

MPT_UP4_end_ZEI
.pdfРис. П2.1. Характеристика тахогенератора
Рис. П2.2. Влияние насыщения на изменение магнитного потока
110
В начальной части характеристики заметно сказывается непостоянство сопротивления скользящего контакта, поэтому в тахогенераторах целесообразно применять щетки с малым переходным сопротивлением.
Существенное влияние на работу тахогенератора может оказать изменение тока возбуждения под влиянием нагревания обмотки или колебания напряжения источника независимого возбуждения. На рис. П2.2 показано изменение магнит-
ного потока, обусловленное одинаковым приращением тока ∆Iв в насыщенной
(∆Ф') и ненасыщенной (∆Ф'') части характеристики намагничивания. Для уменьшения влияния изменения тока возбуждения на величину магнитного потока магнитную цепь тахогенератора следует делать насыщенной. Если же по условиям работы требуется сохранить пропорциональность между напряжением тахогенератора и током возбуждения, магнитную цепь делают ненасыщенной.
На рис. П2.3 приведена схема лабораторной установки для исследования тахогенератора постоянного тока. Передняя (приборная) панель стенда “Генератор постоянного тока” приведена на фотографии, представленной на рис. В1 (с. 8).
Существенным преимуществом тахогенераторов с постоянными магнитами является отсутствие источника энергии для возбуждения. Современные материалы для постоянных магнитов – сплавы типа альнико, магнико и др. – обладают стабильными магнитными свойствами и обеспечивают надежную работу тахогенераторов в течение продолжительного времени.
111

Рис. П2.3 Схема лабораторной установки для исследования
тахогенератора постоянного тока
112
РАБОТА № 2
ИССЛЕДОВАНИЕ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА С ПАРАЛЛЕЛЬНЫМ ВОЗБУЖДЕНИЕМ
Оглавление
1.Цель работы …………………………………………….………... 115
2.Программа работы ………………………………………………. 115
3.Основы теории…………...…………………………………... 116
3.1.Общие положения …………………………………………... 116
3.2.Энергетическая диаграмма …………………………………. 116
3.3.Уравнение равновесия вращающих моментов ……………. 119
3.4.Уравнение равновесия напряжений ………………………... 121
3.5. Скоростная и механическая характеристики ……………… |
122 |
3.6. Пуск двигателей постоянного тока ………………………… |
123 |
3.7. Устойчивость работы двигателя …………………………… |
127 |
3.8.Изменение режима работы …………………………………. 130
3.9.Способы регулирования частоты вращения двигателя …... 133
3.10. Характеристики двигателей параллельного возбуждения |
134 |
3.10.1. Естественные скоростная и механическая |
134 |
характеристики …………………………………….. |
|
3.10.2. Регулирование скорости двигателей |
137 |
параллельного возбуждения ………………………. |
3.10.2.1.Регулирование скорости ослаблением магнитного потока ……………………….. 137
3.10.2.2.Регулирование скорости сопротивлением в цепи якоря, искусственные
механическая и скоростная характеристики …………………………... 138
3.10.2.3.Регулирование скорости изменением напряжения якоря ………………………... 140
3.10.3.Рабочие характеристики …………………………... 141
113
3.11. Характеристики двигателей последовательного |
143 |
возбуждения ……………………………………………….. |
|
3.11.1. Естественные скоростная и механическая |
143 |
характеристики. Область применения …………… |
3.11.2.Регулирование скорости двигателей последовательного возбуждения …………………... 144
3.12. Характеристики двигателей смешанного возбуждения … |
146 |
3.13. Отключение двигателя от сети и торможение …………… |
148 |
4. Экспериментальное исследование ……………………... |
150 |
4.1. Пуск и реверс двигателя ……………………………………. |
150 |
4.2. Рабочие характеристики …………………………………… |
150 |
4.3.Скоростная (электромеханическая) характеристика .……… 151
4.4.Регулировочная характеристика
(частота вращения n = const) ……………………………….. 152
4.5.Регулировочная характеристика
(момент M = const) ………………………………………….. 153
4.6. Определение кпд двигателя по методу отдельных потерь . 153
5.Содержание отчета …………….…………………...……………. 155
6.Контрольные вопросы ……..….…………………...……………. 155
Приложение
П1. Реакцияякоряиспособыулучшениякоммутациивдвигателе. |
159 |
П2. Управляемые двигатели постоянного тока …………………….. |
160 |
П3. Однофазный коллекторный двигатель …………………………. |
167 |
114
1. Цель работы
Изучить конструкцию и принцип действия двигателя с параллельным возбуждением, научиться осуществлять пуск двигателя и изменять направление его вращения, оценить влияние нагрузки на характеристики двигателя, познакомиться со способами регулирования частоты вращения и структурой потерь мощности.
2. Программа работы
2.1.Изучить устройство двигателя постоянного тока (ДПТ).
2.2.Собрать на лабораторном стенде схему для испытаний двигателя, осуществить пуск двигателя, изменить направление вращения.
2.3.Определить опытным путем номинальный ток возбуждения Iв.N двигателя, снять и построить рабочие характеристики двигателя
P1, M, Ia, n, η = f(P2) при Iв = Iв.N и U = UN.
2.4.Снять и построить скоростную (электромеханическую) характеристику двигателя n = f(Ia):
а) при Iв = Iв.N и U = UN,
б) при Iв = 0,5Iв.N и U = UN.
2.5.Снять и построить регулировочную характеристику двигателя при постоянной частоте вращения
Iв = f(M) при n = const и U = UN.
2.6.Снять и построить регулировочную характеристику двигателя при постоянном моменте на валу
n= f(U) при Mc = const и Iв = Iв.N.
2.7.Рассчитать коэффициент полезного действия двигателя для заданного значения тока якоря.
115
3. Основы теории
3.1. Общие положения
Двигатели постоянного тока благодаря наличию механического преобразователя частоты – коллектора обладают по сравнению с двигателями переменного тока важным достоинством – плавным и экономичным регулированием часто-
ты вращения. Поэтому двигатели постоянного тока находят широкое применение в промышленных, транспортных и других установках, где требуется широкое и плавное регулирование частоты вращения (прокатные станы, мощные металлорежущие станки, электрическая тяга на транспорте и т.д.).
В режиме двигателя коллектор (термин 17, с.10) преобразует потребляемый из внешней цепи постоянный ток в переменный ток в обмотке якоря и работает, таким образом, в качестве механического инвертора тока.
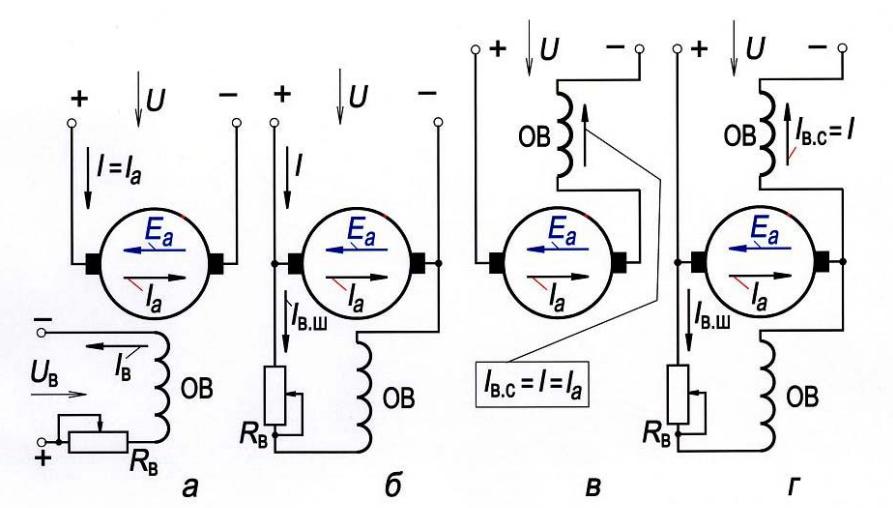
По способу возбуждения двигатели постоянного тока подразделяются аналогично генераторам на двигатели независимого, параллельного, последовательного и смешанного возбуждения (рис. 2.1).
С независимым возбуждением от отдельного источника тока обычно выполняются мощные двигатели с целью более удобного и экономичного регулирования тока возбуждения. По своим свойствам двигатели независимого и параллельного возбуждения почти одинаковы (термины 32…39, с.11, 12).
3.2. Энергетическая диаграмма
На рис. 2.2 изображена энергетическая диаграмма двигателя параллельного возбуждения, которая иллюстрирует процесс преобразования электрической мощности Р1, подводимой к двигателю из сети, в полезную механическую мощность Р2 на валу.
Р1 = Р2 + ∑ р, |
(2.1) |
где ∑ р – сумма потерь мощности, которые в двигателе преобразуются в тепло. Сумма потерь
∑ p = pв + pэл + pмг + pмх + pд, |
(2.2) |
где pв – электрические потери в обмотке возбуждения; pэл – электрические потери в обмотке якоря, компенсационной обмотке, обмотке добавочных полюсов и др., а также электрические потери под щеткой; pмг – магнитные потери в сердечнике якоря; pмх – механические потери на трение; pд – добавочные потери
(термины 90…96, с.17, 18).
116
117
Рис. 2.1. Схемы двигателей независимого (а), параллельного (б), последовательного (в) и смешанного (г) возбуждения
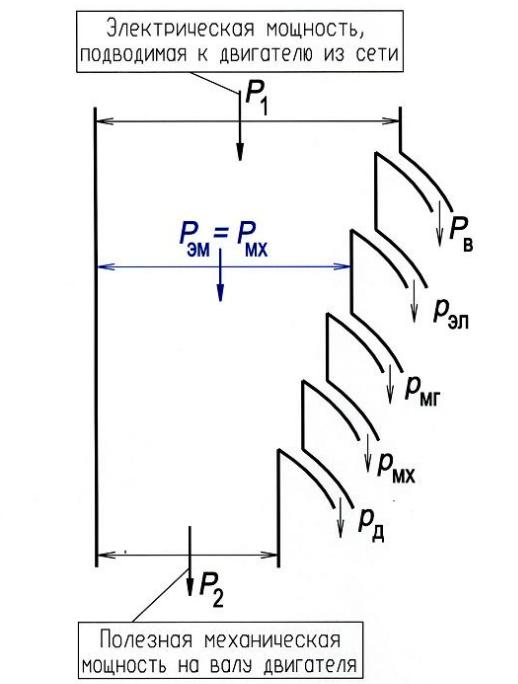
Рис. 2.2. Энергетическая диаграмма двигателя параллельного возбуждения
Электромагнитная мощность Pэм – мощность в воздушном зазоре, которая превращается в механическую мощность Pмх:
Pэм = Pмх = P1 – pв – pэл. |
(2.3) |
Полезная механическая мощность на валу
Р2 = Pмх– pмг – pмх – pд. |
(2.4) |
118
3.3. Уравнение равновесия вращающих моментов
Как и в генераторе, электромагнитный момент двигателя обусловлен взаимо-
действием поля возбуждения Ф машины с током якоря Ia [см. формулу (1.27)
на с. 67]
Mэм = Рэм/2πn = Рмх/2πn = cмIаФ. |
(2.5) |
Отличие состоит в том, что в генераторе этом момент является тормозным, то есть он действует навстречу моменту приводного двигателя. В двигателе
же электромагнитный момент Mэм является вращающим, то есть он приводит во вращение якорь и производственный механизм, подсоединенный к валу двигателя. В дальнейшем изложении индекс “эм” будем опускать.
Как следует из формулы (2.5), если в двигателе направление тока Iа в обмотке якоря и полярность полюсов возбуждения такие же, как в генераторе (рис. 2.3), то электромагнитный момент и в генераторе (Mг) и в двигателе (Mд) будет действовать в одном и том же направлении. Однако якорь двигателя и якорь генератора будут вращаться в этом случае в противоположных направлениях.
При отсутствии нагрузки на валу двигателя (холостой ход, Р2 = 0 и механическая мощность Pмх = pмг + pмх + pд) уравнение моментов представляется в виде
M = Mх, |
(2.6) |
где Mх = cмIа.хФ – момент холостого хода, который обусловливает вращение якоря двигателя при отсутствии нагрузки на валу. Ток холостого хода Iа.х якоря мал и обычно составляет 0,03…0,08 от номинального тока якоря Iа.N. Моменту
Mх соответствует мощность потерь pмг + pмх + pд, он является внутренним тормозным моментом и почти не зависит от нагрузки на валу двигателя.
При постоянной частоте вращения двигателя, n = const, и наличии нагрузки на валу уравнение моментов записывается так
M = Mх + Mнг= Мс, |
(2.7) |
где Mнг – момент нагрузки на валу, создаваемый производственным механизмом; Mс– статический момент сопротивления на валу двигателя.
На рис. 2.3 показано направление действия моментов двигателя при неизменной частоте вращения, n = const.
119