

4. Порядок расчета рам методом перемещений
1. Определяется степень кинематической неопределимости рамы по формуле:
H = ny + nл, где
ny – число жестких узлов в стержневой системе;
nл – число возможных независимых линейных смещений концов стержней.
Для рамы, показанной на рис. 13 степень кинематической неопределимости будет:
, , .
2. Формируем основную систему метода перемещений путем введения фиктивных связей, препятствующих повороту жестких узлов и линейным смещениям концов стержней (рис. 14).
3. Запишем в общем виде систему канонических уравнений метода перемещений:
.
В нашем случае (для рассматриваемой рамы):
.
4. В основной системе метода перемещений построим эпюры изгибающих моментов от поочередного единичного смещения фиктивных связей () и заданной нагрузки ().
Построение эпюр и в большей степени формально, так как заключается в переносе на основную систему полученных ранее решений. Для рассматриваемой рамы на рис. 6.15 показаны соответствующие эпюры.
5. Определим коэффициенты канонических уравнений и .
Коэффициент представляет собой реакцию –й фиктивной связи от единичного смещения –й фиктивной связи.
Свободный член является реакцией в –й фиктивной связи от заданной нагрузки.
Для определения реактивного момента в –м фиктивном защемлении необходимо в соответствующей эпюре или вырезать –й узел с фиктивной связью и из условия равновесия находим искомую реакцию или .
Если найденная опорная реакция совпадает с направлением единичного перемещения связи – по часовой стрелке для защемления и слева направо для шарнирной опоры, то она считается
положительной.
Для рассматриваемой рамы определение опорных реакций показано на рис. 16.
Для определения реакций в фиктивных одностержневых опорах необходимо рассмотреть равновесие всей рамы или ее части при том или ином воздействии, предварительно определив, из соответствующих эпюр изгибающих моментов или, опорные реакции в действительных опорах или поперечные силы в сечениях.
Примеры определения коэффициентов , и и доказательства выполнения закона парности коэффициентов
показаны на рис. 1
6. Из решения канонических уравнений находим действительные смещения .
Окончательная эпюра изгибающих моментов строится путем сложения откорректированных эпюр с эпюрой :
.
8. Правильность эпюры устанавливается при помощи деформационной проверки:
, где
– эпюра изгибающих моментов в основной системе метода сил от единичного –го неизвестного.
9. По эпюре и заданной нагрузке строится эпюра поперечных сил с использованием уже известной формулы:
.
10. По эпюре Q из условий равновесия узлов найдем нормальные силы и построим эпюру N.
11. Правильность эпюр Q и N установим проверкой статического равновесия всей рамы.
20…. Канонические уравнения метода перемещений
Основная система метода перемещений отличается от заданной наличием дополнительных связей, препятствующих перемещениям узлов, появлениям реактивных моментов во введённых заделках и реактивных сил в добавленных опорных стержнях.
Канонические уравнения метода перемещений имеют статический смысл, который заключается в отрицании реактивных усилий (сил или моментов) во введённых добавочных связях по направлениям неизвестных перемещений (так как в заданной системе эти связи отсутствуют, см. рис. 12.6, 12.7).
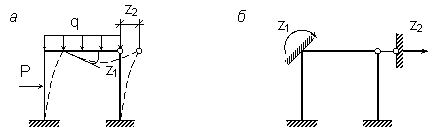
Рис. 12.6. Заданная система (а); основная система (б)

Рис. 12.7. Деформированные схемы рамы в основной системе от единичных перемещений и внешней нагрузки
Канонические уравнения:
R1 = 0, R1 = R11 + R12 + R10 = 0 – реактивный момент в первой введённой связи (заделке);
R2 = 0, R2 = R21 + R22 + R20 = 0 – реактивная сила во второй связи (опорном стержне),
где R11 – реакция в первой дополнительной связи от смещения первой связи; R12 – реакция в первой связи от смещения второй дополнительной связи; R10 – реакция в первой связи от внешней нагрузки; Rik – реакция в i-й дополнительной связи от смещения k-й связи; Ri0 – реакция в i-й дополнительной связи от внешней нагрузки,
Rik = rik zk,
где rik – реакция в i-й связи от смещения k-й связи на 1; zk – величина перемещения связи К.
Тогда канонические уравнения запишутся в виде:
![]()
Для системы n раз кинематически неопределимой канонические уравнения имеют вид:
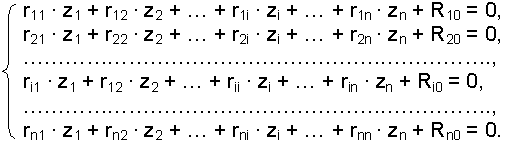
Входящие в канонические уравнения коэффициенты при неизвестных rik представляют собой реактивные усилия, возникающие в дополнительной связи i от единичного перемещения zk связи К. Свободные члены канонических уравнений Ri0 представляют собой реактивные усилия в связи i от внешней нагрузки.
Единичные rik и грузовые Ri0 реакции имеют положительный знак в том случае, если их направление совпадает с заданным направлением перемещения zi связи i.
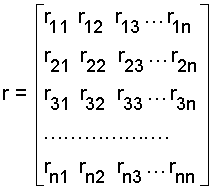
Коэффициенты при неизвестных образуют матрицу реакций системы:
 .
.
Свойства коэффициентов при неизвестных.
1. Коэффициенты, расположенные на главной диагонали и имеющие одинаковые индексы r11, r22, … rnn, называются главными. Главные коэффициенты всегда положительны и не равны нулю.
2. Коэффициенты, расположенные вне главной диагонали и имеющие разные индексы, называются побочными:
а) побочные коэффициенты обладают свойством взаимности rik = rik;
б) побочные коэффициенты могут быть положительными, отрицательными и равными нулю.