

sr004
.pdfìx = r cos j ;
í
î y = r sin j.
u = u(r;j; t |
, (34) |
: |
|
u(r0 ;j ; t = 0 . |
(35) |
,
u¢¢ |
+u¢¢ |
= |
1 |
(ru¢ |
)¢ |
+ |
1 |
u¢¢2 |
. |
|
r |
r 2 |
|||||||||
xx |
yy |
|
r |
r |
|
ϕ |
,
:
¢¢ |
|
2 |
æ |
1 |
¢ |
¢ |
1 |
|
¢¢ |
ö |
|
|
|
|
- a |
|
ç |
|
) + |
|
u |
÷ |
= 0 |
|
|
||||
utt |
|
r |
(rur |
r 2 |
|
2 |
. |
(36) |
||||||
|
|
|
è |
|
r |
ϕ |
|
ø |
|
|||||
, .
(36),
(35) :
u = R(r )F j( T) t . |
(37) |
u (10) (36), :
|
|
|
T ¢¢ |
é |
¢ |
1 |
ù |
|
|
|
||||||
|
|
|
- a2 ê |
(rR¢ )+ |
|
|
F¢¢ |
ú = 0 |
. |
|
|
|||||
|
|
|
T |
r 2 |
|
|
|
|
||||||||
|
|
|
ê |
rR |
|
|
|
F ú |
|
|
||||||
|
|
|
|
ë |
|
|
|
û |
|
|
|
|||||
, : |
|
|||||||||||||||
|
T ¢¢ |
= -a2n 2 , |
(rR¢ ¢)+ |
|
1 |
|
|
|
F¢¢ |
= -n 2 |
, |
(38) |
||||
|
|
2 |
|
|
|
|||||||||||
|
T |
|
rR |
|
r |
|
|
|
F |
|
|
|
||||
n 2 - . (38)
:
T (t ) = A cosn at + B sinn at ,
. (38)
|
F¢¢ |
é |
(rR¢ |
¢ |
|
ù |
|
|
= -r 2 ê |
) |
+n 2 ú |
, |
|||
|
F |
rR |
|
|
|||
|
ê |
|
|
ú |
|||
, |
ë |
|
|
|
û |
|
|
|
|
|
|
|
|
||
F¢¢ = , - r 2 éê(rR¢ ¢)
Fê rR
ë
ù
+n 2 ú = c .
ú
û
c , F(j
2p - . ,
= -k 2 , k = 0, 1, 2,.... .
F(j = 1 cos kj + C2 sin kj ,
1 , C2 - .
R(r
é |
(rR¢ |
¢ |
|
ù |
|
- r 2 ê |
) |
+n 2 ú = -k 2 |
, |
||
rR |
|
|
|||
ê |
|
|
ú |
||
ë |
|
|
|
û |
|
|
¢¢ |
|
1 |
|
¢ |
|
æ |
|
k |
2 |
ö |
|
R |
+ |
R |
|
ç 2 |
- |
|
÷ |
(39) |
||||
|
|
|
2 |
|||||||||
|
r |
|
+ çn |
r |
÷R = 0 |
|||||||
|
|
|
|
|
|
è |
|
|
ø |
|
||
(39) (35), . |
|
|||||||||||
|
|
|
R(r0 |
= 0 |
|
|
|
|
|
|||
, , R(r ) . |
|
|||||||||||
|
|
|
R(r0 |
)= J k n r( , |
|
|||||||
J m (x )- .
(39) Nk (n r ,
r = 0 .
k ,
R(r0 )= J k n r(0 = 0 .
, k r0 J k (x )
n = |
mn(k ) |
, J k (mn(k ) =)0, n = 1, 2, 3,...., k = 0,1, 2,.... |
|
r0 |
|||
|
|
,
æ |
(k ) |
|
ç |
mn |
|
r |
||
R(r0 )= J k ç |
||
è |
0 |
ö
r ÷, n =1, 2, 3,...., k = 0,1, 2,.....
÷
ø
(37),
:
un,k (r;j ; t =) |
æ |
ç |
|
ç A cos |
|
|
è |
´ ( 1 cos kj + C2 sin
(k ) |
|
(k ) |
ö |
||
mn |
at |
+ B sin |
mn |
at |
÷ |
|
|
|
|
÷´ |
|
r0 |
|
r0 |
|
||
|
|
|
ø |
||
æ m(k ) |
ö |
|
||
ç |
n |
÷ |
(40) |
|
r |
||||
kj)Jk ç |
r ÷ |
|||
è |
0 |
ø |
|
|
5. .
.
l . ,
.
0 |
x |
x + |
x |
l |
|
4.
,
x= 0 , – x = l . u(x; t ) −
x t .
,
∂u
q = −k ∂x S , S − ,
k− .
,
x |
x + |
x . |
|
, |
|
||||||||||
x |
t |
|
|
|
|
||||||||||
|
|
Q1 |
= −k |
|
∂u(x; t |
|
S t , |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
∂x |
|
|
|
|
|
|
|
|
|
x + |
x |
t : |
|
||||||||||||
|
|
Q2 |
= −k |
|
∂u(x + x; t |
S t . |
|
|
|||||||
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
∂x |
|
|
|
|
|
|||
|
Q1 − |
Q2 t o( x) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|||||||
Q1 − |
Q2 |
= k |
∂2u(x; t |
S x |
t . |
|
(41) |
||||||||
|
|
∂x2 |
|
|
|
|
|||||||||
|
|
|
|
t |
|
||||||||||
u |
|
∂u |
|
|
|||||||||||
Q |
− |
Q |
= cρ S x u = cρ S x |
t + o( t ) |
(42) |
||||||||||
|
|||||||||||||||
1 |
|
2 |
|
|
|
|
|
|
|
|
|
∂t |
, |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
c − , ρ − .
(41) (42), :
k |
∂ 2u(x; t |
S x t = cρ S x |
∂u |
t , |
|
∂x |
2 |
∂t |
|||
|
|
|
|
||

∂ |
|
2 |
∂ 2 |
u |
( |
x; t |
|
k |
|
|
|
||
u |
|
|
|
|
|
|
|
||||||
|
= a |
|
|
|
|
|
|
, a = |
|
. |
(43) |
||
∂t |
|
|
∂x |
2 |
cr |
||||||||
|
|
|
|
|
|
|
|
|
|||||
).
, u(x; t ) ,
.
:
u(x;0) = ϕ(x)− ,
x t = 0 ;
u(0; t ) = ψ 1 (t ), u(l; t ) = ψ 2 (t ) − , ,
,
ψ 1 (t ) ψ 2 (t ).
.
x .
. :
(43) x R t > 0 ,
u(x;0 |
)= j x ( |
|
|
|
|
|
|
(44) |
|||||||
, |
|||||||||||||||
. 2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u(x; t |
)= X |
x (×T) t . |
|
|
|
(45) |
|||||||||
(45) (43), : |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
′ |
|
′′ |
|
|||
|
¢ |
|
|
2 |
|
|
¢¢ |
|
T (t ) |
|
= |
X (x ) |
= −λ2 |
||
|
|
|
|
|
|
|
|
|
|
||||||
X (x )×T |
t( |
=) a |
X |
x ×T( t) a2T (t ) |
X (x ) |
||||||||||
|
|
|
|
. |
|||||||||||
¢ |
2 |
l |
2 |
×T t = 0 , |
¢¢ |
2 |
X x |
= 0 . |
(46) |
T |
(t )+ a |
|
X (x )+ l |
|
|||||
(46), : |
|
|
|
|
|
||||
T = e−a2λ2t , X = A cos λx + B sin λx . |
|
|
|||||||
(45). |
|
|
|
|
|
||||
|
uλ (x; t ) = e− a2λ2t (A(l)cos lx + B(l)sin lx) |
(47) |
|||||||
A B λ
. (47) .
∞ |
|
u(x; t )= òe−a2λ2t A (l cos( l)x + B l sin lx()dl) |
(48) |
0 |
|
A(l B(l , , t ,
x
t x .
A(l B(l , u(x; t (44).
|
|
|
∞ |
|
|
|
|
|
|
|
|
u(x;0 )= j x (=)ò |
A (l cos( |
l)x + B l sin lx()dl) . |
|
|
(49) |
||||||
|
|
|
0 |
|
|
|
|
|
|
|
|
j(x |
|
|
|
||||||||
|
|
∞ é |
∞ |
|
ö |
|
æ |
∞ |
ö |
ù |
|
|
1 |
æ |
òj(x )cos lx dx |
|
òj(x )sin lx dx |
|
|
||||
ç |
÷ |
|
ç |
÷ |
|
|
|||||
j(x) = p |
|
|
(50) |
||||||||
òêç |
÷ cos lx + |
ç |
÷sin lxúdl |
||||||||
|
|
ê |
|
|
ø |
|
è−∞ |
ø |
ú |
|
|
|
|
0 ëè −∞ |
|
|
û |
|
|||||
(49) (50):
|
1 |
∞ |
|
|
|
|
|
|
1 |
∞ |
|
||
A(l )= |
òj(x )cos lx dx , |
B(l )= |
òj(x )sin lx dx . |
|
|||||||||
p |
p |
|
|||||||||||
|
|
−∞ |
|
|
|
|
|
|
|
−∞ |
|
||
A(l B(l (48), |
|
||||||||||||
: |
|
|
|
|
|
|
|
|
|
||||
u(x; t ) = |
1 |
∞ |
é |
æ∞ |
2 |
2 |
|
öù |
|
||||
ò |
êj(x )ç |
ò |
e−a |
λ t cos l(x - x)dl ÷ú dx |
(51) |
||||||||
p |
|||||||||||||
|
|
|
ê |
ç |
|
|
|
÷ú |
|||||
|
|
|
|
−∞ ë |
è |
0 |
|
|
|
øû |
|
||
, (51) (43), (44).
(38) .
: |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
al |
|
= z , |
ξ − |
x |
= ς . |
|
|
|
|
|
|
|
|
|
||||||
t |
|
|
|
|
|
|
|
|
(52) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||
∞ |
|
|
a t |
|
|
|
|
∞ |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|||||
òe−a2λ2t cos l(x - x d)l = |
|
|
òe− z2 |
cos V z dz . |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
||||||||||||||
a t |
|
|
|
|||||||||||||||||
0 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
K (V )= òe−z2 |
cos V z dz , |
|
|
|
|
|
(53) |
||||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
∞ |
− z 2 |
|
|
|
|
|
|
1 |
|
− z 2 |
|
∞ V ∞ |
− z 2 |
|
|
|||||
¢ |
|
|
|
z sin V z dz = |
|
|
|
e sin V z | - |
|
òe |
|
cos V z dz |
(54) |
|||||||
|
|
|
|
|
|
|
|
|||||||||||||
K (V )= -òe |
|
2 |
|
2 |
|
|||||||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
|
|
|||
(53) (54), : |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
¢ |
|
|
|
|
V |
K (V ). |
|
|
|
|
(55) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
K (V )= - |
2 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(55):

|
|
|
|
|
|
K (ς )= |
− |
ς 2 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
e 4 |
, |
|
|
|
|
(56) |
|||||||||
|
|
|
|
|
|
|
|
|
|
∞ |
|
|
|
|
|
|
|
|
|
||
|
|
π |
|
|
|
|
|
|
|
|
|
|
|
|
|
π |
|
|
|||
C = |
|
|
, K (0 )= òe− z |
2 |
dz |
= |
|
|
|
. |
|||||||||||
|
|
|
|
|
|
|
|
||||||||||||||
2 |
|
|
|
2 |
|
||||||||||||||||
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|||||
(56) (52) (51): |
|||||||||||||||||||||
|
|
|
|
|
|
1 |
|
|
∞ |
|
|
|
(ξ − x 2) |
|
|
|
|
|
|
||
|
u(x; t )= |
|
|
|
ϕ (ξ )e− |
4a2t |
dξ |
|
|
(57) |
|||||||||||
|
2a |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
π t −ò∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|||
(57)
.
6..
|
∂2u |
+ |
∂ 2u |
+ |
∂ 2u |
|
= p(x;y;z ) |
(58) |
||||
|
2 |
2 |
2 |
|||||||||
|
∂ x |
|
|
∂ y |
|
|
|
∂ z |
|
|
|
|
. p(x;y;z) ≡ 0 , |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂2u |
+ |
∂2u |
|
+ |
∂2u |
|
= 0 . |
(59) |
|||
|
∂ x |
2 |
∂ y |
2 |
|
∂ z |
2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|||
, . ,
.
. |
|
|
|
|
|
|||
1) |
D , Γ , , |
|||||||
|
u(M ) = u(x; y; z), |
|||||||
|
. |
|||||||
2) |
Γ : |
|
|
|||||
|
|
|
|
α u(M )+ β |
∂u |
= ψ (M ,) M Γ , |
|
(60) |
|
|
|
|
|
|
|||
|
|
∂u |
|
|
∂n |
|
|
|
|
|
− |
|
Γ |
. |
|||
|
|
|
||||||
|
∂n |
|
||||||
, β = 0 , ,
u(M )= ψ1 M( , M Γ . |
(61) |
α = 0 , ,
:
∂u |
= ψ |
2 (M ,) M Γ . |
(62) |
|
|||
∂n |
|
|
|
3),
,
.
.
,
D , ,
J (x; y; z) = J xi + J y j + J z k .
. ,
J S ,
D ,
òòJ × n ds = 0 ,
S
n − ,
. ,
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
div J = 0 . |
(63) |
||||||||
|
- |
|||||||||||||
|
|
: |
|
|||||||||||
E |
|
|||||||||||||
|
|
|
= |
|
λ |
|
= λ |
|
, |
(64) |
||||
|
|
E |
J |
J |
E |
|||||||||
λ − ,
.
,
, E , . rot E = 0 .
,
, ; ϕ ,
,
E = grad ϕ .
(64) :
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J = λ grad ϕ . |
(65) |
||||||||
(63) (65) : |
|
||||||||||
λ div ( |
|
|
|
= 0 , |
|
|
|||||
grad ϕ |
(66) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
∂2ϕ |
+ |
∂2ϕ |
|
+ |
∂2ϕ |
= 0 . |
|
|||
|
2 |
2 |
2 |
|
|||||||
|
∂ x |
|
|
|
∂ y |
|
|
∂ z |
|
||

, ϕ .
,
ϕ , E , (65) .
7..
r0
f (ϕ , ϕ –
( . .3). u(r;ϕ , ,
,
|
∂2u |
+ |
∂2u |
= 0 |
|
∂ x2 |
∂ y 2 |
||
|
|
|
||
|
||||
u(r0 ;ϕ =) |
f ϕ . |
(67) |
||
(67) .
|
∂2u |
1 ∂u |
|
1 |
|
|
∂2u |
|
|
||||||
|
|
|
+ |
|
|
|
+ |
|
|
|
|
|
|
= 0 |
(68) |
|
∂ r |
2 |
r ∂ r |
r |
2 |
|
∂ ϕ |
2 |
|||||||
|
|
|
|
|
|
|
|
|
|||||||
u(r;ϕ . |
|
||||||||||||||
u(r;ϕ )= Φ ϕ (R r) |
. |
|
|
(69) |
|||||||||||
(68) (67), :
r |
Φ(ϕ )R |
′′ |
r( +) r Φ ϕ R( |
′ |
r) + Φ( )ϕ R r ( = 0 |
||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
′′ |
|
|
|
||||
|
|
|
|
′′ |
|
|
|
|
|
|
′′ |
|
|
′ |
|
r ( |
|
|
|
||
|
|
|
|
|
|
r |
2 |
|
|
|
|
|
|
2 |
|||||||
|
|
|
|
Φ |
(ϕ |
|
|
R (r )+ r R |
|
|
|
|
|||||||||
|
|
|
|
|
= − |
|
|
|
|
|
|
|
|
|
= −k |
. |
|||||
|
|
|
|
Φ(ϕ ) |
|
|
|
|
R(r ) |
|
|
|
|
||||||||
(70) : |
|
|
|
||||||||||||||||||
′′ |
|
2 |
Φ ϕ ( = 0 , |
r |
2 |
′′ |
|
|
|
′ |
r |
(− )k |
2 |
R r = 0 |
|||||||
Φ (ϕ )+ k |
|
|
|
R (r )+ r R |
|
|
|||||||||||||||
(71): Φ(ϕ = A cos kϕ + B sin kϕ .
(71) R(r ) = r m .
(71)
r 2 m(m −1 r m−2 + rmr m−1 − k 2r m = 0 |
m2 − k 2 = 0 . |
||||||
(71) |
|
||||||
|
|
|
|
R(r )= r k + Dr −k . |
|
||
(72) (73) (69): |
|
||||||
u |
k |
(r;ϕ =) |
A cos kϕ + B sin kϕ )( |
r k + D r− k ), k = 1,2,3,.... |
|||
|
|
k |
k |
k |
|
k |
|
k = 0 :
(70)
(71)
(72)
(73)
(74)

u |
0 |
= (A + B ϕ )(+ D ln r |
. |
|
|
0 0 |
0 0 |
||
ϕ , B0 = 0 ,
, D0 = 0 .
u0 = A0 .
2
(74) ,
Dk = 0, k = 1,2,3....
, (68)
|
|
|
|
|
|
u(r;ϕ )= |
A0 |
|
∞ |
(An cos nϕ + Bn sin nϕ )r n |
|
|
||||||||||||||||||
|
|
|
|
|
|
+ å |
|
(75) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
n=1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
(75) (67), : |
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
A0 |
|
∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
f (j) = |
+ å(An cos nj + Bn sin nj)r0n . |
|
|
|
(76) |
||||||||||||||||||||||||
2 |
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
n=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
, |
|
An Bn |
||||||||||||||||||||||||||||
|
1 |
|
π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
π |
|
|
|
|
|
|||
An = |
|
ò f (t )cos ntdt, Bn |
= |
|
|
ò f (t )sin ntdt, n = 0,1,2,.... |
||||||||||||||||||||||||
pr n |
|
pr n |
|
|||||||||||||||||||||||||||
0 |
|
−π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
−π |
|
|
|
|
||||
(75) An Bn (76), : |
|
|||||||||||||||||||||||||||||
|
u(r;j |
=) |
|
1 |
π |
f (t )dt + |
|
1 |
|
|
∞ |
π |
f (t )cos n t -( j |
æ |
r |
ön |
|
|||||||||||||
|
|
|
|
|
|
|
|
ç |
÷ |
|
||||||||||||||||||||
|
2p |
ò |
|
p å |
ò |
|
= |
|||||||||||||||||||||||
|
|
ç r |
÷ |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt ) |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
−π |
|
|
|
|
|
|
|
|
|
|
|
n=1 −π |
|
è 0 ø |
|
||||
|
|
|
1 |
|
π |
|
|
|
|
é |
|
|
∞ |
æ |
|
r |
|
ön |
|
|
ù |
|
|
|
|
|||||
= |
|
|
|
|
ò |
f (t )ê1 + 2åç |
|
|
|
|
÷ |
cos n(t - j ú)dt . |
|
|
|
|
||||||||||||||
2p |
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
ê |
|
|
n 1 |
ç r |
÷ |
|
|
|
ú |
|
|
|
(77) |
|||||||||||
|
|
|
|
|
|
−π |
|
|
|
|
ë |
|
|
= |
è |
|
0 |
ø |
|
|
|
û |
|
|
|
|
||||
r < r0
é |
∞ |
æ |
r |
ön |
ù |
∞ |
æ |
r |
ön |
||
ê1 + 2åçç |
÷÷ |
cos n(t -j ú)= 1 + åçç |
÷÷ |
[ein(t−ϕ )+ e−in t−ϕ ( = ) |
|||||||
r |
r |
||||||||||
ê |
n 1 |
è |
ø |
ú |
n 1 |
è |
ø |
|
|||
0 |
0 |
|
|||||||||
ë |
= |
û |
= |
|
|||||||
|
|
|
|
r |
|
|
|
i(t |
−ϕ ) |
|
|
r |
|
|
−i(t −ϕ ) |
|
|
|
|
|
æ |
|
ö2 |
|
|
|
|
|
|||||
|
|
|
|
|
e |
|
|
|
e |
|
|
|
|
1 - |
ç r |
÷ |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ç |
|
÷ |
|
|
|
|
|
||||
|
|
|
|
r0 |
|
|
|
|
|
|
r0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
= 1 + |
|
|
|
|
|
|
|
)+ |
|
|
|
|
|
|
|
|
= |
|
|
|
è r0 |
ø |
|
|
|
|
= |
||||||
1 - |
|
|
r |
|
e |
i(t −ϕ |
1 - |
|
|
r |
e |
−i(t −ϕ |
) |
|
r |
cos(t -j |
+) |
æ |
r |
ö2 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 - 2 |
ç |
÷ |
|
|||||||||||||||||
|
|
|
r |
|
|
|
|
r |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r0 |
ç |
|
÷ |
|
|||||||||||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
è r0 |
ø |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
= |
|
|
|
|
|
|
|
r 2 - r 2 |
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
r 2 |
- 2r r cos(t -j +) r 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
0 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
]
(78)
(77) (78):
u(r;ϕ =) |
1 |
π |
f (t ) |
|
r 2 |
− r 2 |
|
|
|
|
ò |
|
0 |
|
|
dt |
(79) |
||
2π |
r 2 |
− 2r r cos(t − ϕ |
+) r 2 |
||||||
|
|
−π |
0 |
0 |
|
|
|
|
|
. ,
f (ϕ − , u(r ;ϕ →) f ϕ , r → r0 . u(r ;ϕ
.
–
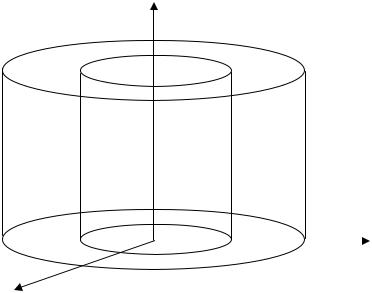
, .
,
: r = R1, r = R2 , z = 0, z = H
: u(R1 ;ϕ ; z =)u1, u R2 ;ϕ( ; z = u2
∂u(r ;ϕ ;0 |
) |
∂u(r ;ϕ ; H ) |
(80) |
|
|
= 0, |
|
= 0, |
|
∂z |
|
|||
|
∂z |
|
||
u1 , u2 − .
Z
H 
D |
O |
R1 |
|
Y
R2
X
5.
.
.
∂ 2u |
+ |
∂ 2u |
+ |
∂ 2u |
= 0 |
|
∂ x2 |
∂ y2 |
∂ z 2 |
||||
|
|
|