

Краткая теория эксперимента
П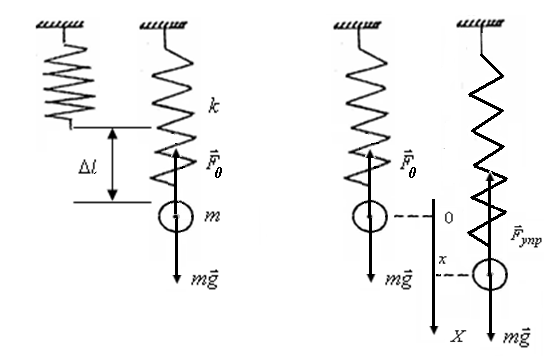 римером
свободных незатухающих гармонических
колебаний могут служить колебания
груза, подвешенного на абсолютно упругой
пружине и совершающего колебания под
действием упругой силы.
римером
свободных незатухающих гармонических
колебаний могут служить колебания
груза, подвешенного на абсолютно упругой
пружине и совершающего колебания под
действием упругой силы.
Рис.1 Рис.2
Рассмотрим груз массой m, подвешенный на пружине жесткостью k (рис.1). Под действием этого неподвижно висящего груза пружина оказывается растянутой на величину l (рис.1, l – статическое растяжение пружины).
При статическом
равновесии в нагруженном состоянии
(рис.1) сила тяжести груза ![]() уравновешивается
силой упругости растянутой пружины
уравновешивается
силой упругости растянутой пружины
![]() ,
т. е. для статического равновесия:
,
т. е. для статического равновесия:
![]() .
.
По закону Гука величина силы упругости растянутой или сжатой пружины прямо пропорциональна величине растяжения (или сжатия), т. е.
![]() где
где
k – коэффициент упругости или жесткость пружины.
Тогда, для статического равновесия: k·Δl=mg.
При смещении
груза из положения равновесия маятника
на величину х
(рис. 2) баланс сил тяжести и упругости
нарушается. Приращение силы упругости
определит величину равнодействующей
силы ![]() ,
направленной вдоль оси ОХ
(рис. 2).
Проекция вектора силы
,
направленной вдоль оси ОХ
(рис. 2).
Проекция вектора силы ![]() на ось ОХ:
на ось ОХ:
![]() .
.
Таким образом,
движение колеблющегося тела будет
происходить вдоль оси ОХ под действием
силы ![]() , и тогда,
согласно второму закону Ньютона,
уравнение динамики движения груза
вдоль оси ОХ будет иметь вид:
, и тогда,
согласно второму закону Ньютона,
уравнение динамики движения груза
вдоль оси ОХ будет иметь вид:
![]()
где
 .
.
Решением этого дифференциального уравнения является гармоническая функция x(t):
![]() ,
где
,
где
х(t) – смещение, то есть отклонение колеблющегося тела от положения равновесия в момент времени t;
![]() – амплитуда гармонического колебания
(максимальное отклонение колеблющегося
тела от положения равновесия);
– амплитуда гармонического колебания
(максимальное отклонение колеблющегося
тела от положения равновесия);
0 – круговая (циклическая) частота колебаний, связанная с периодом колебаний Т и частотой колебаний следующими соотношениями:
![]()
![]() – фаза
колебания, определяющая часть полного
колебания, прошедшего к моменту времени
t;
– фаза
колебания, определяющая часть полного
колебания, прошедшего к моменту времени
t;
0 – начальная фаза колебаний, то есть фаза колебания в начальный момент времени (t=0).
Так как круговая
частота колебаний пружинного маятника
![]() , то период колебаний пружинного
маятника:
, то период колебаний пружинного
маятника:
Из статического равновесия следует, что
![]()
Тогда выражение для периода колебаний пружинного маятника может быть записано в виде:
В проверке этой формулы заключается экспериментальная часть данной лабораторной работы.
. Порядок выполнения работы
1. Подвесьте к
пружине груз массой
![]() и определите статическое смещение конца
пружины. Проделайте то же
самое,
подвешивая
последовательно дополнительные грузы
так, чтобы общая масса груза была равна
и определите статическое смещение конца
пружины. Проделайте то же
самое,
подвешивая
последовательно дополнительные грузы
так, чтобы общая масса груза была равна
![]() и
и
![]() . Результаты
измерений ∆l1
, ∆l2
, ∆l3
занесите
в таблицу.
. Результаты
измерений ∆l1
, ∆l2
, ∆l3
занесите
в таблицу.
Таблица.
|
Масса груза m, кг |
Статическое смещение l, м |
Теоретическое значение периода Ттеор , с |
Время N колебаний t1 , с |
Время N колебаний t2 , с |
Время N колебаний t3 , с |
Среднее время N колебаний tср , с |
Экспериментальное значение периода Тэксп , с |
Относительное отклонение Т , % |
Среднее относительное отклонение Т , % |
|
0,1 |
|
|
|
|
|
|
|
|
|
|
0,2 |
|
|
|
|
|
|
|
| |
|
0,3 |
|
|
|
|
|
|
|
|
2. По проверяемой формуле рассчитайте Ттеор. – теоретические значения периода колебаний. Результаты занесите в таблицу.
3. Определите Тэксп – экспериментальные значения периода колебаний.
Для этого в каждом опыте, подвешивая грузы (сначала m1, а затем m2 и m3) и давая им возможность свободно колебаться, определите время нескольких
(N = 20 – 30) колебаний.
Каждый опыт
проделайте по три раза, вычисляя tср
– среднее
время N
коле-баний (![]() ),
и найдите экспериментальные значенияТэксп
:
),
и найдите экспериментальные значенияТэксп
:
![]()
Результаты занесите в таблицу.
4. Найдите и занесите в таблицу в каждом из трех опытов Т – относительное отклонение экспериментального результата от теоретического, используя выражение:
![]() .
.
5. Найдите среднее относительное отклонение Тср.
![]() .
.
6. Сделайте вывод о причинах расхождения Тэксп и Ттеор.