

4.3. Подготовка модели в виде пригодном к использованию функцией Minimize
В данной работе будем минимизировать значение линейного ускорения массы М2. Вычислим это значение. Для этого воспользуемся следующей функцией:

где USCORENIE - матрица значений, полученная при помощи метода Рунге- Кутта 4-го порядка; k3, l6 - варьируемые параметры.
Просчитав эту функцию, получим следующий график ускорения массы М2:
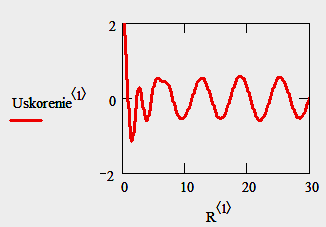
Однако, мы не можем использовать для минимизации непосредственно функцию вычисления ускорения, т.к. значение ускорения многократно уходит в отрицательную область, а значения функции должны быть неотрицательными. Поэтому для минимизации будем использовать функцию нахождения среднего квадрата ускорения. Эта функция имеет два входных параметра k3 и l6. Возвращает эта функция одно число – средний квадрат ускорений. (Приложение 2).
Имея функцию для вычисления среднего квадрата ускорения можно приступать к оптимизационным вычислениям.
20
4.4. Выполнение оптимизационных вычислений.
Опишем блок минимизации:
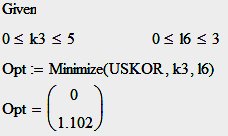
где, Given – ключевое слово, указывающее пакету MathCAD начало блока минимизации, 0<=k3<=5, 0<=l6<=3 - ограничение на изменение входных параметров, Opt:=Minimize(USKOR,k3,l6) – вызов функции минимизации, USKOR – имя функции, используемой для вычисления среднего квадрата ускорения (разброса ускорений).
Просчитав возможные варианты и выбрав тот, при котором разброс ускорений имеет минимальное значение, функция Minimize вернёт нам следующую матрицу-столбец: Opt, где 0 - оптимизированная величина жёсткости пружины k3 и 1.102 — оптимизированная величина l6.
21
4.5. Построение на одном графике вертикального перемещения верхней массы для исходных и найденных оптимизированных параметров.
Для сравнения ускорения при исходных и найденных оптимизированных параметрах построим их графики:
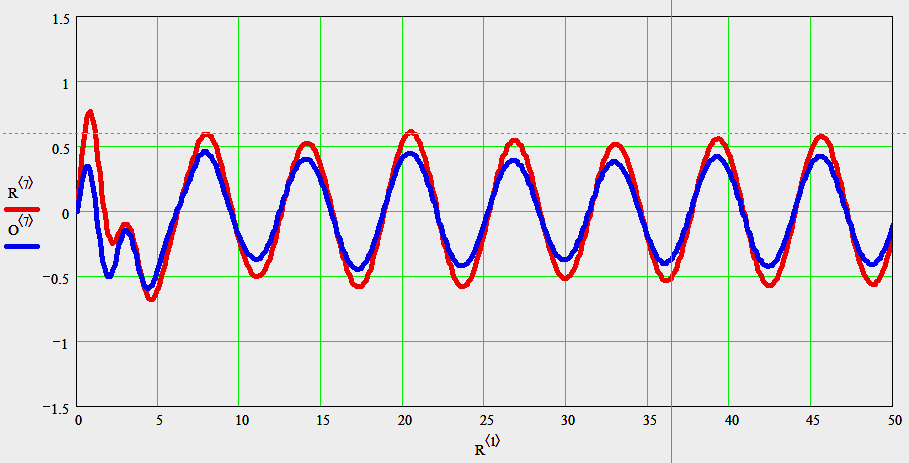
Как видно из графика, оптимизация произведена успешна.
Вычислим разброс ускорений (корень квадратный из суммы квадратов ускорений) для исходных параметров и найденных оптимизированных:

где k_3 и l_6 оптимизированные величины.
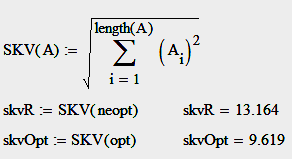
Как видно из этого результата, после выполнения оптимизационных вычислений разброс ускорений уменьшился.
22
5. Реализация в пакете MATLAB
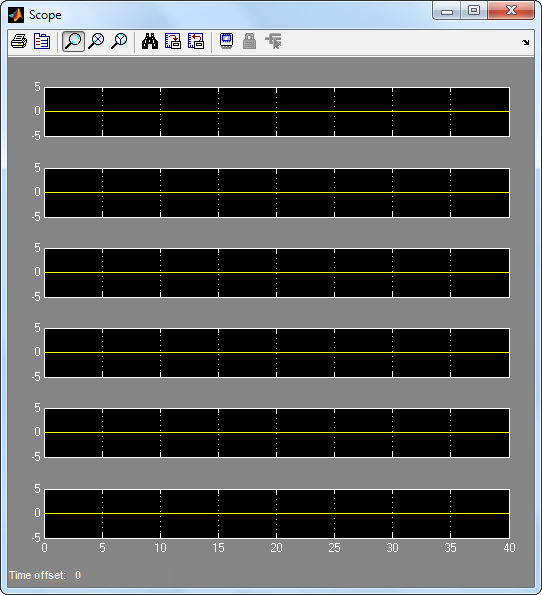
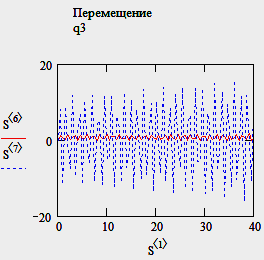
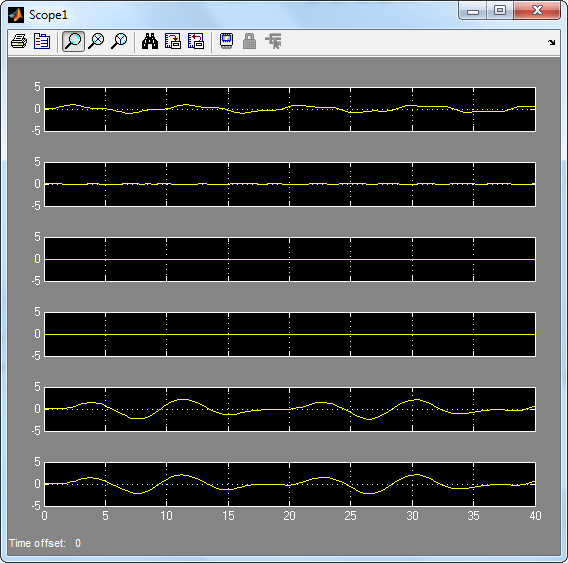
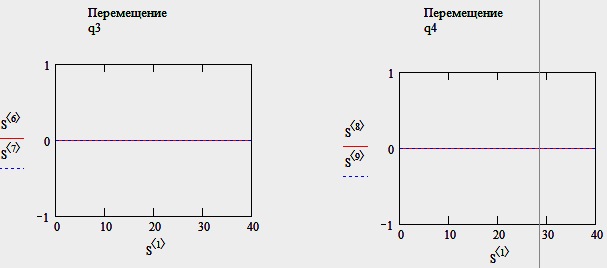
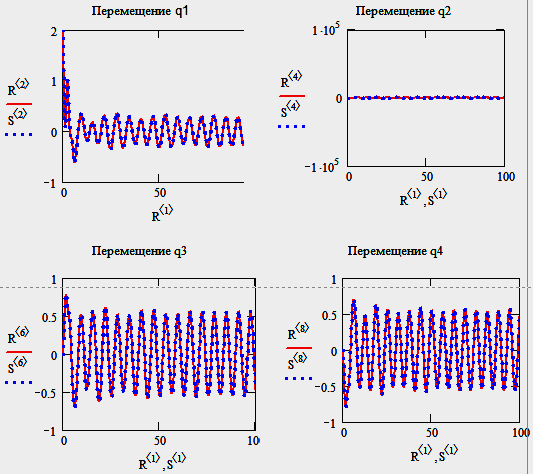
Все приведенные в данной работе тесты были также реализованы в среде MATLAB и имели успех. Итоговое значение (графики) реализации в двух различных средах оказалось полностью идентичным. Некоторые результаты тестов приведены ниже (в сравнении с пакетом MathCAD). Саму реализацию можно увидеть в Приложении 3 данной работы.
Тест № 1:
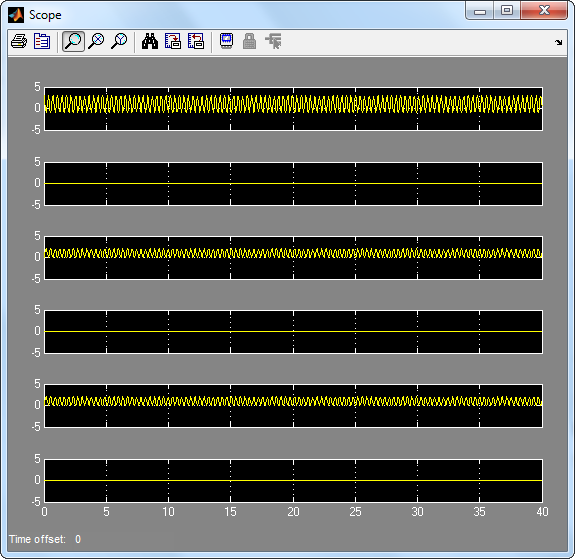
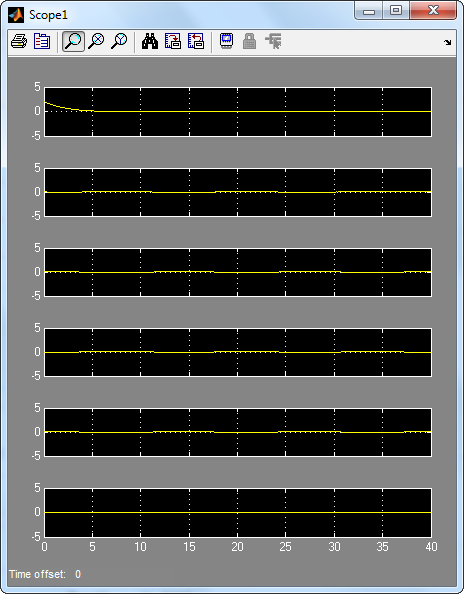
Тест № 2:
23
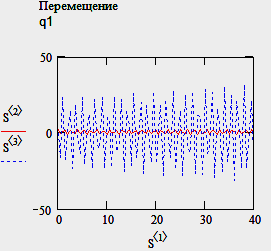
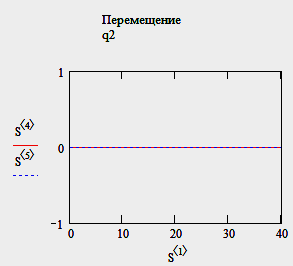
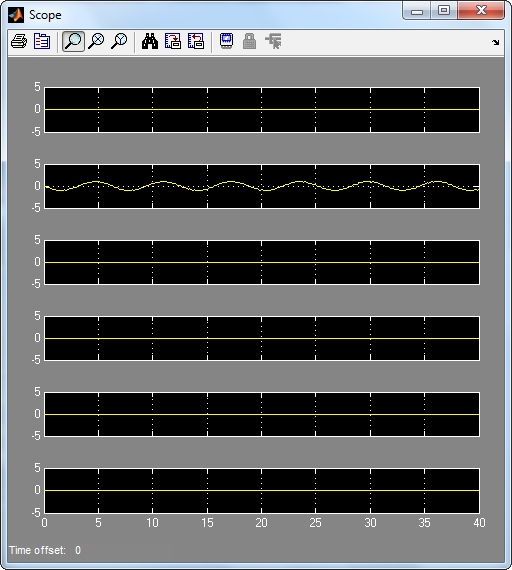
Тест № 3:
24
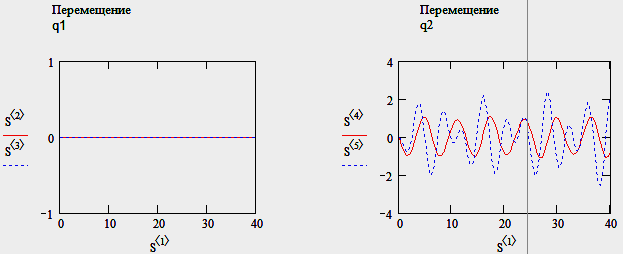
Тест № 4:
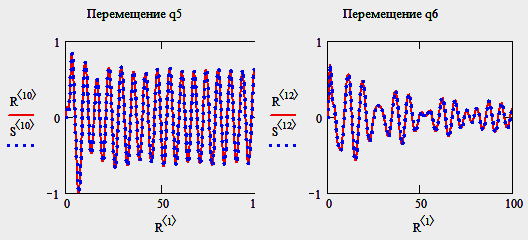
Тест № 5:
25

26
ЗАКЛЮЧЕНИЕ
Таким образом, при выполнении работы получены следующие результаты:
Получены уравнения, описывающие колебания многоопорной машины при кинематических воздействиях со стороны дороги;
Выполнено тестирование полученных уравнений на многочисленных примерах;
Построена оптимизационная модель, ориентированная на среду MATHCAD;
Выполнены оптимизационные вычисления;
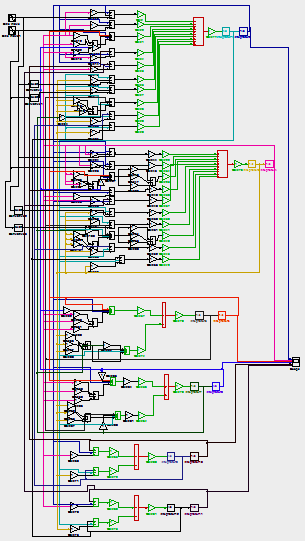
Получили структурную схему для решения системы ОДУ в среде MATLAB.
27
ПРИЛОЖЕНИЕ 1
28
ПРИЛОЖЕНИЕ 2

29
ПРИЛОЖЕНИЕ 3
30