалась объектом во время экспонирования голограммы). Эти волны когерентны и могут интерферировать. Зарегистрированная на фотопластинке или фотопленке интерференционная картина называется голографической интерферограммой.
Если происходят какие-либо изменения объекта (например, деформация), обусловливающие фазовые искажения рассеянной им волны, это сказывается на виде наблюдаемой картины (появятся интерференционные полосы). Поскольку при этом интерференционную картину наблюдают одновременно с изменениями, происходящими с объектом, метод голографической интерферометрии называют также методом реального времени.
В другом варианте рассматриваемого метода на одной фотопластинке последовательно регистрируются две голограммы, соответствующие двум состояниям одного и того же объекта. Одновременно восстанавливаясь, две волны, являющиеся голографическими копиями волн, полученных в разное время, интерферируют. Этот вариант метода голографической интерферометрии называется методом двух экспозиций.
Поляризационно-оптический метод в традиционном виде позволяет достаточно точно определить разность и направления действия главных напряжений. Что касается раздельного определения главных напряжений, то, несмотря на обилие различных методов решения задачи, оно остается наиболее трудоемким и наименее точным. Один из этих методов – разделение напряжении при помощи картин изопахик (линий равных сумм главных напряжений) – весьма прост. Однако получение этих картин связано со значительными трудностями. Голографическая интерферометрия позволяет достаточно легко построить такую картину. В отдельных случаях голографический интерферометр используется непосредственно для измерения абсолютных разностей хода лучей 1 и 2 по направлениям 1 и 2 в нагруженной и ненагруженной моделях. Это избавляет от необходимости дополнительной регистрации смещений или суммы главных напряжений. Поскольку природа и способ измерения величин 1 и 2 одинаковы, то результаты разделения напряжений более достоверны, а точность их выше, чем при других способах.
В основе акустических методов определения напряжений лежат нелинейные акустические эффекты, возникающие в деформированном теле при распространении и взаимодействии в нем звуковых волн. Одной из основных причин возникновения таких эффектов являются нелинейные свойства деформированного твердого тела. В частности, скорость поляризованных звуковых волн, распространяющихся в твердом теле, зависит от уровня напряжений, действующих в нем, направления колебаний частиц (поляризации) и направления распространения волны. Данное явление, называемое акустоупругостью, положено в основу рассматриваемого метода анализа напряжений в деталях машин.
Для возбуждения упругих волн обычно используются ультразвуковые излучатели, так как ультразвуковые волны обладают высокой проникающей способностью, практически не зависящей от агрегатного состояния исследуемых материалов.
Существует много методов измерения скорости ультразвуковых волн. При измерениях время распространения ультразвуковой волны в исследуемой среде сравнивается со временем ее распространения в некоторой эталонной среде. При решении практических задач с помощью акустической тензометрии относительная погрешность измерений не превышает 3*10-4 .
При изучении ультразвуковым методом неоднородных полей напряжений получают усредненные напряжения на базе, которая определяется размерами измерительных датчиков. Если напряжения изменяются по толщине образцов, получают их усредненные значения.
Рассматриваемый метод является неразрушающим, позволяет измерять остаточные напряжения как на поверхности, так и внутри тела, обеспечивает оперативность контроля, достаточно высокую разрешающую способность и точность. Однако этот метод имеет и недостатки: сложность проведения эксперимента, использование комплекса сложной аппаратуры, ограниченность реализации метода в условиях производства и эксплуатации.