

1 (В частном случае, для простых задач, функции механизма настройки могут быть осуществлены вручную.)
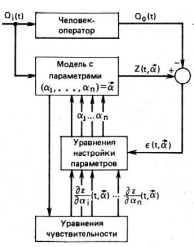
Рис. 7. Общая схема получения математической модели деятельности человека-оператора методом настройки параметров
Вид математической модели должен выбираться в зависимости от задачи слежения. В частном случае однокоординатного компенсаторного слежения вполне достаточным оказывается представление математической модели уравнением 2-го порядка (например, уравнением (10).
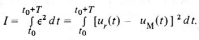
Функцию критерия качества обычно выбирают в виде среднеквадратического рассогласования
Способ настройки параметров устанавливается на базе алгоритмов оптимизации и может быть осуществлен посредством таких процедур, как процедура Гаусса - Зейделя, процедура градиента, процедура наискорейшего спуска, экстраполяционная процедура. При создании математического описания деятельности, как свидетельствуют результаты специальных исследований, целесообразно использовать процедуру наискорейшего спуска. Достоинство метода настройки параметров заключается в том, что при его использовании представляется возможным учесть в математическом описании нелинейность и изменение характеристик поведения человека во времени.
В ряде случаев настройка параметров в приемлемые сроки может быть выполнена вручную. Блок-схема для этого случая приводится на рис. 8 [40] . Человек-оператор отслеживает входной сигнал Z(р), индицируемый на осциллоскопе "И". На вход осциллоскопа "0" подаются два сигнала (соответственно на вертикальные и горизонтальные отклоняющие пластины). Один сигнал - реакция человека-оператора Y(р) на входной сигнал Z(р), а другой - реакция модели YM(р). При правильном подборе параметров Y(p)=YM(p) и на осциллоскопе "0" наблюдается прямая линия. В противном случае наблюдается эллипс. Недостатком описанной схемы является отсутствие законов варьирования параметров. Частично этот недостаток может быть скомпенсирован, если при определении параметров воспользоваться коэффициентами влияния. Коэффициенты влияния отсчитываются по вольтметру.
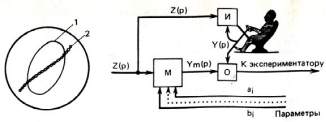
Рис. 8. Схема получения математической модели деятельности при настройке параметров вручную (по В. А. Тарану и Ю. Н. Кофанову). Индикация на осциллоскопе: 1 - при значительном рассогласовании с моделью; 2 - при совпадении с моделью
Оптимальные модели деятельности. Развитие теории оптимального управления (ТОУ) оказало существенное влияние на методологию математического моделирования деятельности. Особое значение ТОУ для моделирования состоит в том, что на основе ее методов можно получить модели деятельности человека-оператора в сложных многоконтурных системах управления, используя понятие состояния. Модели деятельности, создаваемые на основе методов ТОУ, мы определяем как оптимальные. Правомерность оптимальных моделей подтверждается данными многочисленных экспериментальных исследований, которые продемонстрировали тот факт, что при выполнении задач слежения человек действует в некотором смысле оптимально.
Следует отметить, что для построения оптимальных моделей привлекается очень сложный и громоздкий математический аппарат. Это не позволяет подробно и в строгой форме изложить в рамках данной работы имеющиеся методики построения оптимальных моделей. Поэтому в самом общем виде будет рассмотрена лишь одна возможная схема построения модели, вытекающая из результатов теории оптимальных оценок.
Рассмотрим контур управления с участием человека, показанный на рис. 9. Как известно, построение любой модели связано с учетом некоторых ограничений. В данном случае мы полагаем, что человек вводит некоторую задержку во времени, связанную со зрительными процессами, обработкой в ЦНС и т, д., запаздыванием в нервно-мышечной системе, которое по мнению ряда авторов, достаточно хорошо аппроксимируется выражением

. Изменение характеристик в зависимости от задачи управления и динамических свойств объекта представлено блоком H на рис. 9. Кроме того, мы полагаем, что при отображении на индикаторе переменной состояния человек будет воспринимать как эту переменную, так и ее первую производную1. При этом будет иметь место шум наблюдения Vy(t). Человеку может отображаться одно или несколько значений выхода системы, однако для простоты предположим, что он может осуществлять лишь одно управляющее воздействие u(t) с некоторым шумом Vu(t) (моторным). Специальные исследования показали, что Vyi(t),i=1,2,...,m и Vu(t) могут рассматриваться как белые гауссовы шумы.