

19.1. Основные понятия и определения
Выделяют четыре основные задачи линейной алгебры: решение СЛАУ, вычисление определителя матрицы, нахождение обратной матрицы, определение собственных значений и собственных векторов матрицы.
Задача отыскания решения СЛАУ с n неизвестными - одна из наиболее часто встречающихся в практике вычислительных задач, так как большинство методов решения сложных задач основано на сведении их к решению некоторой последовательности СЛАУ.
Обычно СЛАУ записывается в виде
n
^ciyXj = bi ;1 < i < n, или коротко
j=1
AX = b,
A =
x =
b =
(19.1)
Xi


x
anlan 2...ann
Здесь А и b заданы, требуется найти X *, удовлетворяющий (19.1).
Известно, что если определитель матри-
— цы \A ф 0, то СЛАУ имеет единственное ре-xi
Рис 19 1 шение. В противном случае решение либо от-
сутствует (если b ф 0), либо имеется бесконечное множество решений (если b = 0). При решении систем, кроме условия |A| ф 0, важно
чтобы задача была корректной, т.е. чтобы при малых погрешностях правой части Ab и (или) коэффициентов Aa^ погрешность решения AX * также оставалась малой. Признаком некорректности, или плохой обусловленности, является близость к нулю определителя матрицы.
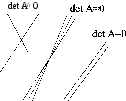
Плохо обусловленная система двух уравнений геометрически соответствует почти параллельным прямым (рис.19.1). Точка пересечения таких прямых (решение) при малейшей погрешности коэффициентов резко сдвигается. Обусловленность (корректность) СЛАУ характеризуется числом
X = |AI • A-1 > 1. Чем дальше х от 1, тем хуже обусловлена система. Обычно
при х > 10 система некорректна и требует специальных методов решения -методов регуляризации. Приведенные ниже методы применимы только для корректных систем.
Методы решения СЛАУ делятся на прямые и итерационные.
Прямые методы дают в принципе точное решение (если не учитывать ошибок округления) за конечное число арифметических операций. Для хорошо обусловленных СЛАУ небольшого порядка n < 200 применяются практически только прямые методы.
Наибольшее распространение среди прямых методов получили метод Гаусса для СЛАУ общего вида, его модификация для трехдиагональной матрицы - метод прогонки и метод квадратного корня для СЛАУ с симметричной матрицей.
Итерационные методы основаны на построении сходящейся к точно-
му решению
X
рекуррентной
последовательности
векторов
x ■ x ■
 ->
x . Итерации
выполняют до тех пор, пока норма <
s. (г-
заданная
малая величина).
->
x . Итерации
выполняют до тех пор, пока норма <
s. (г-
заданная
малая величина).
Итерационные методы выгодны для систем большого порядка n>100, а также для решения плохо обусловленных систем. Многообразие итерационных методов решения СЛАУ объясняется возможностью большого выбора рекуррентных последовательностей, определяющих метод. Наибольшее распространение среди итерационных методов получили одношаговые методы простой итерации и Зейделя с использованием релаксации.
Для контроля полезно найти невязку полученного решения х:
max
1<к <n
I
aMxi
если А велико, то это указывает на грубую ошибку в расчете.
Ниже приведено описание алгоритмов указанных методов решения
СЛАУ.