

3Устрічна
Адаптивна
Розімкнена
Зворотна
Замкнена
36. Вкажіть тип системи ЧПК, у якій використовують датчики, що видають інформацію про стан верстатної системи: зношування інструменту, температуру вузла, тощо?
3Устрічна
Адаптивна
Розімкнена
Зворотна
Замкнена
37. Які основні елементи забезпечують роботу автоматичної коробки швидкостей верстата з ЧПК?
Пересувні блоки
Висувні шпонки
Електромагнітні муфти
Крокові двигуни
Рукоятка
38. Яка загальна назва вузла верстата з ЧПК, що призначений для зберігання значної кількості інструменту (N>10)?
Револьверна голівка
Склад інструменту
Інструментальний магазин
Барабан
Автооператор
39. Як називають вузол багатоопераційного верстата з ЧПК, що призначений для обміну інструментом між шпинделем і накопичувачем інструменту?
Диференціал
Обмінник
Супорт
Револьверна голівка
Автооператор
40. Вкажіть тип передачі гвинт-гайка, яка використовується у переважній більшості верстатів з ЧПК у приводі поступальних переміщень робочих органів.
Гідравлічна
Точна
Ковзання
Кочення
Регульована
41. До якої групи згідно із класифікацією «ЭНИИМС» відносяться шліфувальні верстати?
5
3
4
6
8
42. Гітара змінних коліс у приводі токарно-гвинторізного верстата мод. 1А616П використовується як …
Проміжна передача
Постійні зубчасті передачі
Пасова передача
Орган настроювання приводу подач
Запасні зубчасті колеса
43. Вкажіть механізм, який безпосередньо вимикає поздовжню подачу верстата мод.1336М при роботі з використанням упорів, встановлених на барабані?
Кулачковий механізм
Мальтійський механізм
Храповий механізм
Електромагнітна муфта
Механізм «падаючого черв’яка»
44. Вкажіть назву основних елементів приводу, наявність яких забезпечує автоматичне перемикання режиму роботи токарно-револьверного верстата мод. 1П326.
Електромагнітні муфти
Пересувні блоки зубчастих коліс
Гітара змінних коліс
Змінні шківи пасової передачі
Гідравлічні пристрої
45. В який спосіб в приводі головного руху токарно-гвинторізного верстата мод 1К62 забезпечується реверсування напрямку обертання шпинделя?
Застосуванням реверсивного механізму із конічних коліс
Реверсуванням напрямку обертання ротора двигуна
Застосуванням паралельних кінематичних ланцюгів
Гідравлічним пристроєм
У інший спосіб
46. Вкажіть спосіб регулювання величини подачі у приводі вертикально-свердлувального верстата мод. 2А 135?
Переміщення блоків зубчастих коліс
Варіатором
Переміщення висувних шпонок коробки подач
Гідравлічним дроселем
Гітарою змінних коліс
47. У який спосіб на радіально-свердлувальному верстаті мод. 2Е52 забезпечується обробка отворів з нахиленими осями під довільним кутом до площини стола?
Застосуванням спеціального пристрою
Поворотом правої частини траверзи та свердлувальної голівки
Нахилянням колони
Поворотом стола
Використанням підкладок під деталь
48. Вкажіть, у який спосіб регулюється величина подачі у довбального верстата мод. 743.
Коробкою подач
Зміною довжини плеча двоплечого важеля
Гітарою змінних коліс
Кулісним механізмом
Змінними шківами пасової передачі
49. У якого із вказаних нижче верстатів є кругова подача стола?
Токарного
Вертикально-фрезерувального
Поперечно-стругального
Довбального
Радіально-свердлувального
50. Вкажіть назву вузла горизонтально-протягувального верстата, який забезпечує самовстановлення деталі при протягуванні отвору.
Плита поворотна
Адаптер
Стіл
Супорт
Станина
51. Вкажіть повну відповідь на питання, які методи ділення застосовуються при використанні ділильних головок.
Безпосереднє, просте, складне
Безпосереднє, просте, диференційне
Просте, складне, диференційне
Просте, диференційне, довільне
Безпосереднє, просте, довільне
52. Як називають праву переставну опору інструментальної оправки горизонтально-фрезерувального верстата?
Підвіска
Люнет
Упор
База
Опора
53. У який спосіб регулюється частота обертання шпинделя бабки виробу у внутрішньо-шліфувальному верстаті мод. 3А252?
Клинопасовим варіатором
Коробкою передач
Гітарою змінних коліс
Змінними шківами пасової передачі
Не регулюється
54. У який спосіб здійснюється шліфування на плоскошліфувальному напівавтоматі із круглим столом?
Периферією шліфувального круга
Абразивними порошками
Абразивними пастами
Торцем шліфувального круга
Шліфувальними брусками
55. У який спосіб на зубодовбальному верстаті мод. 514 можна обробляти циліндричні зубчасті колеса із гвинтовим зубом?
Не обробляються
Із застосуванням гвинтових напрямних та косозубих довбачів
Із застосуванням косозубих довбачів
Із застосуванням гвинтових напрямних
Іншим способом
56. Вкажіть тип інструменту, що використовується при виготовленні конічних коліс із круговими зубами на зуборізному верстата мод. 525.
Черв’ячна фреза
Різцева головка
Довбач
Два різці
Модульна фреза
57. Вкажіть повну назву токарного автомата мод. 1106.
Токарний кулачковий автомат
Автомат фасонно-поздовжнього точіння
Багатошпиндельний токарний автомат
Фасонно-відрізний автомат
Токарно-револьверний автомат
58. Вкажіть число кутових швидкостей, з якими обертається розподільний вал автомата мод. 1240-6 впродовж циклу обробки деталі.
1
2
3
4
6
59. Який тип кулачків використовується у механізмі автоматичної подачі та затиску заготовки автомата мод. 1Д118?
Дискові
Торцеві
Кулачкові муфти
Циліндричні
Сферичні
60. Який закон профілювання профілю кулачка забезпечує рівномірну (постійну) подачу супорта токарного кулачкового автомата?
Коло
Спіраль Архімеда
Гвинтова поверхня
Синусоїдальний
Експотенціальний
61. Вкажіть тип системи керування верстата з ЧПК, якщо додаткове позначення в кінці індексу моделі …Ф4?
Програмна
Позиційна
Контурна
З цифровою індикацією та попереднім набором координат
Комбінована
62. Вкажіть спосіб кодування номера інструменту у вертикально-фрезерувального верстата з ЧПК мод. ЛФ-260 МФ3.
З допомогою командоапарата
Кодуванням номера гнізда магазину інструментів
Встановленням кодових кілець на хвостовику оправки інструменту
Кодуванням інструменту
Закріпленням інструменту за гніздом магазину інструментів
63. Вкажіть основний елемент механізму орієнтації та фіксації револьверної голівки токарно-револьверного верстата з ЧПК мод. 1В340Ф3О.
Пневмоциліндр
Жорсткий упор
Пакет тарілчастих пружин
Пара плоских конічних зубчастих коліс
Гвинтова передача
64. Який тип пасових передач використовується у приводах токарних верстатів з ЧПК із функцією нарізання різьб різцями?
Клинопасові
Плоскозубчасті
Плоскопасові
Клинозубчасті
Інший тип
65. Вкажіть тип гідродвигуна, що використовується у гідравлічних підсилювачах моментів?
Шестеренний
Радіально-лопастний
Аксіально-плунжерний
Радіально-плунжерний
Гідроциліндр
66. Який тип електродвигунів використовують у приводах подач токарних верстатів з ЧПК?
Змінного струму із короткозамкненим ротором
Змінного струму синхронні
Змінного струму асинхронні
Постійного струму із ступінчастим регулюванням
Постійного струму із плавним регулюванням
67. Вкажіть тип приводного елементу, який використовується для переміщень стола вертикально-фрезерувального верстата з ЧПК мод. ЛФ-260 МФ3.
Силовий гідроциліндр двосторонньої дії
Передача гвинт-гайка ковзання
Передача гвинт-гайка кочення
Силовий гідроциліндр односторонньої дії
Рейкова передача
68. Вкажіть тип приводного елементу, який використовується для переміщень стола вертикально-свердлувального верстата з ЧПК мод. 2Р135Ф2.
Силовий гідроциліндр двосторонньої дії
Передача гвинт-гайка ковзання
Передача гвинт-гайка кочення
Силовий гідроциліндр односторонньої дії
Рейкова передача
69. У який спосіб забезпечується закріплення револьверної голівки вертикально-свердлувального верстата з ЧПК мод. 2Р135Ф2.
Кулачковий механізм
Пакетом тарілчастих пружин
Ексцентриковий затиск
Циліндричною пружиною стискання
Гідроциліндром
70. Вкажіть тип приводу переміщень верхнього відрізного супорта токарно-револьверного верстата з ЧПК мод. 1В340Ф3О.
Силовий гідроциліндр двосторонньої дії
Передача гвинт-гайка ковзання
Передача гвинт-гайка кочення
Силовий гідроциліндр односторонньої дії
Рейкова передача
71. Для пристрою ЧПК типу Н-33 підготовча функція G17 означає:
Кругова інтерполяція за годинниковою стрілкою
Вибір площини обробки XOY
Кругова інтерполяція проти годинникової стрілки
Витримка часу
Вибір площини обробки YOZ
72.Для пристрою ЧПК типу Н-33 підготовча функціяG03 означає:
Кругова інтерполяція за годинниковою стрілкою
Вибір площини обробки XOY
Кругова інтерполяція проти годинникової стрілки
Витримка часу
Вибір площини обробки YOZ
73. Вкажіть символ, що відповідає адресі функції корекції заданого переміщення в кадрі програми для верстатів з ЧПК.
F
L
G
R
S
74. Для пристрою ЧПК типу 2П32-3 функція G91 означає:
Цикл нарізання різьби з виведенням мітчика у точку «0» деталі
Цикл розточування з виведенням різця у точку «0» верстата
Пауза для ручної заміни комплекту інструменту
Цикл свердлування з виведенням свердла у точку «0» деталі
Цикл свердлування з виведенням свердла у точку «0» верстата
75. Для пристрою ЧПК типу 2П32-3 функція G84 означає:
Цикл нарізання різьби з виведенням мітчика у точку «0» деталі
Цикл розточування з виведенням різця у точку «0» верстата
Пауза для ручної заміни комплекту інструменту
Цикл свердлування з виведенням свердла у точку «0» деталі
Цикл свердлування з виведенням свердла у точку «0» верстата
76. Для пристрою ЧПК типу 2П32-3 функція М06 означає:
Цикл нарізання різьби з виведенням мітчика у точку «0» деталі
Цикл розточування з виведенням різця у точку «0» верстата
Пауза для ручної заміни комплекту інструменту
Цикл свердлування з виведенням свердла у точку «0» деталі
Цикл свердлування з виведенням свердла у точку «0» верстата
77. Для системи керування «Електроніка НЦ-31» функція G12означає:
Обробка дуги у 90° проти годинникової стрілки
Обробка дуги у 90° за годинниковою стрілкою
Обробка дуги менше 90° проти годинникової стрілки
Обробка дуги менше 90° за годинниковою стрілкою
Параметричний виклик підпрограми
78. Для системи керування «Електроніка НЦ-31» технологічний цикл G77означає:
Багатопрохідний цикл обточування з поперечною подачею
Однопрохідний цикл обточування з поперечною подачею
Однопрохідний цикл обточування з поздовжньою подачею
Цикл глибокого свердлування
Багато прохідний цикл обточування з поздовжньою подачею
79. Для системи керування «Електроніка НЦ-31» функція G04означає:
Кругова інтерполяція за годинниковою стрілкою
Кругова інтерполяція проти годинникової стрілки
Витримка часу
Цикл глибокого свердлування
Повтор частини програми
80. Для системи керування «Електроніка НЦ-31» функція G92означає:
Зміщення початку відліку координат
Витримка часу
Цикл глибокого свердлування
Повтор частини програми
Нарізування різі мітчиком або плашкою
Експлуатація верстатів
1. Як називається подія, після якої виріб перестає повністю або частково виконувати свої функції?
відмова
надійність
безвідмовність
ремонтопридатність
міцність
2. Які з наведених літер використовують для позначення класу точності обладнання?
Д
В
К
У
Л
3. Яка із представлених на рисунку залежностей характеризує графік експлуатації обладнання?

1
2
3
4
5
4. На представленому графіку експлуатації по осі ординат відкладують

Напруження
Договічність
Частоту навантаження
Інтенсивність відмов
Температуру
5. Який вплив має чинити прискорювальний фактор в процесі “тренування” виробу?
уповільнювати процес появи потенційних дефектів
не впливати на процес появи потенційних дефектів
пришвидшувати процес появи потенційних дефектів
вичікувати
скачкоподібний
6. Як називається перехід матеріалу із квазістабільного стану в стабільний, що супроводжується зміною внутрішньої структури матеріалів і геометрії елементів виробу?
процес зношування
процес старіння
процес припрацювання
процес деформування
процес тертя
7. Якщо частота навантаження знаходиться в межах 0,1<f<10 Гц, то таке навантаження називається
Високочастотне навантаження
Низькочастотне навантаження
Cередньо частотне навантаження
Квазістатичне навантаження
Ультразвукове навантаження
8. Вкажіть, яка крива представлена на рисунку є кривою Веллера (кривою втоми).

1
3
4
5
6
9. В яких координатах представляється крива втомного руйнування?

σmax - N
σmin - N
![]() √
√
![]()
σmin-K
10. Напруження, яке відповідає прийнятій базі випробовувань, називається границею витривалості (втоми). Яке це напруження?
найбільше
найменше
середнє
порогове
надзвичайне
11. Як буде змінюватися границя витривалості (втоми) при перехові від випробувань в вакуумі до випробувань на повітрі? Вона буде …
Незмінною
Зростатиме
Дорівнювати нулю
Зменшуватися
Наближатиметься до 1
12. Як буде змінюватися границя витривалості (втоми) при зростанні частоти навантаження з 10Гц до 50Гц? Вона буде …
Незмінною
Зростатиме
Дорівнювати нулю
Зменшуватися
Наближатиметься до 1
13. Як змінюється границя витривалості (втоми) при випробуваннях у поверхнево-активних середовищах (ПАС)? Вона буде …
Незмінною
Зростатиме
Дорівнювати нулю
Зменшуватися
Наближатиметься до 1
14. Розвантажувальні надрізи використовують для

підвищення зносостійкості
покращення якості поверхні
зменшення концентрації напружень
покращення доступу повітря
підведення мастила
15. Метод «додаткових надрізів» застосовують для

підвищення зносостійкості
покращення якості поверхні
зменшення концентрації напружень
зміни напрямку силового потоку
покращення якості поверхні
16. Що таке СГМ?
стандартизована гідна металопродукція
служба головного машинобудівника
середня границя міцності
служба головного механіка
служба метрології
17. Що таке ПТЕ?
правила технологічної експлуатації
правила технічної експлуатації
пристрої транспортування електроенергії
пристрої технологічної експлуатації
правила термінової евакуації
18. Яке коливання температури допускається для верстатів класу точності П?
±1о
±4о
±12о
±10о
±5о
19. Який вид опалення приміщень є найкращим для верстатів класів точності В, А і С?
повітряне
водяне опалення
центральне будь якого типу
випромінюванням
кондиційоване
20. В напрямку якої із сторін світу дозволяється облаштування вікон в приміщеннях для верстатів нормальної точності?
тільки північної
тільки південної
тільки західної
тільки східної
будь-якої
21. На яку основу рекомендується встановлювати верстати класу А?
бетонні фундаменти, оточені віброізолюючим шаром
масивні бетонні фундаменти, встановлені на пружини з демпферами
віброопори
гумові прокладки безпосередньо на бетонній підлозі
бетонні фундаменти без віброізолюючого шару
22. На яку основу рекомендується встановлювати верстати класу В з нежорсткими станинами?
бетонні фундаменти, оточені віброізолюючим шаром
масивні бетонні фундаменти, встановлені на пружини з демпферами
віброопори
гумові прокладки безпосередньо на бетонній підлозі
бетонні фундаменти без віброізолюючого шару
23. На яку основу рекомендується встановлювати важкі верстати класу В?
бетонні фундаменти, оточені віброізолюючим шаром
масивні бетонні фундаменти, встановлені на пружини з демпферами
віброопори
гумові прокладки безпосередньо на бетонній підлозі
бетонні фундаменти без віброізолюючого шару
24. На яку основу рекомендується встановлювати верстати класу П з нежорсткими станинами?
бетонні фундаменти, оточені віброізолюючим шаром
масивні бетонні фундаменти, встановлені на пружини з демпферами
віброопори
гумові прокладки безпосередньо на бетонній підлозі
бетонні фундаменти без віброізолюючого шару
25. Який термін перед монтуванням верстату необхідно витримати після укладання бетону на фундаменті, побудованому із використанням нормального портландцементу?
не менше 7 днів
не менше 10 днів
від 1 до 3 днів
від 3 до 5 днів
не менше 14 днів
26. Який термін перед пуском верстата необхідно витримати після укладання бетону на фундаменті, влаштованому із нормального портландцементу?
не менше 21 днів
не менше 14 днів
від 14 до 18 днів
від 16 до 14 днів
не менше 18 днів
27. Всі роботи із планового технічного обслуговування та ремонту виконуються в певній послідовності і утворюють
ряди чисел
арифметичну прогресію
повторювані цикли
геометричну прогресію
Диференційні ряди
28. Ремонтний цикл (Цр) – це сукупність різних видів планового ремонту, що повторюються і виконуються в передбаченій послідовності через рівні проміжки годин оперативного часу роботи устаткування. Як називають ці проміжки часу?
міжопераційним періодом
міжремонтними періодами
проміжком часу
відстанню
швидкістю
29. Структура ремонтного циклу (Сцр) - це перелік
координат
видів ремонтів
верстатів
робітників
цехів
30. Тривалість ремонтного циклу - це проміжок часу між
двома середніми ремонтами
трьома поточними ремонтами
двома капітальними ремонтами
середнім і поточним
двома поточними
31. Втома як універсальне явище зменшення несучої здатності матеріалів спостерігається в першу чергу при дії повторних циклічно змінних навантажень і в корозійних середовищах називається …
термічною
високочастотною
корозійною
малоцикловою
контактною
32. Якщо частота навантаження знаходиться в межах 10<f>100 Гц, то таке навантаження називається …
Високочастотне
Низькочастотне
Середньочастотне
Квазістатичне
Ультразвукове
33. Якщо частота навантаження знаходиться в межах f > 1000 Гц, то таке навантаження називається …
Високочастотне
Низькочастотне
Середньочастотне
Квазістатичне
Ультразвукове
34. Для визначення фізичної границі втоми випробування зразків провдять при базі випробувань N циклів навантаження …
![]()
![]()
![]()
![]() √
√
![]()
35. Як буде змінюватися границя витривалості (втоми) при перехові від випробувань на повітрі до випробувань в дистильованій воді. Вона буде …
Незмінною
Зростатиме
Дорівнювати нулю
Зменшуватися
Наближатиметься до 1
36. Яка нормальна температура в приміщенні, де знаходиться устаткування?
14о
16о
18о
20о
22о
37. Яке коливання температури допускається для верстатів класу точності Н?
±1о
±4о
±12о
±10о
±5о
38. Яке коливання температури допускається для верстатів класу точності В?
±1о
±2о
±0,25о
±5о
±0,5о
39. Яке коливання температури допускається для верстатів класу точності А?
±1о
±2о
±0,25о
±5о
±0,5о
40. На яку основу рекомендується встановлювати верстати класу С?
бетонні фундаменти, оточені віброізолюючим шаром
масивні бетонні фундаменти, встановлені на пружини з демпферами
віброопори
гумові прокладки безпосередньо на бетонній підлозі
бетонні фундаменти без віброізолюючого шару
Промислові роботи
1. Якими основними обставинами визначається розмаїття моделей ПР та їх конструкцій?
типом освітлення цеху
великою кількістю типорозмірів верстатів
людськими ресурсами
великою кількістю типорозмірів об'єктів, заготовок і виробів,
якими повинний маніпулювати робот
великою кількістю типорозмірів станин
2. Де розробляються робочі органи ПР?
в проектних організаціях
в учбових закладах
для конкретних умов безпосередньо на підприємстві
у відповідному міністерстві
в відділі маркетингу
3. Які пристрої відносяться до робочих органів ПР, що призначені для взяття й утримання деталі?
супорт верстату
механізм повороту
механізм переміщення руки ПР
захватні пристрої
транспортер
4. Які пред'являються додаткові спеціальні, вимоги до захватних пристроїв ПР, що працюють в умовах серійного виробництва?
надійність захоплення й утримання об'єкта
стабільність базування
неприпустимість ушкодження чи руйнування об'єктів захоплення
широкодіапазонність
забезпечення захоплення близько розташованих деталей
5. Які пред'являються вимоги загального характеру до захватних пристроїв ПР, що працюють в умовах серійного виробництва?
широкодіапазонність
забезпечення захоплення близько розташованих деталей
стабільність базування
надійність захоплення й утримання об'єкта
легкість і швидкість заміни
6. Приклад застосування технологічних робочих органів:
кліщі для контактного точкового зварювання
стабільність базування
неприпустимість ушкодження чи руйнування об'єктів захоплення
розробка креслень
переміщення ПР
7. Захватні пристрої по числу робочих позицій поділяються на
багаторядні
багатомісні
однопозиційні і багатопозиційні
транспортування заготовок
переміщення ПР
8. Захватні пристрої по характеру керування бувають:
некеровані
ручні
командні
жорстко програмовані
адаптивні
9. Який це робочий орган?
для затиску деталі
для пресування
для фарбування
для транспортування заготовок
кліщі для контактного точкового зварювання
10. Яка система не входить в систему ПР?
робочий орган
виконавча
сенсорна
амплітудно-фазова частотна
система обробки інформації
11. Що не відноситься до навколишнього середовища промислового робота?
технологічне устаткування
міжцеховий транспорт
система видалення стружки
об'єкти маніпулювання
перешкоди в його робочій зоні
12. Що забезпечує виконавча система ПР?
кластерний аналіз
розпізнавання образів
класифікація
забезпечує можливість цілеспрямованої дії робота на навколишнє середовище
механічну обробку деталей
13. Що не забезпечує керуюча система обробки інформації ПР?
переміщення руки ПР
регулювання режимів різання
виробляє закон управління виконавчою системою на основі сигналів зворотного зв'язку від інформаційно-вимірювальної системи
організовує спілкування робота з людиною-оператором на заданій мові
планує дії робота і ухвалює цілеспрямовані рішення про поворот руки ПР
14. Що не забезпечує сенсорна система ПР?
передачу сигналу в зовнішнє середовище
служить для сприйняття про стан зовнішнього середовища
перетворення інформації
результати дії на неї виконавчої системи
стан самого робота відповідно до потреб керуючої системи
15. Що є промисловим роботом?
автоматична машина, в якій проходить процес пресування
автоматична машина, в якій проходить процес різання
автоматична машина стаціонарна або пересувна, що складається з виконавчого пристрою у вигляді маніпулятора, який має декілька ступенів рухливості, і пристрою програмного управління для виконання у виробничому процесі рухових функцій
автоматична машина, в якій проходить процес свердлування
автоматична машина, в якій проходить процес шліфування
16. Що є маніпулятором?
визначення форми відображення вимірюваних поточних (чи миттєвих) характеристик об'єкта, що спостерігається
класифікаційне угруповання в системі класифікації, що поєднує визначену групу об'єктів по деякій ознаці
керований пристрій для виконання рухових функцій, аналогічних функціям руки людини при переміщенні об'єктів в просторі, оснащений робочим органом
засіб для програмування ПР
складова частина виконавчого пристрою для безпосереднього виконання технологічних операцій і (або) допоміжних переходів
17. Що є робочим органом ПР?
засіб для програмування
складова частина його виконавчого пристрою для безпосереднього виконання технологічних операцій і (або) допоміжних переходів
керований пристрій для виконання рухових функцій, аналогічних функціям руки людини при переміщенні об'єктів в просторі, оснащений робочим органом
автоматична машина, стаціонарна або пересувна, така, що складається з виконавчого пристрою у вигляді маніпулятора, що має декілька ступенів рухливості
пристрій програмного управління для виконанняу виробничому процесі рухових функцій
18. Що є пристроєм управління ПР?
складова частина робота для формування і видачі керуючих дій виконавчому пристрою відповідно до програми
складова частина його виконавчого пристрою для безпосереднього виконання технологічних операцій і (або) допоміжних переходів
керований пристрій для виконання рухових функцій, аналогічних функціям руки людини при переміщенні об'єктів в просторі, оснащене робочим органом.
автоматична машина, стаціонарна або пересувна, така, що складається з виконавчого пристрою у вигляді маніпулятора, що має декілька ступенів рухливості
служить для сприйняття інформації про стан зовнішнього середовища
19. Виконавчий пристрій це …?
складова частина робота для формуванняі видачі керуючих дій виконавчому пристрою відповідно до програми
один або декілька механічних маніпуляторів, які складається з опорних конструкцій, маніпуляційної системи, робочих органів, приводів кінематичних пар з поступальними або обертальними переміщеннями маніпуляційної системи, приводів пристроїв пересування і робочих органів
керований пристрій для виконання рухових функцій, аналогічних функціям руки людини при переміщенні об'єктів в просторі, оснащене робочим органом
складова частина його виконавчого пристрою для безпосереднього виконання технологічних операцій і (або) допоміжних переходів
можливість цілеспрямованої дії робота на навколишнє середовище.
20. Що таке опорні конструкції і для чого вони призначені?
призначені для розміщення заготовок
призначені для розміщення всіх пристроїв і агрегатів ПР, а також для забезпечення необхідної міцності і жорсткості маніпуляторів. Опорні конструкції виконуються у вигляді підстав, корпусів, стійкий, рам, візків, порталів і т.п.
призначені для розміщення людини біля ПР
складова частина його виконавчого пристрою для безпосереднього виконання технологічних операцій і (або) допоміжних переходів
керований пристрій для виконання рухових функцій, аналогічних функціям руки людини при переміщенні об'єктів в просторі, оснащене робочим органом
21. Для чого призначена маніпуляційна система?
призначена для розміщення людини біля ПР
призначена для розміщення всіх пристроїв і агрегатів ПР, а також для забезпечення необхідноїміцності і жорсткості маніпуляторів.
призначена для перенесення і орієнтації робочого органу або об'єкту маніпулювання в заданій точці робочої зони і є багатоланковим просторовим механізмом з розімкненим кінематичним ланцюгом, визначає форму і об'єм робочої зони ПР, а також характер рухів робочого органу
призначена для розміщення опорних конструкції виконуються у вигляді підстав, корпусів, стійкий, рам, візків, порталів
призначена для розміщення людини біля ПР
22. Що відображає структурна схема?

механізм повороту ПР
вібраційний ПР
механізм переміщення ПР
механізм адаптації
механізм програмування
23. Що таке механізм ПР?
сукупність кронштейнів
сукупність рухомо з’єднаних твердих тіл (ланок), що здійснюють під дієюприкладених сил певні доцільні рухи
сукупність параметрів
сукупність механізмів програмування
сукупність механізмів повороту ПР
24. Для чого призначені приводи кінематичних пар маніпуляційної системи і робочого органу маніпулятора?
для механізмів програмування ПР
для сенсорних механізмів ПР
для утримання кінематичних пар
для утримання кронштейнів
для виконавчих механізмів ПР
25. Кінематичний ланцюг це …?
Система механізмів програмування
Система механізмів переміщення
Система приводів
Система ланок, сполучених між собою кінематичними парами
Система кронштейнів
26. Еквівалентом чого є показаний на рисунку механізм?

еквівалентом металорізального верстата
еквівалентом руки людини - механізм здатний виконувати ту ж сукупність рухів і це є промисловий робот з шістьма основними, і одній додатковій (забезпечує рух губок захватного пристрою) ступенями рухливості
еквівалентом вимірювального пристрою
еквівалентом програмної системи
еквівалентом механізму затиску
27. Що показано на рисунку?

кардан автомобіля
вузли автомобіля
важільні системи
кінематичні пари
деталі машини
28. Що приведено на рисунку?

привод вібраційного ПР
модель перколятора
суматор
пневмокамеру
затискний пристрій ПР
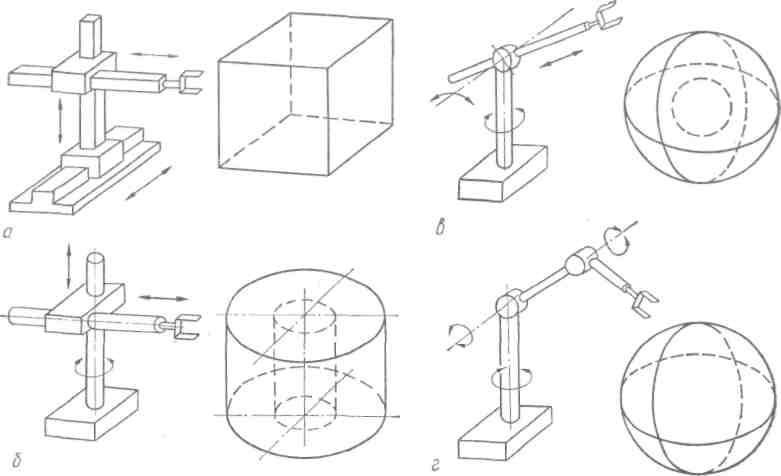
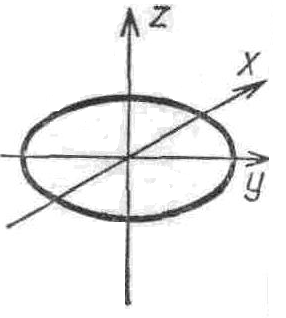
29. В якій системі координат працює зображений ПР?

сферична
симетрична
прямокутна
ангулярна
циліндрична
30. В якій системі координат працює зображений ПР?

сферична
циліндрична
ангулярна
прямокутна
симетрична
31. В якій системі координат працює зображений ПР?

сферична
циліндрична
ангулярна
прямокутна
симетрична
32. В якій системі координат працює зображений ПР?
сферична
циліндрична
ангулярна
прямокутна
симетрична
33. Які рухи використані в зображеному ПР?

О.О.О.О
О.П.О.П
П.П.П.О
О.П.О.П.П
П.П.П.О.О
34. Як називається наведений принцип побудови ПР?

модульний
циліндричний
сферичний
прямокутний
симетричний
35. Що є модулем ПР?
це система програмування
це конструктивно і функціонально незалежна одиниця, що містить як звичайні приводні пристрої і механізми, так і енергетичні і інформаційні комунікації. Модуль може забезпечувати одну або декілька ступенів рухливості робота
це система транспорту
це система кінематичних пар
це система важелів
36. В якій системі де проводиться поворот схвату зображених ПР маємо найбільше число ступенів його рухливості?

а) і б)
е)
д) і г)
в)
д)
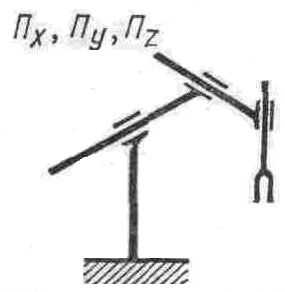
37. СхемаПР?

маніпуляторна
адаптивна
комбінована
сферична
прямокутна
38. Система приводів ПР?

пневматична
електрична
комбінована
гідравлічна
сенсорна
39. Схема компоновки ПР?

сферична
циліндрична
ангулярна
прямокутна
симетрична
40. Схема компоновки ПР?

прямокутна
симетрична
сферична
циліндрична
ангулярна
41. Схема компоновки ПР?

сферична
важільна
ангулярна
прямокутна
симетрична
42. Схема компоновки ПР?

прямокутна
симетрична
сферична
прямокутна
ангулярна
43. Схема компоновки ПР?

сферична
горизонтальна
ангулярна
прямокутна
симетрична
44. Схема компоновки ПР?

сферична
прямокутна
симетрична
портальна
ангулярна
45.
Робоча областьПР типу

 ?
?



 +
+

46. Робоча
область ПР типу 
 ?
?

 √
√


47. Робоча
область ПР типу 
 ?
?



 √
√

48. Робоча
область ПР типу 
 ?
?

 √
√



49. Робоча
область ПР типу 
 ?
?



 +
+

50. Робоча
область ПР типу 
 ?
?

 √
√



51. Робоча область ПР типу 
 ?
?



 √
√
52. Робоча область ПР типу 
 ?
?

 √
√



53. Робоча область ПР типу

 ?
?



 √
√

54. Робоча область ПР 
 ?
?

 √
√



55. Робоча область ПР типу 
 ?
?

 √
√

56. Робоча область ПР типу 
 ?
?

 √
√



57. Що потрібно врахувати при виборі типу схвату?
програму випуску деталей
властивості об’єкта маніпулювання, масу, форму і її зміна в процесі обробки на технологічному устаткуванні, вимоги до часу захвату і точності утримування, властивості захоплюваної поверхні
освітлення на дільниці цеху
наявність огорожі
шлях руху ПР
58. Як вибирають тип приводу ПР?
по умові його широкого використання
по розрахунку
виходячи з моделі верстату
виходячи з елементної бази, наявності енергоносія, вимог виробництва
виходячи з від кількості супортів верстату
59. Як визначають зусилля в кінематичних елементах схвату ПР?
виходячи з моделі верстата
виходячи з кінематичного аналізу, прикладаючи до губок схвату зусилля затиску заготовки
виходячи з типу приводу
виходячи з від кількості супортів верстату
по розрахунку
60. Із чого виходять при визначенні зусилля захвату ПР?
виходячи з моделі верстата
виходячи з від кількості супортів верстату
із наявності сил інерції