

4.3. Моделирование переходных процессов на пэвм
С помощью известной системы математических расчетов Matlab, в которую встроен специальный пакет для исследования систем автоматического управления – Control System Toolbox, можно по передаточной функции системы построить необходимые графики временных характеристик. В Matlab также можно представить эквивалентную модель системы в среде Simulink и исследовать ее характеристики в этом приложении.
Рассмотрим
применение описанных возможностей
работы в Matlab
на примере системы, структурная схема
которой задана в виде последовательного
соединения двух апериодических звеньев
с параметрами: K1
= 2; K2
= 50;
![]() (рис. 4.3).
(рис. 4.3).
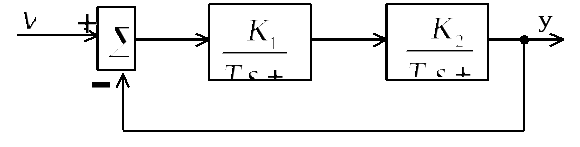
Рис. 4.3
Для
этой системы построим график переходной
функции
![]() двумя способами.
двумя способами.
1. При использовании операторов пакета Control System Toolbox запишем в командном окне следующую программу:
K1 = 2; K2 = 50; T1 = 0,1; T2 = 0,1;
w= tf([K1*K2], [T1*T2 (T1+T2) 1]);
w1= feedback(w,1);
step(w1)
В первой строке происходит определение параметров системы и присвоение им численных значений.
Если передаточную функцию разомкнутой системы представить в виде отношения полиномов по степеням s :
 ,
,
то удобно использовать оператор tf, который позволяет записывать передаточные функции путем формирования векторов коэффициентов числителя и знаменателя так, как это представлено во второй строке программы.
В третьей строке оператор feedback замыкает систему с единичным коэффициентом усиления в цепи обратной связи.
Оператор
step
позволяет
построить переходной процесс системы
при подаче на ее вход единичной ступенчатой
функции
![]() .
.
График переходного процесса, полученный в результате выполнения программы, представлен на рис. 4.4.
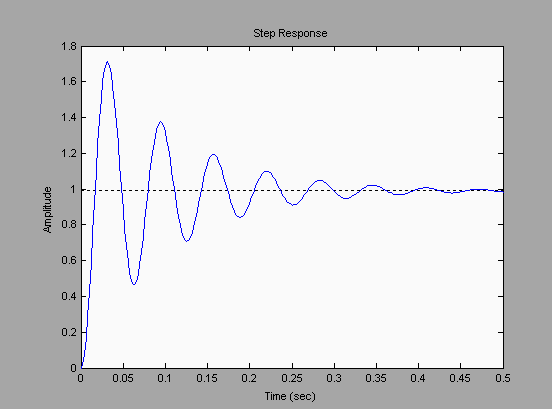
Рис. 4.4
2. Представим модель системы в среде Simulink, как показано на рис. 4.5, используя стандартные блоки из библиотеки ее приложения.
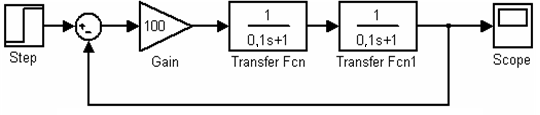
Рис. 4.5
При моделировании получим на экране виртуального осциллографа (Scope) график переходного процесса (рис. 4.6), который совпадает с приведенным на рис. 4.4.
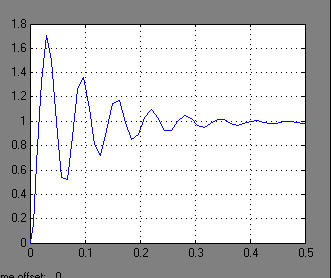
Рис. 4.6
Аналогичным образом могут быть построены и другие характеристики системы. Более подробно основы работы в системе Matlab рассматриваются в [8].
5. Устойчивость процессов в системах автоматического управления
5.1. Понятие устойчивости линейных систем
Общие определения устойчивости процессов, справедливые как для линейных, так и для нелинейных систем, будут даны во второй части конспекта лекций. Здесь отметим, что свойство устойчивости или неустойчивости заданного процесса, протекающего в системе, рассматривается по отношению к другим процессам той же системы, отличающимся от заданного за счет изменений начальных условий. величинами, отклоняющими процесс от заданного, являются возмущения начальных условий.
Для случая линейной системы динамические процессы в ней описываются линейным дифференциальным уравнением:
![]() ,
(5.1)
,
(5.1)
общее
решение которого определяется выражением
(4.3):
![]() .
.
Изменение
начальных условий влияет только на
поведение свободной составляющей и не
влияет на
![]() ,
откуда следует, что устойчивость будет
определяться поведением свободной
составляющей. Если
,
откуда следует, что устойчивость будет
определяться поведением свободной
составляющей. Если![]() ,
тo
процессы в линейной системе будем
называть асимптотичeски
устойчивыми,
при
,
тo
процессы в линейной системе будем
называть асимптотичeски
устойчивыми,
при
![]() –нeустойчивыми,
и если при любом
–нeустойчивыми,
и если при любом
![]() свободная составляющая ограничена, то
процессы будут простоустойчивы.
Если одно из указанных свойств присуще
какому-либо процессу, то для линейной
системы оно будет справедливо для всех
процессов. Поэтому принято говорить об
асимптотической устойчивости,
неустойчивости или просто устойчивости
линейной системы. В последнем случае
еще говорят, что линейная система
находится на границе
устойчивости
или является нeйтpальной.
свободная составляющая ограничена, то
процессы будут простоустойчивы.
Если одно из указанных свойств присуще
какому-либо процессу, то для линейной
системы оно будет справедливо для всех
процессов. Поэтому принято говорить об
асимптотической устойчивости,
неустойчивости или просто устойчивости
линейной системы. В последнем случае
еще говорят, что линейная система
находится на границе
устойчивости
или является нeйтpальной.
Структура свободной составляющей имеет вид (4.4) или (4.5).
Из
(4.4), (4.5) следует, что поведение свободной
составляющей во времени не зависит от
величин
![]() и соответственно от начальных условий,
а полностью определяется видом корней
и соответственно от начальных условий,
а полностью определяется видом корней![]() .
.
В
комплексной
плоскости
корней
корни интерпретируются
как соответствующие точки. Если корень
![]() лежит слева от мнимой оси, т. е.
лежит слева от мнимой оси, т. е.![]() ,
будем называть еголeвым
коpнeм,
если
,
будем называть еголeвым
коpнeм,
если
![]() –пpавым.
–пpавым.
Пусть
![]() ,
,![]() – левый корень, тогда составляющая
– левый корень, тогда составляющая![]() в (4.4) при
в (4.4) при![]() будет затухать и стремиться
к 0, а в
случае правого корня
будет затухать и стремиться
к 0, а в
случае правого корня![]() – наоборот возрастать до бесконечности.
Таким образом, при различных корнях
характеристического уравнения, если
все корни левые,
– наоборот возрастать до бесконечности.
Таким образом, при различных корнях
характеристического уравнения, если
все корни левые,![]() ,
что соответствует факту асимптотической
устойчивости системы. Если хотя бы один
корень правый (
,
что соответствует факту асимптотической
устойчивости системы. Если хотя бы один
корень правый (![]() ),
то
),
то![]() и система будет неустойчива. Если для
всех различных корней справедливо
соотношение
и система будет неустойчива. Если для
всех различных корней справедливо
соотношение![]() ,
то в свободной составляющей появятся
слагаемые, которые будут либо постоянными
(нулевой корень), либо будут изменяться
по гармоническому закону (чисто мнимые
корни), и составляющая
,
то в свободной составляющей появятся
слагаемые, которые будут либо постоянными
(нулевой корень), либо будут изменяться
по гармоническому закону (чисто мнимые
корни), и составляющая![]() будет ограничена, что соответствует
нейтральной системе.
будет ограничена, что соответствует
нейтральной системе.
В
случае кратного корня
![]() ,
если
,
если![]() ,
,![]()
![]() ,
так как при любом
,
так как при любом![]() функция
функция![]() затухает быстрее, чем возрастает функция
в скобках. Если же
затухает быстрее, чем возрастает функция
в скобках. Если же![]() ,
то это утверждение не правомерно.
,
то это утверждение не правомерно.
Таким
образом, необходимым и достаточным
условием асимптотической устойчивости
линейной системы, описываемой уравнением
(5.1), является выполнение соотношения
![]()
![]() .
Система будет просто устойчива, если
.
Система будет просто устойчива, если![]() и среди корней, лежащих на мнимой оси,
нет кратных. Система будет неустойчива,
если имеется хотя бы один корень, для
которого
и среди корней, лежащих на мнимой оси,
нет кратных. Система будет неустойчива,
если имеется хотя бы один корень, для
которого![]() ,
или хотя бы один кратный корень, лежащий
на мнимой оси.
,
или хотя бы один кратный корень, лежащий
на мнимой оси.
Суждение об устойчивости можно сделать, найдя корни характеристического уравнения замкнутой системы
![]() .
(5.2)
.
(5.2)
Эту
задачу можно упростить, так как фактически
нам достаточно знать лишь расположение
корней в плоскости корней относительно
мнимой оси, которую называют границей
устойчивости.
Выделяют три типа границы устойчивости:
aпepиодичeского
типа, которая характеризуется нулевым
корнем характеристического уравнения,
колeбательного
типа, что соответствует наличию пары
чисто мнимых корней, и границу,
соответствующую бесконечно удаленному
корню (![]() (5.2)). Если все корни уравнения (5.2) лежат
слева от мнимой оси, т.е.
(5.2)). Если все корни уравнения (5.2) лежат
слева от мнимой оси, т.е.![]()
![]() ,
то характеристический полином
,
то характеристический полином![]() будем называтьполиномом
Гуpвица,
или гуpвицeвым
полиномом.
будем называтьполиномом
Гуpвица,
или гуpвицeвым
полиномом.
Определение расположения корней уравнения (5.2) относительно мнимой оси без их непосредственного вычисления производят на основе критериев устойчивости, которые делятся на две группы: алгебраические и частотные.