

МВ65-1
.pdfМІНІСТЕРСТВО ОСВІТИ ТА НАУКИ УКРАЇНИ
КИЇВСЬКИЙ НАЦІОНАЛЬНИЙ УНІВЕРСИТЕТ ТЕХНОЛОГІЙ ТА ДИЗАЙНУ
ПРИКЛАДНА МЕХАНІКА
КУРСОВИЙ ПРОЕКТ
МЕТОДИЧНІ ВКАЗІВКИ ДО ВИКОНАННЯ РОЗРАХУНКІВ. ЧАСТИНА 1.
ДЛЯ СТУДЕНТІВ УСІХ СПЕЦІАЛЬНОСТЕЙ
Затверджено на засіданні кафедри
Інженерної механіки протокол №4
від 28.11.2010р.
КИЇВ КНУТД 2010
- 2 -
Прикладна механіка. Курсовий проект. Методичні вказівки до виконання розрахунків (частина1)/ Л.М.Березін, М.М.Рубанка, С.А.Кошель - К.: КНУТД, 2010 – 56 с. Укр. мовою.
Укладачі: Л.М.Березін М.М.Рубанка C.А.Кошель
ВСТУП Методичні вказівки призначені для систематизації та закріплення
теоретичних знань, узагальнення практичних навичок розрахунків деталей та складальних одиниць типових та найбільш поширених механізмів загального призначення за програмами «Прикладна механіка» та «Основи конструювання та проектування» для студентів усіх спеціальностей.
Застосування даних методичних вказівок дозволяє орієнтуватися в питаннях вибору електродвигуна, кінематичного та силового розрахунку привода, вибору матеріалів, розрахунку деталей на міцність, визначення геометричних параметрів зубчастих та черв'ячних передач редукторів, аналізувати сили в зачепленнях.
Скорочений об'єм викладання без пояснювального та описового тексту передбачає попереднє самостійне вивчення відповідного теоретичного матеріалу. Для зручності методичні вказівки складаються з розділів та підрозділів, що систематизує послідовність викладання розрахунку конкретної задачі та використовується для посилання на вихідні дані та результати попередніх розрахунків.
З метою уніфікації всі формули представлено в загальноприйнятих позначеннях. Розрахунки рекомендується виконувати в одиницях системи SI в відповідності до діючих стандартів, нормативів та довідкової літератури.
В таблицях додатків приведена інформація, яка необхідна для розрахунків у відповідності до завдань курсового проекту.
- 3 -
1. КІНЕМАТИЧНИЙ ТА СИЛОВИЙ РОЗРАХУНОК ПРИВОДУ
Обумовлений параметр та його |
Формули і вказівки до розрахунку |
|
позначення |
||
|
Вихідні дані
Момент обертання на вихідному Див. завдання валу приводу Т, Н·м
Частота обертання вихідного валу Див. завдання n, об/хв.
ПОСЛІДОВНІСТЬ РОЗРАХУНКУ
1.Складаємо кінематичну схему приводу
2.Визначаємо кутову швидкість вихідного валу ω, рад/с
3.Потужність електродвигуна, яка споживається Рcпож., кВт
4.Вибір електродвигуна
5.Асинхронна частота обертання
ротора електродвигуна nдв , об/хв.
6.Загальне передаточне число
uзаг
Див. ДСТУ і рисунок
ω= πn , де n – в об/хв.
30
Pспож. = P = T ×ω , Вт
η η
де P - потужність на вихідному валу приводу в кВт; Т – в кН·м (див. вихідні дані);
ω – в рад/с (див.п.2);
η– загальний ККД приводу;
η=η1 ×η2 ×η3 , де η1,η2 ,η3 - ККД передач, які складають привод
(вибирати за табл. 1) Електродвигун вибирати за потужністю за табл. 2, яка споживається, округляючи потужність до найближчого більшого значення
nдв = nc (1 − ξ ) , 100
де nc - синхронна частота
обертання в об/хв. ( див. табл.2); ξ - коефіцієнт ковзання (див.
табл.2)
uзаг = nдв , де nдв - див.п.5;
n
n - частота обертання вихідного валу приводу (див. вихідні дані)
- 4 -
7.Розбивка загального передаточного числа приводу
8.Потужності на валах P , кВт
9.Частота обертання валів n , об/хв.
u = u1 × u2 × u3 ,
де u1, u2 , u3 - передаточні числа
відповідних передач (див. склад приводу).
При розбивці загального передаточного числа необхідно врахувати, що передаточні числа зубчастих і черв'ячних передач стандартизовані.
Стандартні передаточні числа: - циліндричних зубчастих коліс (прямозубих і косозубих):
I ряд: 1; 1,25; 1,6; 2,0; 2,5; 2,15; 4,0; 5,0; 6,3; 8,0; 10,0;
II ряд: 1,12; 1,4; 1,8; 2,24; 2,8; 3,55;
4,5; 5,6; 7,1; 9,0; 11,2; - конічні зубчасті передачі:
I ряд: 1; 1,25; 1,60; 2,00; 2,50; 3,15; 4,0; 5,0; 6,30;
II ряд: 1,12; 1,40; 1,80; 2,24; 2,80;
3,55; 4,50; 5,60; - черв'ячні передачі:
I ряд: 8; 10; 12,5; 16; 20; 25; 31,5; 40; 50; 63; 80.
II ряд: 9; 11,2; 14; 18; 22,4; 28; 35,5;
45; 56; 71.
Першому ряду значень варто надавати перевагу над другим. Значення передаточних відношень інших передач:
-плоскопасова: 2...5, max 5;
-клинопасова: 2...6, max 6;
-ланцюгова: 2...5, max 6
Починати розрахунок з валу електродвигуна і послідовно переходити від валу до валу приводу:
P = P |
(див. п.3); |
|
1 |
спож. |
|
Р2 = Р1 ×η1 (див. п.3); Р3 = Р2 ×η2 (див. п.3) n1 = nдв (див. п.5);
- 5 -
|
|
n2 = n1 / u1 |
(див. п.7); |
|
|
|
||||||
|
|
n3 = n2 / u2 (див. п.7) |
|
|
|
|||||||
10. |
Кутова швидкість валів ω , рад/с |
ω = |
πn1 ; |
|
ω |
2 |
= ω1 ; |
ω |
3 |
= ω2 |
||
|
|
1 |
30 |
|
|
|
u1 |
|
u2 |
|||
|
|
|
|
|
|
|
|
|
||||
11. |
Моменти обертання на валах |
T = |
|
P |
|
|
|
|
|
|
|
|
T , Н·м |
|
1 |
, |
де P - в Вт (див.п.3); |
||||||||
|
||||||||||||
1 |
ω1 |
|
|
1 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||
T2 = T1 ×u1 ×η1; T3 = T2 ×u2 ×η2
Результати розрахунків за пунктами 8...11 звести в таблицю
ПРИКЛАД. ВИБІР ЕЛЕКТРОДВИГУНА, КІНЕМАТИЧНИЙ І СИЛОВИЙ РОЗРАХУНОК ПРИВОДА
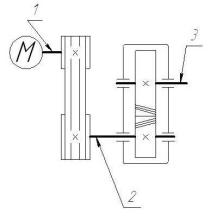
Спроектувати привод технологічної машини, що складається з електродвигуна, клинопасової передачі та одноступінчастого косозубого
циліндричного редуктора, якщо потужність на вихідному валу привода Р3 = 3,0 кВт, а частота обертання вихідного валу привода n3 = 55 об/хв.
Вихідні дані: потужність на вихідному валу привода Р3 = 3,0 кВт; частота обертання вихідного валу n3 = 55об/хв.
Розв'язування
1.Складаємо кінематичну схему привода та нумеруємо вали, починаючи
звалу електродвигуна (рис.1).
Рис.1 2. Визначаємо потужність, яка споживається електродвигуном. Загальний
ККД привода, який дорівнює добутку ККД послідовно з’єднаних передач привода: η = ηkn ×ηцр,
де ηкп , ηцр - ККД відповідно клинопасової передачі і циліндричного
одноступінчатого редуктора з урахуванням ККД підшипників. За табл.1 маємо
ηкп = 0,95 та ηцр = 0,97 .
- 6 -

Тоді η = 0,95 × 0,97 = 0,9215.
Потрібна потужність електродвигуна Р |
= |
Р3 |
= |
3,0 |
= 3,26 кВт. |
|
|
||||
cпож |
|
η |
0,9215 |
||
|
|
||||
3.За табл.2 вибираємо електродвигун типорозміром 4А100L4 з
найближчою більшою номінальною потужністю Рн = 4,0 кВт, коефіцієнтом ковзання ξ = 4,7 % і синхронною частотою обертання nc = 1500 об/хв. Асинхронна частота обертання ротора електродвигуна
n |
= n ×(1 - |
ξ |
) = 1500 ×(1 - |
4,7 |
) = 1429,5 об/хв. |
|
|
|
|||||
дв |
c |
100 |
100 |
|
||
|
|
|
||||
4. Визначаємо загальне передаточне число привода:
uзаг = nдв = 1429,5 = 25,99 , n3 55
де n3 - частота обертання вихідного валу.
Розподіляємо загальне передаточне число привода між його передачами, враховуючи, що uзаг = uкп ×uцр,
де uкп, uцр - передаточні числа відповідно клинопасової передачі та
циліндричного одноступінчатого редуктора. З |
ряду 1 стандартних значень |
|||||||||||||||||||||||
передаточних чисел для |
циліндричного косозубого одноступінчатого редуктора |
|||||||||||||||||||||||
приймаємо uцр = 8 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Тоді передаточне число клинопасової передачі |
|
|
|
|||||||||||||||||||||
uкп = |
uзаг |
= |
25,99 |
= 3,25 < 5 - максимально допустиме значення. |
||||||||||||||||||||
uцр |
|
|
||||||||||||||||||||||
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5. Знаходимо частоти обертання валів привода: |
||||||||||||||||||||||||
|
|
|
1-го: n1 = nдв = 1429,5 об/хв.; |
|
|
|
||||||||||||||||||
|
|
|
2-го: n |
2 |
= |
n1 |
= |
1429,5 |
= 439,85 об/хв.; |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
uкп |
3,25 |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
3-го: n = |
n2 |
|
= |
439,85 |
= 54,98 об/хв. |
|||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
3 |
|
uцр |
8 |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Визначаємо похибку: |
|
|
′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
n |
- n |
|
|
|
|
|
|
55 - 54,98 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
Dn |
= |
3 |
|
3 |
|
|
100% = |
|
|
|
|
|
|
100% = 0,04% < 4% , |
||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
3 |
|
|
|
n3 |
|
|
|
|
|
|
|
|
|
55 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
де n = 55 об/хв., n |
′ = |
54,98 об/хв. – задана та розрахункова частоти обертання |
||||||||||||||||||||||
3 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
вихідного валу привода відповідно; 4% - величина допустимої розбіжності. 6. Визначаємо кутові швидкості валів:
- 7 -

1-го: ω1 = π × n1 = 3,14 ×1429,5 = 149,62 рад/с; 30 30
|
2-го: ω2 |
= |
|
ω1 |
|
|
= |
|
149,62 |
|
|
= 46,04 рад/с; |
|
||||||
|
uкп |
|
|
3,25 |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
3-го: ω3 |
= |
ω2 |
|
|
= |
46,04 |
= 5,75 рад/с. |
|
||||||||||
|
uцр |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
||
|
7. Обчислюємо потужності на валах: |
|
|
||||||||||||||||
|
1-го: P = P |
|
|
|
|
= 3,26 кВт = 3,26 ×103 Вт; |
|
||||||||||||
|
1 |
|
|
cпож |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
2-го: P = P ×η |
кп |
= 3,26 × 0,95 = 3,1кВт = 3,1×103 Вт; |
||||||||||||||||
|
2 |
1 |
|
|
|
|
|
|
|
|
|
|
|||||||
|
3-го: P = P ×η |
цр |
= 3,1× 0,97 = 3,01кВт = 3,01×103 Вт. |
||||||||||||||||
|
3 |
2 |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Визначаємо похибку: |
|
′ |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
P - P |
|
|
|
|
|
|
|
|
3,0 - 3,01 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
DP = |
3 |
|
|
3 |
|
100% = |
|
|
|
|
|
100% = 1% |
< 4% , |
|||||
|
|
|
|
|
|
|
|
|
|
||||||||||
|
3 |
|
|
P3 |
|
|
|
|
|
|
|
|
|
|
3,0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
де P = 3,0 кВт, P ′ = 3,01 кВт – задана та розрахункова потужності на |
|||||||||||||||||||
3 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вихідному валу привода відповідно; 4% - величина допустимої розбіжності. 8. Знаходимо обертальні моменти на валах:
|
|
|
|
P |
|
|
3,26 ×103 |
|
|
|
3 |
|
|
|
|
|
||||
1-го: T = |
1 |
= |
|
|
|
|
|
|
= 21,79 Н·м = 21,79 ×10 |
|
Н·мм; |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
1 |
ω1 |
|
|
149,62 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
2-го: T |
= T × u |
кп |
×η |
кп |
= 21,79 ×3,25 × 0,95 = 67,28Н·м = 67,28 ×103 |
Н·мм; |
||||||||||||||
2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
3-го: T |
= T ×u |
цр |
×η |
цр |
= 67,28 ×8 × 0,97 = 522,09Н·м = 522,09 ×103 Н·мм. |
|||||||||||||||
3 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Результати розрахунків зводимо до таблиці. |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Показники |
|
|
|
|
Вал |
|
|
||||||
|
|
|
|
|
|
|
1 |
|
|
|
2 |
3 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Частота обертання n , об/хв. |
1429,5 |
|
439,85 |
54,98 |
|
|||||||||||||
|
|
Кутова швидкість ω , рад/с |
149,62 |
|
46,04 |
5,75 |
|
|||||||||||||
|
|
Потужність P , кВт |
3,26 |
|
|
3,1 |
3,01 |
|
||||||||||||
|
|
Обертальний момент T , Н·м |
21,79 |
|
|
67,28 |
522,09 |
|
||||||||||||
|
|
2. РОЗРАХУНОК ПРЯМОЗУБОЇ ЦИЛІНДРИЧНОЇ ПЕРЕДАЧІ |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
Обумовлений параметр та його |
|
|
Формули та вказівки |
|
||||||||||||||
|
|
|
|
|
|
|
позначення |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
Вихідні дані |
|
|
|
|
|
|
||
|
|
Передаточне число |
|
|
|
Значення uцр - див. |
|
|
||||||||||||
- 8 -

циліндричної передачі uцр |
кінематичний розрахунок |
Моменти обертання, Н·м: |
|
- шестерні T1 ; |
Значення T1 та T2 - див. |
- на зубчастому колесі T2 |
кінематичний розрахунок |
Кутова швидкість шестерні ω1 , |
Значення ω1 - див. |
рад/с |
кінематичний розрахунок |
ПОСЛІДОВНІСТЬ РОЗРАХУНКУ |
|
1. Вибір матеріалу шестерні та |
Вибрати: для шестерні сталь45, |
колеса |
термічна обробка – поліпшення, |
|
твердість НВ 230; |
для колеса – сталь 45, термічна обробка – поліпшення, твердість НВ
2.Допустимі контактні напруження [σ H ] , Мпа для шестерні та колеса
3.Допустиме контактне напруження для прямозубої циліндричної передачі [σ H ],МПа
4.Коефіцієнт, що враховує нерівномірність розподілу навантаження по ширині вінця K Hβ
200
[σ H |
] = |
σ H lim в× K HL |
, |
|
|||
|
|
[SH ] |
|
де σ H lim в - границя контактної
витривалості при базовому числі циклів(σ H lim в = 2НВ + 70 );
K HL = 1- коефіцієнт довговічності; [SH ] = 1,10 - коефіцієнт безпеки. Для шестерні -
[σ ] = (2HB1 + 70)K HL =
H1 [SH ]
= (2 × 230 + 70)×1 = 482 МПа. 1,1
Для колеса -
[σ ] = (2HB2 + 70)K HL =
H 2 [SH ]
= (2 × 200 + 70)×1 = 428 МПа 1,1
Вибрати найменше з розрахованих значень напружень
[σ H 2 ] = [σ H ] = 428 МПа
Попередньо прийняти в залежності від розташування зубчастих коліс відносно опор:
- при симетричному
K Hβ = 1,0...1,15 ;
- 9 -

5.Коефіцієнт ширини вінця по міжосьовій відстані ψ ва
6.Міжосьова відстань aW , мм
7. Коловий модуль зачеплення mt , мм
8.Сумарне число зубів ZΣ передачі
-при несиметричному
K Hβ = 1,1...1,25 ;
-при консольному
KHβ = 1,2...1,35
Приймати для прямозубих коліс
ψ ва = b = 0,125...0,25
аW
З умови на контактну міцність активних поверхонь зубців
aW = |
Ka (uцр + 1)3 |
T2 K Hβ |
, |
||||
[σ H |
]2 uцр2 ψ ва |
||||||
|
|
|
|
|
|||
де Ka = 49,5; |
|
|
|
||||
T2 – в Н·мм (див. вихідні дані); |
|
||||||
[σ |
H |
] |
- в МПа( див. п.3); |
|
|||
|
|
|
|
|
|
||
КНβ - див. п.4;
ψва - див. п. 5.
Отримане значення aW уточнити
по ДСТУ 2185-66 з стандартного ряду:
1 ряд: 40, 50, 63, 80, 100, 125, 160, 200, 250, 315, 400, 500, 630, 800, 1000 2 ряд: 71, 90, 112, 140, 180, 224,
280, 355, 450, 560, 710, 900
mt = (0,01...0,02)aW ,
де aW – уточнене стандартне значення.
З отриманого інтервалу вибрати модуль mt з стандартного ряду по
ДСТУ 9563-60:
1 ряд: 1; 1,5; 2; 2,5; 3; 4; 6; 8; 10; 12; 16; 20.
2 ряд: 1,25; 1,375; 1,75; 2,25; 2,75; 3,5; 4,5; 5,5; 7; 9; 11; 14; 18.
Z Σ = 2aW mt
- 10 -
9.Число зубів:
-шестерні Z1
-колеса Z2
10.Уточнене передаточне число uцр′
11.Перевірка міжосьової відстані aW , мм
12.Основні параметри шестерні та колеса, мм:
-діаметри ділильні:
шестерні d1 ; колеса d 2 ;
-діаметри вершин зубів:
шестерні da1 ;
колеса da2 ;
- діаметри впадин зубів:
Z1 = |
Z∑ |
|
. |
|
uцр + 1 |
||||
|
|
|||
uцр - див. вихідні дані.
Значення Z1 округляти до найближчого цілого числа
( Z1min = 17)
Z2 = ZΣ − Z1.
Значення Z2 округляти до найближчого цілого числа
uцр′ = Z2 .
Z1
Z1, Z2 - округлені значення. Перевірити розбіжність
u = uцр − uцр′ 100% ≤ 2,5% при
uцр
uцр ≤ 4,5;
u = uцр − uцр′ 100% ≤ 4% -
uцр
при uцр> 4,5; uцр - див. вихідні дані
aW = 0,5( Z1 + Z2 )mt .
Отримане значення aW порівняти з прийнятим по ДСТУ (див. п.6)
d1 = mt Z1; d2 = mt Z2 ;
da1 = d1 + 2mt ; da2 = d2 + 2mt ;
- 11 -