

Вектор называется нулевым, если начало и конец его совпадают. Нулевой вектор не имеет определенного направления и имеет длину, равную нулю.
Определение. Векторы называются коллинеарными, если они лежат либо на одной прямой, либо на параллельных прямых.
Определение. Два вектора называются равными, если они коллинеарные, имеют одинаковую длину и одинаковые направления. (Все нулевые векторы равны).
Определение. Векторы называют компланарными, если они лежат либо
водной плоскости, либо в параллельных плоскостях.
4.2.Линейные операции над векторами. Проекция вектора на ось
1. Операция сложения;
2. Операция вычитания (частный случай сложения);
3. Операция умножения на вещественное число.
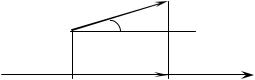
Вдальнейшем нам потребуются понятия: проекция вектора на ось и угол наклона вектора. Введем эти понятия.
В
А
А/ В/ и
Рис. 2
|
|
|
|
|
|
|
|
Определение. Проекцией вектора |
a |
AB |
на ось называется величина |
||||
|
|
|
|
|
|
|
|
|
|
|
|
на ось u будем обозначать |
|||
|
|
|
|
|
|||
направленного отрезка A B оси u. Проекцию a |
|
||||||
|
|
|
|
|
|
||
при а . |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Определение. Угол наклона вектора |
a |
AB |
|
к оси u – это угол между |
|||
двумя выходящими из точки А лучами, один из которых имеет направление, |
|||||||
|
|
|
|
|
|
|
|
|
|
совпадающее с направлением a , а другой - с осью u. |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
Теорема. |
Проекция |
вектора |
a |
на |
ось u |
равна длине |
вектора |
a , |
|
|
|
|
|
|
|
|
|
|
|
умноженной на косинус угла наклона a |
к оси u (видно из чертежа). |
|
|||||||
|
|
|
|
|
cos . |
|
|
|
|
|
|
при а |
а |
|
|
|
|||
В любой |
системе |
координат вектор |
характеризуется своими |
||||||
|
|
|
|
|
|
|
|
|
|
координатами, проекциями на соответствующие оси координат: |
AB {x, y, z} |
||||||||
.
16

Если координаты точек начала и конца вектора A(x1, y1, z1) ; B(x2 , y2 , z2 ) ,
|
|
|
|
|
|
|
|
|
то |
AB {x2 |
x1 , y2 |
y1 , z2 z1} |
т.е. координаты вектора |
AB |
равны разностям |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 y2 z2 . |
|||
координат конца и начала вектора. Длина вектора | AB | |
|
|||||||
4.3. Линейная зависимость и линейная независимость векторов на плоскости и в пространстве
Линейной комбинацией n векторов вектор |
|
, |
|
, …, |
|
будем называть |
a1 |
a2 |
an |
сумму произведений этих векторов на произвольные вещественные числа, т.е.
|
|
|
|
|
1 a1 |
|
2 a2 |
... n an , |
(4.1) |
где 1, 2 , ... n - любые вещественные числа.
Определение. Векторы |
|
, |
|
, …, |
|
называются линейно зависимыми, |
a1 |
a2 |
an |
если найдутся такие вещественные числа 1, 2 , ... n , из которых хотя бы одно
отлично от нуля, что линейная комбинация |
векторов |
|
, |
|
, |
…, |
|
с |
|||
a1 |
a2 |
an |
|||||||||
указанными числами обращается в нуль, то есть |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
1 a1 |
2 a2 ... n an 0 . |
|
|
|
|
|
|
|
(4.2) |
||
|
|
|
|
|
|
|
|
|
|
|
|
Определение. Векторы |
a1 , |
a2 , …, |
an |
называются |
линейно |
||||||
независимыми, если равенство нулю их линейной комбинации (4.1) возможно
лишь в случае, когда все числа 1, 2 , ... n |
равны нулю. |
|
|
|
|
|
|
Имеют место следующие утверждения. |
|
|
|
|
|
|
|
Теорема. Если хотя бы один из |
векторов |
|
, |
|
, …, |
|
является |
a1 |
a2 |
an |
|||||
нулевым, то эти векторы линейно зависимы.
Теорема. Если среди n векторов какие-либо (n-1) векторы линейно зависимы, то все n векторов линейно зависимы.
Теорема. Необходимым и достаточным условием линейной зависимости двух векторов является их коллинеарность.
Следствие 1. Если векторы a и b не коллинеарны, то они линейно независимы.
Следствие 2. Среди двух линейно независимых векторов не может быть нулевого вектора (иначе они оказались бы линейно зависимыми).
Теорема. Необходимым и достаточным условием линейной зависимости трех векторов является их компланарность.
Определение. Линейное пространство R называется n-мерным, если в нем существует n линейно независимых векторов, а любые из (n+1) векторов уже являются зависимыми, то есть размерность пространства – это максимальное число содержащихся в нем линейно независимых векторов.
17
4.4. Базис на плоскости и в пространстве
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Определение. |
Три линейно независимых вектора a |
, b , c образуют в |
|||||||||||
пространстве базис, если любой вектор |
|
может быть представлен в виде |
|||||||||||
d |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
некоторой линейной комбинации векторов |
a , |
b , |
c , то есть для любого d |
||||||||||
найдутся такие вещественные числа , |
, , что справедливо равенство: |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
a |
b |
c |
|
|
|
|
|
(4.3) |
|
|
|
|
|
|
|
|
|
|
|
где , , |
- |
|
|
– разложение вектора |
d |
по базису |
a , |
b |
, |
c , |
координаты d |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
относительно базиса a |
, b |
, |
c . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Определение. |
Два линейно независимых вектора a |
и |
b образуют на |
||||||||||
плоскости базис, |
если любой |
вектор |
|
может быть представлен в виде |
|||||||||
c |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
некоторой линейной комбинации векторов a и |
b , то есть для любого вектора |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c найдутся такие вещественные числа , |
, что справедливо равенство: |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c a b . |
|
|
|
|
|
(4.4) |
|||
Справедливы следующие утверждения:
1.Любая тройка некомпланарных векторов a , b и c образует базис в пространстве.
2.Любая пара лежащих на плоскости неколлинеарных векторов a и b образуют базис на этой плоскости.
3. Каждый вектор d может быть единственным способом разложен по
базису |
|
, |
|
, |
|
или, координаты каждого вектора |
|
относительно базиса |
|
, |
|||
a |
b |
c |
d |
a |
|||||||||
|
, |
|
определяются однозначно. |
|
|
|
|
||||||
b |
c |
|
|
|
|
||||||||
В чем необходимость базиса?
При задании базиса линейные операции над векторами становятся обычными линейными операциями над числами-координатами этих векторов, а именно:
Теорема. При сложении |
двух |
векторов |
|
и |
|
их координаты |
||||
d1 |
d2 |
|||||||||
относительно любого базиса |
|
, |
|
, |
|
складываются. При умножении вектора |
||||
a |
b |
c |
||||||||
d на любое число все его координаты умножаются на это число.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пусть |
d1 |
1 a |
1 b |
1 c |
; |
d1 |
{ 1 , 1 , 1}. |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d2 |
2 a |
2 b |
2 c |
; |
d2 |
{ 2 , 2 , 2 }. |
|||||||
Тогда в силу свойств линейных операций над векторами:
|
|
|
|
|
|
|
d1 |
d2 |
( 1 2 ) a |
( 1 2 ) b |
( 1 2 ) c . |
||
|
|
|
|
|
|
|
|
d1 |
( 1) a |
( 1) b |
( 1) c . |
||
|
|
|
|
18 |
|
|

4.5. Переход к новому базису
Пусть в пространстве R имеются два базиса: старый
и новый , ,…, . Каждый из векторов нового базиса можно выразить в виде линейной комбинации векторов старого базиса:
(4.5)
Найдем зависимость между координатами вектора в разных базисах.
Пусть рассматриваемый |
вектор |
имеет |
координаты |
( x1, |
x2, |
…, xn ) |
||
относительно старого базиса и координаты ( , |
, …, |
) |
относительно |
|||||
нового базиса, то есть |
|
|
|
|
|
|
|
|
= |
+ |
+…+ |
= |
+ |
+…+ |
. (4.6) |
||
Подставив значения , |
|
,…, из системы (1.14) в левую часть |
||||||
равенства (4.6), получим после преобразований: |
|
|
|
|
||||
то есть в матричной форме
или |
= |
. |
(4.7) |
Здесь
–
матрица перехода, причем коэффициенты разложения новых базисных векторов по старому базису образуют столбцы этой матрицы.
4.6. Декартова прямоугольная система координат
Реальное пространство, которое мы будем изучать, называется трехмерным R3. Каждая точка в нем определяется тройкой действительных чисел. Плоскость – R2.
Определение. Декартова прямоугольная система координат
представляет собой три взаимно перпендикулярные оси в пространстве с общим началом О и одинаковой масштабной единицей:
19
z |
|
|
|
|
ось Оx – ось абсцисс; |
|
|
|||||
|
|
|
|
ось Оy – ось ординат; |
|
|
||||||
|
A |
|
|
|
|
|
||||||
|
|
|
|
ось Оz – ось аппликат. |
|
|
||||||
|
|
|
|
|
|
|
||||||
O |
y |
|
|
Направленный |
|
отрезок |
|
называется |
радиус- |
|||
|
|
|
|
OA |
||||||||
x |
|
|
|
|
||||||||
|
|
|
вектором. |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
Рис. 3 |
|
|
|
Этой системе |
координат, отвечает тройка взаимно |
|||||||
|
|
|
|
ортогональных |
|
единичных |
базисных |
векторов, |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
которые обозначают |
i |
, |
j , |
k , |
то есть для каждого вектора d найдется, и при |
|||||||
том единственная, тройка чисел x, y, z такая, что справедливо равенство: |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
xi |
y |
j |
z k , |
|
|
(4.8) |
|
|
|
|
|
{1,0,0} , |
|
|
|
{0,0,1} , |
|
||
|
|
|
|
i |
j {0,1,0} , k |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d {x, y, z}. |
|
||
x, y, z – декартовы прямоугольные координаты d , |
|
|||||||||||
Теорема. Декартовы прямоугольные координаты x,
проекциям этого вектора на оси Оx , Оy , Оz, |
|
||||||||||||||
соответственно. |
|
|
|
|
|
|
|
|
|
|
z |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||||||||
d OA OB OC |
|
|
OB yi |
|
|
C |
|
||||||||
; |
OA x i |
; |
; |
OC z k |
. |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
- единичные векторы, то |
|
|
y |
||||||
|
Так как i |
, j , |
k |
|
j |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| OA | x; | OB | y; | OC | z . |
|
|
|
|
|
k |
|
||||||||
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O |
|
|
Обозначим , |
–углы наклона вектора |
|
i |
|||||||||||
|
d |
|
|
||||||||||||
к осям Ox, Oy, Oz. |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Определение. |
|
|
Числа |
cos , |
|
cos , |
|
|
cos |
|
||||
направляющими косинусами вектора d .
Из предыдущих теорем вытекает, что
x | d | cos ;
y, z вектора d равны
D
d
B
x A
Рис. 4 принято называть
|
|
y | d | cos ; |
(4.9) |
z | d | cos .
Учитывая, что d – диагональ прямоугольного параллелепипеда, имеем определение длины вектора через его координаты
|
|
|
| d | |
x2 y2 z2 . |
(4.10) |
А направляющие косинусы d определяются
20