

4) При изменении напряжения скорость можно регулировать в небольших пределах (максимум от sном до sк).
Например: по расчетам типового АД (p=3, nном=960 об/мин, Мс=const) уменьшение напряжения с U1ном до 0.7U1 приведет к уменьшению скорости на 6% (диапазон 1,04) и к уменьшению критического момента вдвое. То есть АД с кратностью максимального момента Мк/Мном< 2 даже такой диапазон реализовать не сможет [38].
|
Рис. 14. Механические характеристики при различном напряжении питания для АД с малым Rрц (а) и большим Rрц (б) [14]. |
Диапазон регулирования зависит от степени жесткости рабочего участка механической характеристики, которая определяется сопротивлением роторной цепи Rрц. Чем больше Rрц, тем больше диапазон регулирования [18]. Для получения достаточно большого диапазона регулирования скорости необходимо, чтобы активное сопротивление цепи ротора Rрц и соответственно критическое скольжение sк были, достаточно велики (рис. 14) [14].
|

Увеличение Rрц для достижения этой цели возможно в АД с фазным ротором путем включения в цепь ротора добавочного сопротивления Rдоб (со всеми вытекающими из этого недостатками) [18].
Кроме того, большим активным сопротивлением ротора обладает АД с массивным ротором, у которого sк >1.
Более высокий диапазон регулирования может быть обеспечен в замкнутых по скорости структурах асинхронного электропривода (рис. 16): 3...4 [40].
5) С уменьшением скорости (уменьшением напряжения) будет увеличиваться скольжение.
Увеличение скольжения вызовет увеличение потерь в роторе. Если пренебречь механическими потерями и потерями в стали ротора, то
ΔРэл2 = МΩ0s
В случае применения короткозамкнутого АД потери скольжения выделяются внутри машины, в беличьей клетке. Электродвигатель при этом перегревается, что может привести к преждевременному выходу его из строя.
3.13.2.2. Реализация
Изменение напряжения может быть произведено при помощи:
- регулировочных трансформаторов;
- реактивных катушек с выдвижным сердечником;
- переменных активных сопротивлений, включенных в цепь статора;
- при помощи магнитных усилителей;
- при помощи тиристорных регуляторов (рис. 15).
|
а)
б) Рис. 15. Схема и фазное напряжение АД при фазовом регулировании при помощи тиристорного регулятора напряжения [40]
|
Между выводами статора и фазами сети включаются тиристорные регуляторы: в каждую фазу – по два тиристора по встречно-параллельной схеме. Тиристоры проводят ток в течение соответствующего полупериода, после подачи на управляющий электрод импульса управления при положительном напряжении анод-катод. Когда тиристоры проводят ток – к фазе прикладывается напряжение сети. Блок управления (БУ) типа СИФУ (схема импульсно-фазового управления) обеспечивает сдвиг импульсов управления относительно момента естественной коммутации на угол α в функции внешнего сигнала управления. Закрывание тиристоров происходит естественно – при изменении полярности напряжения. Регулируя интервалы проводимости тиристоров в этой схеме, можно изменять действующее значение приложенного к двигателю напряжения [30]. |
|
а) |
б) |
|
Рис. 16. Схема (а) и механические характеристики (б) асинхронного электропривода с замкнутой по скорости структурой (штриховые линии)[40] |
|


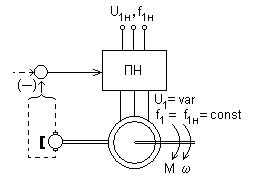

Тиристорные регуляторы напряжения (рис.16а), отличающиеся предельной простотой, доступностью элементной базы (тиристоры), малыми габаритами, высокой надежностью и низкой стоимостью [40].
Преобразователь напряжения (ПН) более простое и в 3-4 более дешевое устройство, чем преобразователь частоты, и именно эта особенность системы ПН-АД приводила в ряде случаев к её неоправданному применению [40].