

Зацерковний В.І. та ін. ГІС та бази даних
.pdfНа четвертому рівні, фізичному, описується організація конкретної структури бази даних, яка є унікальною для кожного проекту.
Рис. 6.1. Рівні організації даних у ГІС
ГІС має зберігати передусім базові дані та дані, специфічні для конкретної ГІС. Усі дані зберігаються в базах даних, які можна умовно розділити на такі типи:
а) база геоданих – це просторова база даних, що містить набори даних, що відображають геоінформацію в контексті загальної моделі даних ГІС. До цих даних відносяться векторні об’єкти та зображення, растри, топологія, мережі, тривимірні об’єкти, а також усі об’єкти, що входять до складу тематичних шарів і є однією зі складових моделі даних;
б) база геовізуалізації – це набір карт й інших видів, які показують просторові об’єкти та функціональну взаємодію між об’єктами на земній поверхні. В цій базі можуть бути побудовані як різні види карт, так "вікна в базу даних" для підтримки запитів, аналізу та редагування інформації; в) тип геообробки ГІС – це інструментарій для одержання нових
наборів геоданих із наявних наборів даних.
Функції просторових даних отримують інформацію з наборів даних, застосовують до них аналітичні функції і записують одержані результати в нові похідні набори даних. Прикладом може слугувати певний тематичний шар, для створення якого було відібрано дані інших тематичних шарів.
231

6.2. Організація та обробка інформації в ГІС
Будь-яка ГІС володіє розвиненими засобами обробки й аналізу вхідних даних із метою подальшої їх реалізації у речовій формі. На рис. 6.2 представлена схема обробки інформації в ГІС.
Рис. 6.2. Підходи щодо організації обробки інформації в ГІС
На першому етапі відбувається збір як географічної (цифрові карти, зображення), так і атрибутивної інформації. Зібрані дані групуються в двох базах даних. Перша БД зберігає картографічні (просторові) дані, друга ж – наповнюється атрибутивною інформацією.
На другому етапі система обробки просторових даних звертається до баз даних для проведення обробки й аналізу затребуваної інформації. При цьому весь процес контролюється системою керування баз даних (СКБД), за допомогою якої можна здійснювати швидкий пошук табличної та статистичної інформації.
Зазвичай, основним результатом роботи ГІС є різноманітні карти. Для організації зв’язку між просторовою (географічною) й атрибутивною інформацією використовують чотири підходи взаємодії.
Перший підхід – геореляційний або, як його ще називають, гібридний. При такому підході організація просторових і атрибутивних даних відбувається різним чином. Між двома типами даних зв’язок здійснюється за допомогою ідентифікатора об’єкта. Просторова інформація зберігається окремо від атрибутивної у своїй БД. Атрибутивна інформація організована в таблиці під управлінням реляційної СКБД.
Характеризуючи призначення ідентифікатора, зауважимо, що це один із основних параметрів, який бере участь у структуруванні даних. Його призначення – це визначення певних ознак, інформації про об’єкт, що може динамічно змінюватися, незважаючи на статичність цього об’єкта.
232

Кожний об’єкт має містити власні атрибути, у яких визначаються базові властивості (наприклад, площа, об’єм, маса, швидкість тощо). Оскільки кожний об’єкт може бути як окремим елементом одного з тематичних шарів, так і конкретним шаром, то потрібна чітка прив’язка до простору та часу. Для моделювання складної ГІС недостатньо мати інформацію лише про структуру та позицію об’єкта.
Другий підхід називається інтеграційним. При ньому передбачається використання засобів СКБД для збереження як просторової, так і атрибутивної інформації, тобто ГІС виступає як надбудова над СКБД.
Третій підхід називають об’єктним. У об’єктно-орієнтованій моделі акцент робиться на положення об’єктів у певній складній ієрархічній системі класифікації та на взаємовідносинах між об’єктами.
Приклад ієрархічної класифікації представлений на рис. 6.3.
Рис. 6.3. Приклад ієрархічної класифікації
Позитивні моменти цього підходу полягають у легкості опису складних структур даних і взаємовідношень між об’єктами. Об’єктний підхід дозволяє вибудовувати ієрархічні ланцюги об’єктів і вирішувати різноманітні задачі моделювання.
Сучасні об’єктно-орієнтовані ГІС працюють із цілими класами та сімействами об’єктів, які дозволяють користувачу одержувати більш повне уявлення про властивості цих об’єктів і притаманні їм закономірності.
Останнім часом все більше застосовується об’єктно-реляційний підхід, який є синтезом першого та третього підходів.
Переваги цифрового подання просторових даних:
–легко копіювати;
–передаються з великою швидкістю;
–менше схильні до фізичного зносу;
–легко трансформувати, обробляти, аналізувати;
–можна робити те, чого неможливо робити з паперовими картами, а саме: швидко і точно робити виміри, комбінувати, масштабувати та панорамувати.
233

VIІ. РАСТРОВІ МОДЕЛІ ПОДАННЯ ПРОСТОРОВИХ ДАНИХ
7.1. Принципи побудови растрових моделей
Для опису реальних об’єктів у програмному середовищі ГІС використовується модель просторових даних, тобто спосіб цифрового опису просторових об’єктів, який містить інформацію про їхнє розміщення і властивості, просторові та непросторові атрибути.
Для подання просторових даних у ГІС використовують растрові та векторні структури даних (рис. 7.1).
Рис. 7.1. Просторове подання даних у ГІС
234

Структура просторових даних – це фізичний спосіб кодування параметрів об’єктів, що використовується для їх збереження й аналізу.
Растрова модель даних (Raster Geographic Data Model) історично є першою моделлю даних геоінформатики, де дискретизація безперервного простору здійснюється найпростішим способом – увесь об’єкт (досліджувана територія) розбивається на просторові комірки, які утворюють регулярну сітку або матрицю (набір дискретних об’єктів).
Растрові зображення нагадують аркуш паперу в клітинку, на якому кожній клітинці відповідає однакова за розмірами, але різна за характеристиками (колір, щільність тощо) ділянка поверхні геооб’єкта (рис. 7.2).
Рис. 7.2. Формування растрової моделі
Найменший неподільний елемент растрової моделі, залежно від способу завдання, називають пікселем або коміркою (чарункою).
Піксель (англ. pixel – picture element) – найменший елемент поверх-
ні візуалізації, що отримують у результаті дискретизації – розбивки на неподільні елементи – дискрети (комірки або точки растру), завдяки якому можуть бути незалежним чином визначені колір, інтенсивність та інші характеристики об’єкта дослідження.
Комірка (cell) – одиниця інформації про географічний простір.
Для подання цифрових тривимірних зображень використовується тривимірний аналог пікселя – воксель (voxel – volume element).
235

Упорядкована сукупність комірок утворює растр, який є моделлю карти або геооб’єкта.
Растр (raster, tessellation) – набір даних, що мають географічний
характер, значення яких організовані в прямокутний масив об’єктів.
Растр утворений пікселями, представляє собою зображення (image). Відмінність між растровою моделлю та зображенням полягає в тому, що комірка першого зберігає фактично код об’єкта (процесу, явища),
а другого – величину яскравості.
Растрова модель даних (raster data model) – цифрове подання да-
них у вигляді сукупностей комірок растру (пікселів) з привласненням їм значень класу об’єкта.
Растрова модель складається з рядів комірок і колонок (стовпців) (рис. 7.3).
Рис. 7.3. Растрова модель
Кожна комірка растрової моделі має ширину dx (розмір по осі X) та висоту dy (розмір по осі Y). Комірки одного растру мають однакові розміри.
Положення кожної комірки можна описати координатами X (колонка), Y (рядок), іноді зі значенням координати висоти Z. Тематично кожна комірка растру (елемент зображення, піксель) може описувати певну властивість або ознаку відповідної їй географічної області, наприклад, крутизну схилу або висоту над рівнем моря, тип рослинності або ґрунту тощо.
236
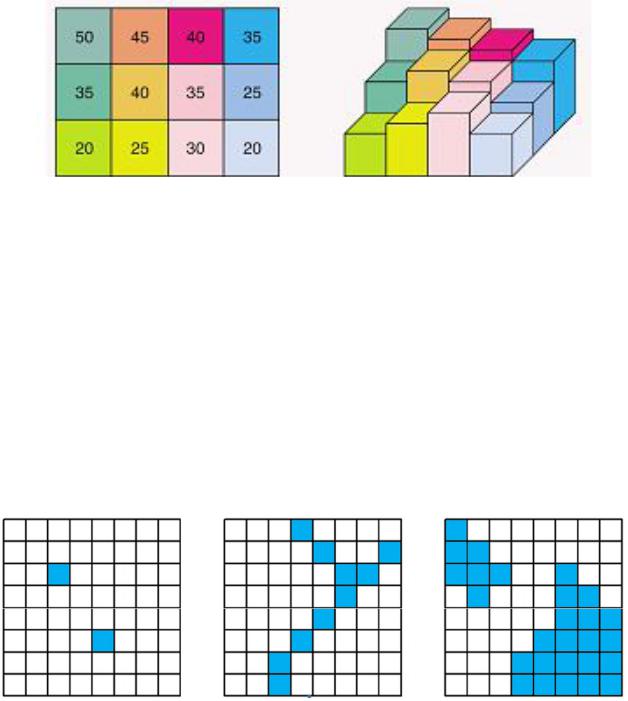
Поверхні подаються в вигляді регулярної матриці двовимірних комірок зі значенням висоти Z. Кожна комірка зберігає своє значення Z. Тривимірна растрова модель поверхні представляє собою сукупність суміжних блоків. Значення Z відображаються відповідним кольором (рис. 7.4).
Рис. 7.4. 2D і 3D растрове подання поверхні [19]
Растрове подання просторових об’єктів передбачає позиціонування точкових, лінійних і площинних об’єктів вказівкою їх положення в прямокутній матриці.
Точкові об’єкти подаються окремими комірками, що мають номер, координати й атрибути (рис. 7.5 а). Точковий 0-мірний об’єкт, що не має розміру, відображується двовимірною структурою, що має ширину і довжину.
Лінійні об’єкти (рис. 7.5 б) мають порядковий номер, набір (серію) координат, що формують лінію й атрибути.
Полігональні об’єкти (ареали, площі) подаються номером, групи координат, що формують площинний об’єкт і атрибути (рис. 7.5 в).
а |
б |
в |
Рис. 7.5. Подання географічних об’єктів растровими моделями:
а – точкові об’єкти; б – лінійні об’єкти; в – полігональні об’єкти (області)
Оскільки геооб’єкти у растровій моделі мають східчастий вигляд, то зрозуміло, що растрові структури даних не забезпечують точної
237

інформації про місце розташування, оскільки географічний простір поділений на дискретні осередки кінцевого розміру. Замість точних координат точок ми оперуємо з окремими комірками растру, до яких потрапляють ці точки.
Растрові способи формалізації просторових даних поділяють на:
–регулярні (правильні геометричні);
–нерегулярні (полігони Тиссена, діаграми Вороного-Дирихле, TINмоделі);
–вкладені (рекурсивні чи ієрархічні сітки (квадратомічні дерева), що повністю покривають досліджувану територію);
–безструктурні гіперграфові;
–решітчасті.
7.2. Растрові моделі на основі регулярних мереж
Растрові моделі на основі регулярних мереж (сіток) засновані на поділі досліджуваної території на комірки правильної форми у певній системі координат. При цьому, утворювана сітка (матриця) комірок будується на площині або об’ємній поверхні. Розміри комірок можуть бути різними й визначаються потрібною просторовою розрізненістю.
Область, що подається елементом растрової моделі може бути від декількох мікрон до десятків кілометрів, і має назву просторової розрізненості сітки. Більш висока розрізненість вимагає більшої кількості елементів, що утворюють певну область.
Регулярні мережі зазвичай бувають трьох типів: квадратні
(прямокутні) (рис. 7.6 а), трикутні (рис. 7.6 б) та шестикутні (рис. 7.6 в).
а |
б |
в |
Рис. 7.6. Регулярні мережі:
а – квадратні; б – трикутні; в – шестикутні (гексагональні)
Перевага квадратної мозаїки полягає в тому, що на сьогодні це найзручніша модель, оскільки дозволяє здійснювати обробку великих масивів даних.
238

Трикутна мозаїка більш гнучка ніж чотирикутна і краще підходить для моделювання тривимірних поверхонь. Саме це зумовило широке застосування трикутної мозаїки при моделюванні рельєфу в нерегулярних мережах, наприклад, у TIN (Triangulated Irregular Network) – моделі, яка використовується в пакеті ARC / INFO.
Шестикутна мозаїка подається правильними шестикутниками, в яких відстань між центрами всіх сусідніх комірок є постійною (еквідистантною), тоді як квадратні або прямокутні растри такої властивості не мають.
З точки зору растрової моделі, просторові об’єкти можна подати як сукупність атрибутів. Наприклад, сукупність атрибутів "болото" і "ліс" породжує об’єкт "ліс по болоту", сукупність атрибутів "номер", "вулиця", "колір" породжує об’єкт "будинок" тощо. Збереження атрибутів організовується у вигляді матриці, кожна комірка якої зіставляється з прямокутною областю простору. В кожній комірці записуються значення атрибута, наприклад, висота дерев, глибина річки. У найпростішому випадку в комірці просто вказується ознака наявності або відсутності об’єкта (рис. 7.7).
Рис. 7.7. Схема подання тематичних шарів растрової регулярної моделі
Кожен прямокутник має унікальний номер, що складається з позицій в стовпці (I) і рядку (J) матриці, що задає його положення відносно суміжних комірок.
239

Рис. 7.8. Координати комірок у "сітці" растрової моделі
З рис. 7.8 видно, що, знаючи координати першої комірки та номер стовпця (I), і рядка (J), можна легко перейти до координат будь-якої іншої комірки матриці:
X(I) = X(0) + I (N),
Y(J) = Y(0) + J (M),
де M, N – розмір комірки в прийнятій системі координат.
Якщо в базі даних потрібно зберігати більше одного атрибута, необхідно створити нову матрицю, в якій просторове положення комірок буде таким же, як і у вихідній матриці (рис. 7.9).
Рис. 7.9. Збереження даних у растровій моделі
240